kinematic专题
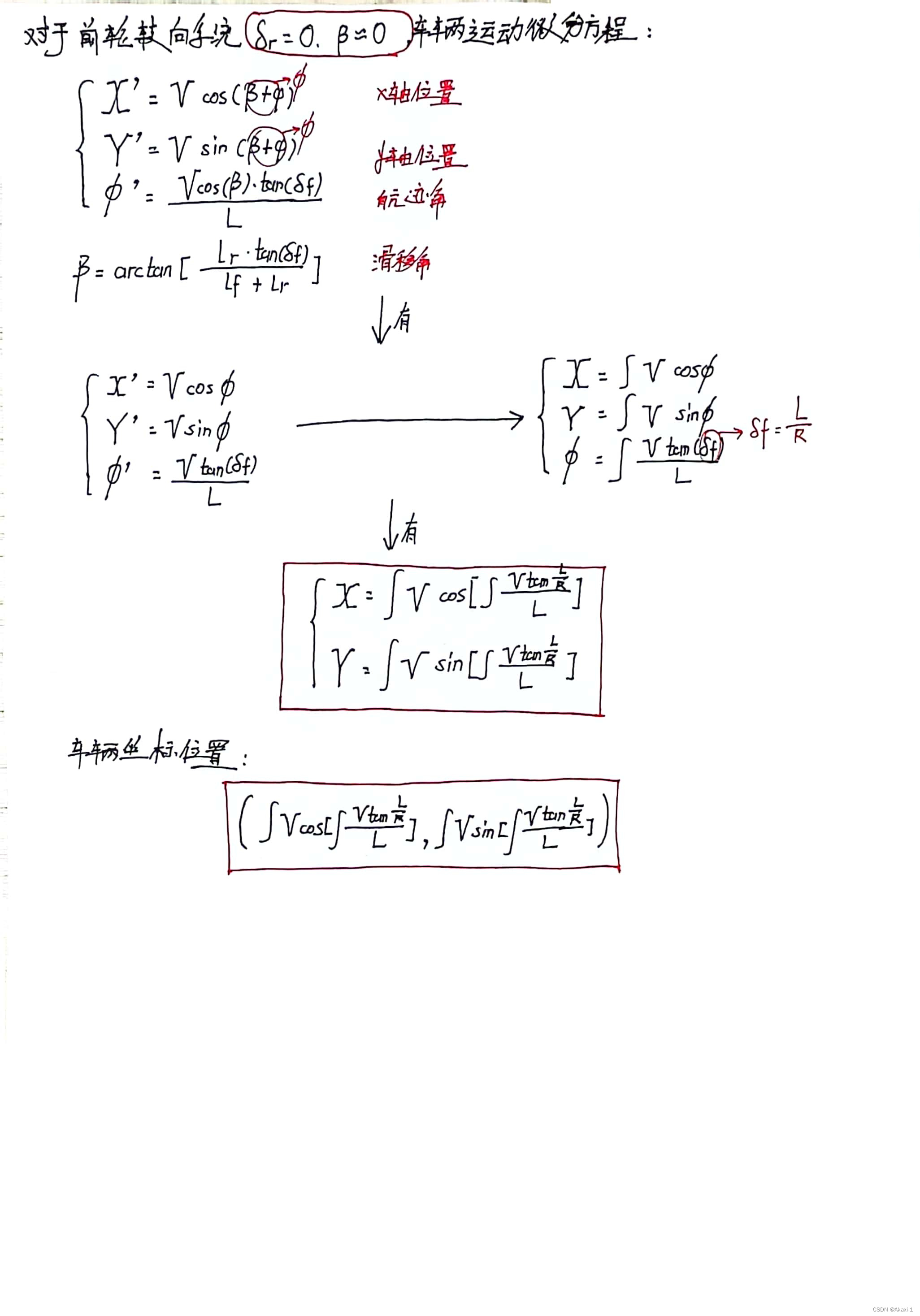
【自动驾驶车辆-运动控制】运动学模型(Kinematic Model) | 手写数学推导公式 by.Akaxi
【前言】 在设计自动驾驶规控算法时,常常需要获取车辆的各种位姿、角度等信息,要控制车辆的运动,首先要对车辆的运动建立数字化模型,模型建立的越准确,对车辆运动的描述越准确,对车辆的跟踪控制的效果就越好。除了真实反映车辆特性外,建立的模型也应该尽可能的简单易用,自行车模型(Bicycle Model)是一种常见的车辆运动学模型,以下是对车辆运动学模型的数学公式推导: -----------
【物联网】简要解释RTK(Real-Time Kinematic)>>实时动态差分定位
引言: RTK(Real-Time Kinematic)技术是一种基于差分GPS的高精度定位技术,它通过实时通信和数据处理,能够提供厘米级甚至亚米级的定位精度。RTK技术在许多领域都得到了广泛应用,如测绘、航空航天、农业等。本文将介绍如何使用C语言实现RTK技术的基本功能,包括获取GPS数据、差分修正数据以及计算修正后的位置。同时,还将探讨RTK技术的关键技术细节,如数据链路、快速数据处理、多频