jog专题
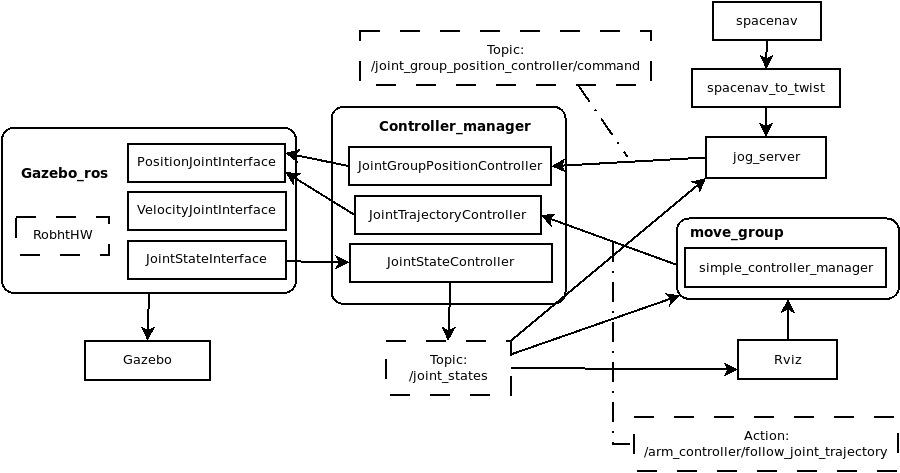
ROSMoveit中机械臂的点动(Jog)实现
文章目录 启动文件的分析ur_gazebo/ur5.launchur5_moveit_config/ur5_moveit_planning_execution.launchur5_moveit_config/moveit_rviz.launch 控制控制器的切换moveit_jog_arm/spacenav_cpp.launch手动输入jog_server的工作原理 在最新的Mo

点位运动(ZeroPos) 与 JOG运动(点动) 的区别?
点位运动指: 点到点 的运动,点位运动包括绝对运动和相对运动,指令中都包含了目标位置(相对运动); JOG运动指点动:注意不是点位运动,JOG运动指令中没有目标位置,只要发出了开始运动命令,就一直运动,直到发出停止命令为止。
施耐德Lexium23A运行JOG停止时无减速过程解决方案
在现场调试时发现,如果Lexium23A工作在Pr模式下,无论是通过CANopen总线控制软件DI接通(相应DI点设置为JOG运行)还是实际的物理点接通,在JOG停止时,伺服电机会瞬间停止,造成机械冲击,并且在调整P1-34,P1-35,P1-36加减速时间与P1-08位置指令滤波后仍无改善,但如果使伺服进入P4-05参数,按下ENT键之后,显示面板显示-JOG-时,此时通过CANopen总线控制
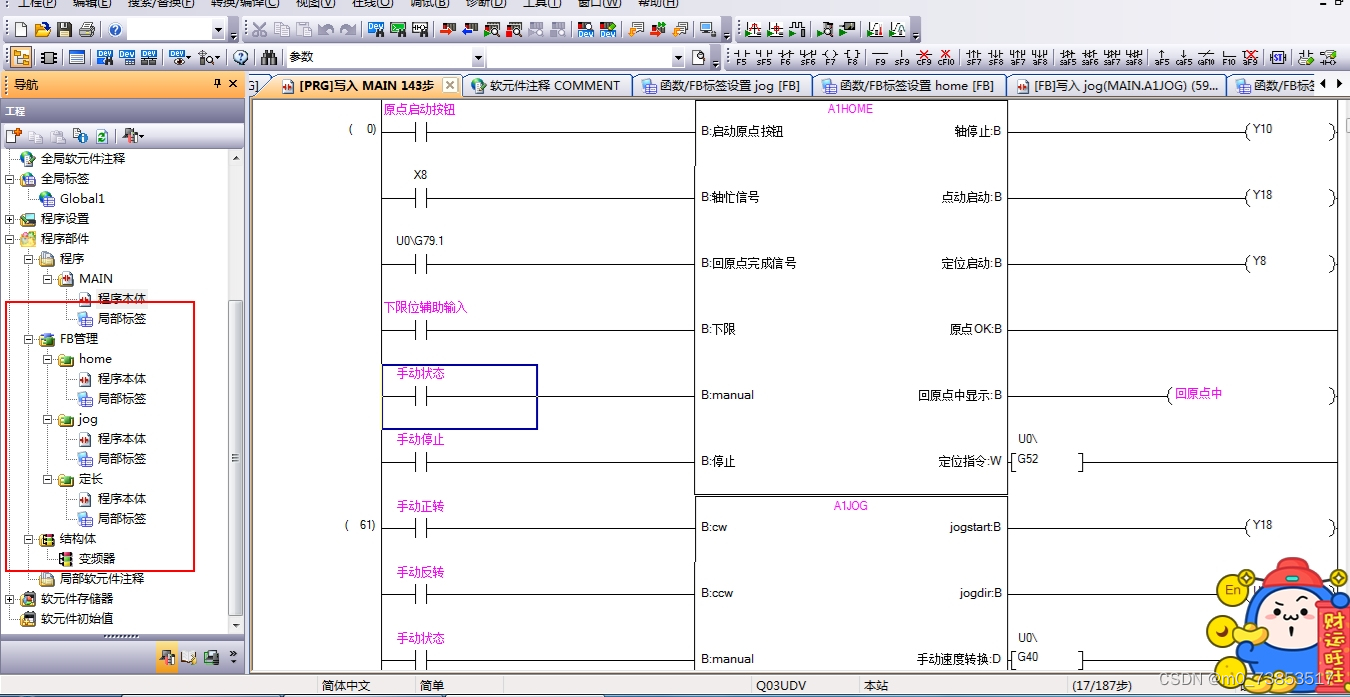
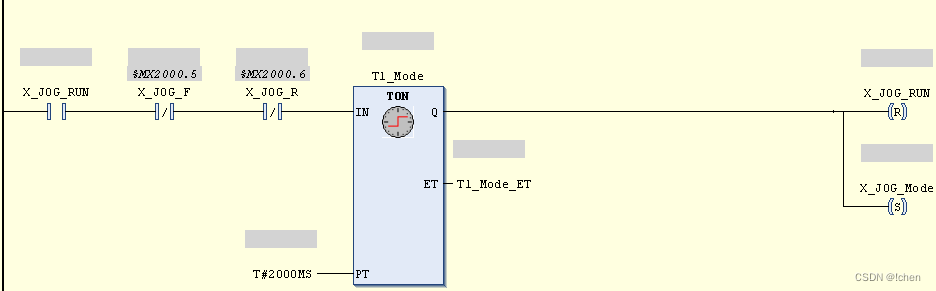
三菱PLC QD70定位模块的用法 ,JOG HOME 绝对定位
三菱PLC QD70定位模块的用法,JOG HOME 绝对定位 全都做成了子模块FB,你只须直接调用,省却你去研究的时间,简单易用。 有源程序。 YID:9615658227491121工业自动化

机器人中的 jog 是什么意思?
1 jog是什么? 用户在操作工业机器人时经常会见到 jog 这个词,它一般翻译成“点动” [ 1 ] ^{[1]} [1],或者“单步运动” [ 2 ] ^{[2]} [2]。在有些时候,例如示教,用户需要手动控制机器人以时断时续的方式运动,而不是一直连续地运动,这时就需要“点动”功能。“点动”强调用户手动操作