industrial专题

AST: Asymmetric Student-Teacher Networks for Industrial Anomaly Detection代码运行
环境 設置遠程路徑 conda create --name zgp_ast python=3.7.7 pip install -r requirements.txt PIL>=7.1.2改爲Pillow>=7.1.2 Building wheels for collected packages: efficientnet-pytorchBuilding wheel for efficient

ROS-Industrial 硬件支持
ROS-Industrial硬件支持 ROS-Industrial程序的目标是为许多不同种类的工业设备提供ROS接口,包括PLC,机器人控制器,Servos,人机界面 工业机器人 下表总结了各种机器人接口的支持级别。 所有接口都使用市售选项(尽管可能需要额外付费才能获得所需的选项)。 由于每个供应商提供不同的功能接口,因此每个供应商的功能可能会有所不同。 注意存在明显限制的地方。 有关更多详

ROS Industrial 软件包_笛卡尔路径规划器_实现
笛卡尔(Descarte)路径规划 使用笛卡尔包 使用笛卡尔包需要软件开发人员创建三个对象Obiects: 一个机器人模型(a robot model),将用来计算正向运动学和逆向运动学。 一个轨迹点的轨迹(a trajectory of trajectory points),用于定义路径。 一个规划器(a planner),将使用提供的机器人模型来完成沿着轨迹寻找有效路线的工作。

ROS Industrial 软件包_笛卡尔路径规划器_介绍
笛卡尔(Descartes) 概要 笛卡尔(Descartes)是ROS-Industrial项目,用于对未定义的笛卡尔轨迹执行路径规划。 动机 当前的MoveIt / ROS接口专注于拾取pick和放置place应用。在典型的拾取和放置应用中,起始位置和目标位置是路径规划者的唯一输入。相比之下,许多工业应用必须遵循预定义的笛卡尔路径,不仅起始和结束位置很重要,而且两者之间的路径也很
ROS Industrial教程(七)_笛卡尔规划和执行2
加载参数 在本练习中,我们将加载一些ROS参数以初始化程序中的重要变量。 定位练习源文件 ·转到位于plan_and_run/src/plan_and_run_node.cpp中的主应用程序源文件。 ·在主程序中,找到对application.loadParameters()的函数调用。 ·转到位于plan_and_run/src/tasks/load_parameters.cpp中的该

ROS Industrial教程(七)_笛卡尔规划和执行1
笛卡尔规划和执行 引言 目标 接下来将介绍如何使用笛卡尔库中的各种组件来从半约束点轨迹规划和执行机器人路径。 包括: ·熟悉笛卡尔工作流程。 ·了解如何加载自定义的笛卡尔RobotModel。 ·了解如何从6DOF(Six degrees of freedom六自由度)工具姿势创建半约束轨迹。 ·使用笛卡尔规划器规划机器人路径。 ·将笛卡尔路径转换为MoveIt!消息以执行运动。

Next-ViT: Next Generation Vision Transformer for Efficient Deployment in Realistic Industrial Scenar
论文链接:https://arxiv.org/pdf/2207.05501.pdf 代码地址:https Next-ViT: Next Generation Vision Transformer for Efficient Deployment in Realistic Industrial Scenar 一、引言二、实现细节一、Next Convolution Block (NCB)二、Mu

异常检测(四): Towards Total Recall in Industrial Anomaly Detection
这是在MVTec AD数据集上排名第一的论文,其检测准确率和分割准确率分别达到了99.1%和98.1% 【摘要】 在大规模的工业制造中,检测出有缺陷的部分是至关重要的环节,基于正常的无缺陷图像来拟合模型。尽管为每个类别手动设置解决方案是可能的,但目标是构建一个系统能同时自动在许多不同类别任务上效果良好。最好的方法是将ImageNet模型的嵌入向量和异常检测模型相结合。本文中,我们扩展这一工作,
【目标检测】|YOLOV6 YOLOv6: A Single-Stage Object Detection Framework for Industrial Application
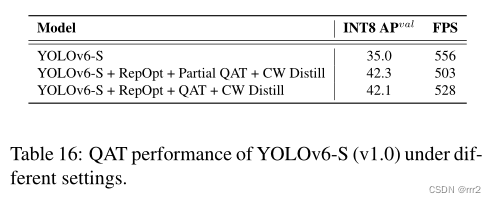
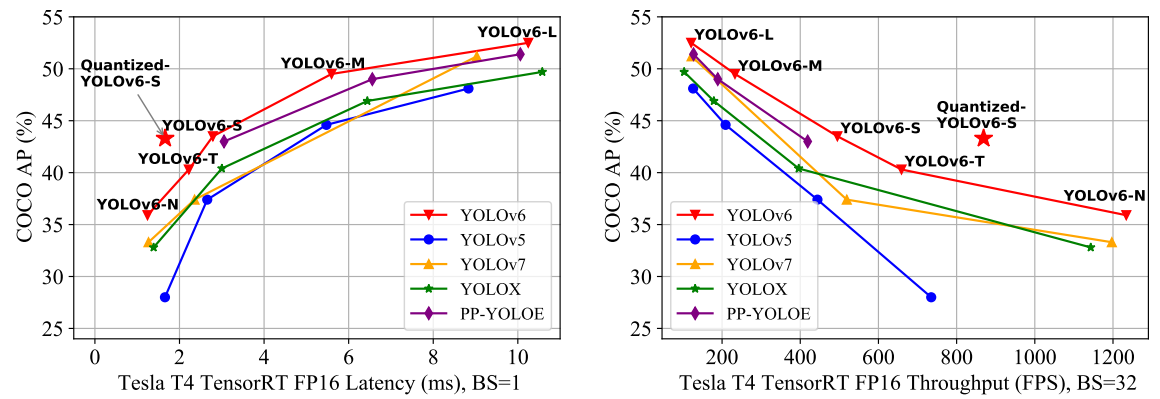
YOLOv6:一种用于工业应用的单级目标检测框架 吸收了最近网络设计、训练策略、测试技术、量化和优化方法的思想。 构建一套不同规模的可部署网络,以适应多样化的用例。 我们的量化版本的YOLOv6-S甚至达到869fps时AP43.3%。 (1)RepVGG[3]的重新参数化未能充分利用,小型网络,普通单路径架构是更好的选择,但对于大型模型,参数的指数增长和单路径架构的计算成本使其不可行。
【目标检测】YOLOv6: A Single-Stage Object Detection Framework for Industrial Applications 论文翻译
原始题目YOLOv6: A Single-Stage Object Detection Framework for Industrial Applications中文名称YOLOv6: 一个面向工业应用的单阶段目标检测框架发表时间2022年9月7日平台arXiv来源美团文章链接https://arxiv.org/abs/2209.02976开源代码https://github.com/meitua

FeO Content Prediction for an Industrial Sintering Process based on Supervised Deep Belief Network
Abstract 基于应用于工业烧结过程中,监控关键质量指标非常重要,指标难以在线测量。软测量技术是一种很好地在线测量质量指标的解决方案。深度学习的非线性数据处理能力被广泛应用于软测量领域。 本文提出了一种有监督的深度置信网络(SDBN),通过每个受限玻尔兹曼机的输入变量中引入质量变量来提取软传感器的质量相关特征。 通过对一个实际工业烧结过程的实例研究,SDBN显示出比原始的深度信念网络和堆