impedance专题
MKS MWH-5匹配器Automatc matching impedance Network手侧
MKS MWH-5匹配器Automatc matching impedance Network手侧

机器人力控(Force control)与阻抗/导纳控制(Impedance/Admittence control)
机器人力控很显然是控制机器人与交互对象之间接触力大小与方向的。也就是说调节机器人的接触力为期望的接触力!!! 那么阻抗控制也很显然,就是控制机器人与环境交互时的阻抗。也就是说让机器人的阻抗调节为期望的阻抗。阻抗模型的定义为二阶动态系统,即质量、阻尼、弹簧。阻抗的输入为运动物理量,输出为调节力!!!通过控制运动来控制力,也就是间接力控!!!阻抗控制是一种与力和位置相关的动态控制方法。 例如:压缩

Impedance and admittance control in robot force control method
阻抗控制是一种常用的机器人控制方法,旨在实现机器人与外部力的互动,使机器人能够调整其运动以适应外部力的变化。这种控制方法通常用于力控制和物理人机交互中,其核心思想是模拟机器人的关节或末端工具的柔软性,以实现与外部环境或物体的适应性互动。 阻抗控制是一种控制方法,旨在调节机器人的运动和外部力之间的动态关系。它的核心思想是模拟机器人的柔软性(或刚性),使其能够适应不同的外部力,并在与外部环境或物体的
Impedance and admittance control in robot force control method
阻抗控制是一种常用的机器人控制方法,旨在实现机器人与外部力的互动,使机器人能够调整其运动以适应外部力的变化。这种控制方法通常用于力控制和物理人机交互中,其核心思想是模拟机器人的关节或末端工具的柔软性,以实现与外部环境或物体的适应性互动。 阻抗控制是一种控制方法,旨在调节机器人的运动和外部力之间的动态关系。它的核心思想是模拟机器人的柔软性(或刚性),使其能够适应不同的外部力,并在与外部环境或物体的
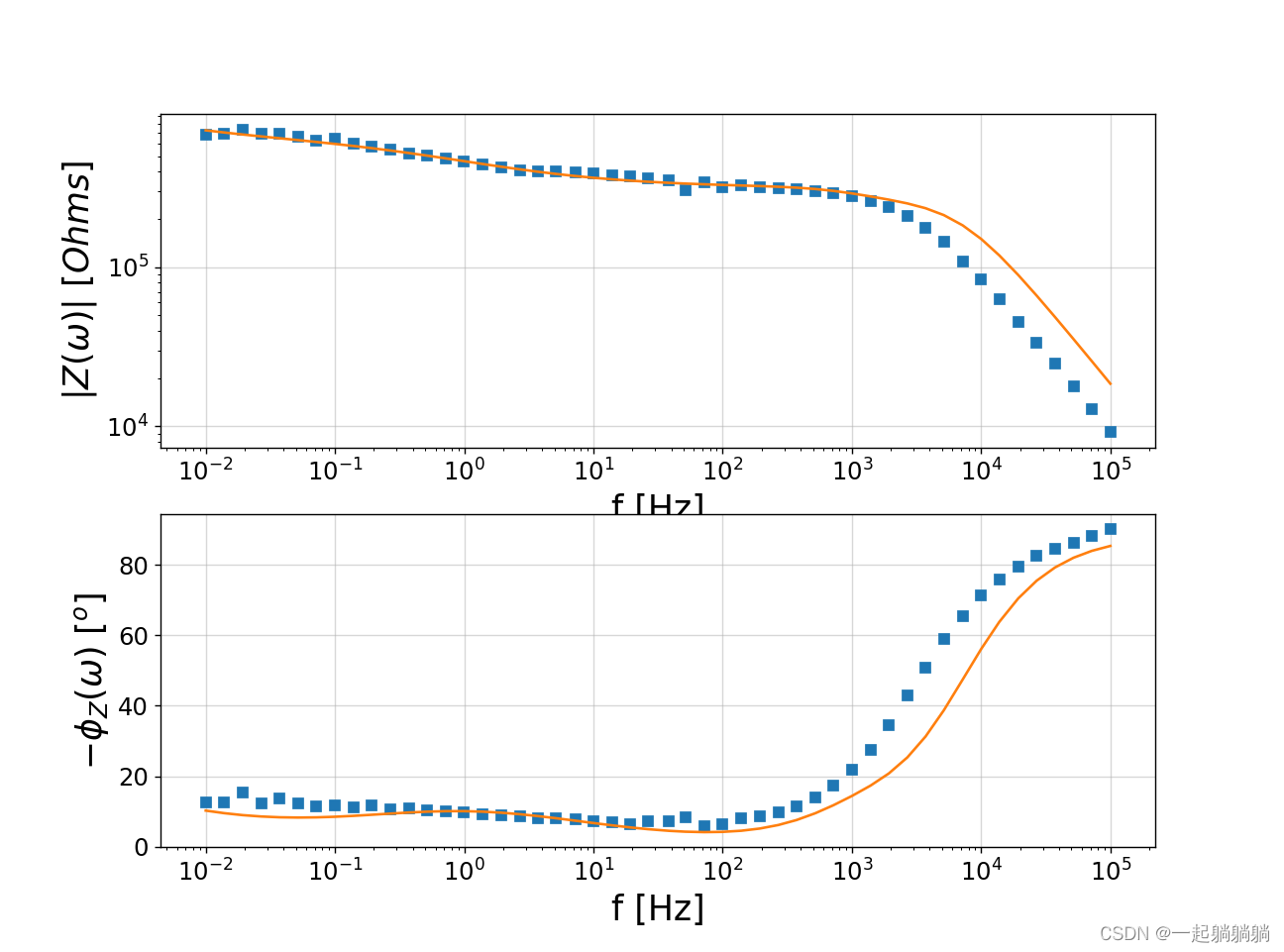
impedance用于阻抗谱拟合的Python库,bode图的优化方法,impedance输出bode图的优化方法
目录 1、优化原因 2、异常原因分析 3、修改方法 1、优化原因 下面是一段用impedance拟合一条阻抗数据的代码示例 from impedance.preprocessing import readGamryfrom impedance.preprocessing import ignoreBelowXfrom impedance.models.circuits im