gtsam专题

GTSAM | gtsam::ISAM2Params
文章目录 概述一、定义介绍二、功能作用三、主要内容四、实例演示解释 概述 本届介绍了GTSAM库的gtsam::ISAM2Params类。 一、定义介绍 gtsam::ISAM2Params 是 GTSAM 库中用于配置 ISAM2(Incremental Smoothing and Mapping 2)优化器的参数类。ISAM2 是一种用于大规模非线性优化的增量式

GTSAM | gtsam::PriorFactor
文章目录 概述一、定义介绍二、功能作用三、主要内容四、实例演示 概述 本节介绍了GTSAM中的gtsam::PriorFactor类。 一、定义介绍 gtsam::PriorFactor 是 GTSAM(Graph-based Trajectory and Mapping)库中的一个类,用于定义先验因子。在因子图优化中,先验因子用于将一些变量的先验信息(例如,位置、姿
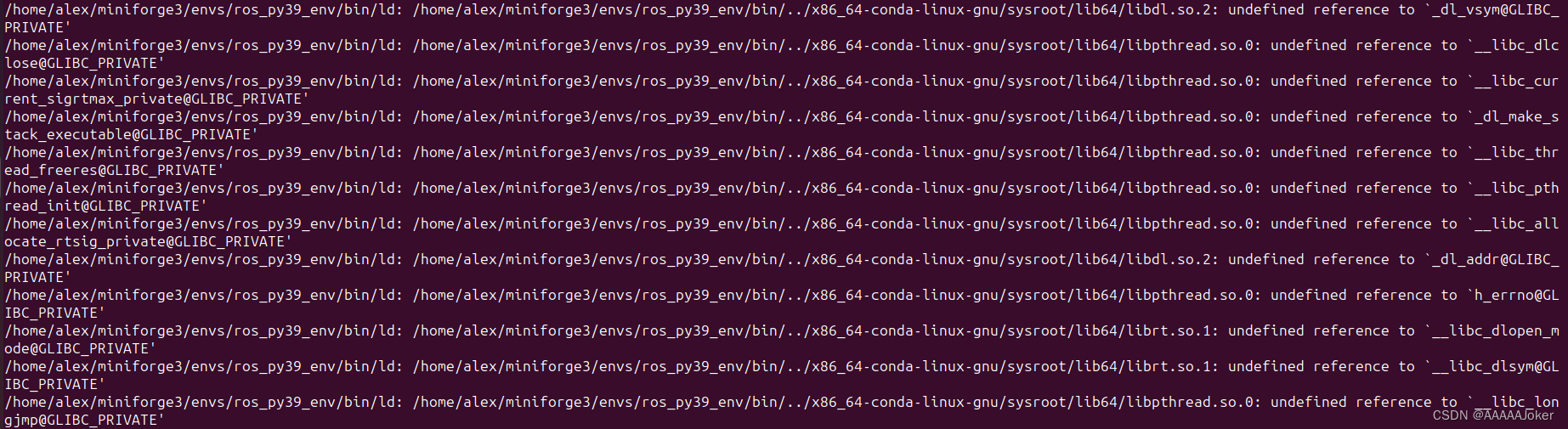
编译GTSAM库时报错undefined reference to `_dl_vsym@GLIBC_PRIVATE‘
/home/alex/miniforge3/envs/ros_py39_env/bin/ld: /home/alex/miniforge3/envs/ros_py39_env/bin/../x86_64-conda-linux-gnu/sysroot/lib64/libdl.so.2: undefined reference to `_dl_vsym@GLIBC_PRIVATE' SOLUTIO

iSAM2 部分状态更新算法 (II - 源码阅读 - GTSAM)
Title: iSAM2 部分状态更新算法 (II-源码阅读-GTSAM) 文章目录 I. 前言II. GTSAM 中实现直接反向替代 (Back-Substitution)1. GTSAM 中实现全部反向替代计算 (Full Back-Substitution)A. 高斯条件概率均值计算B. 递归法实现直接反向替代 2. GTSAM 中实现部分反向替代计算 (Partial Back
Ubuntu18.04安装GTSAM库(亲测可用)
在SLAM(Simultaneous Localization and Mapping)和SFM(Structure from Motion)这些复杂的估计问题中,因子图算法以其高效和灵活性而脱颖而出,成为图模型领域的核心技术。GTSAM(Georgia Tech Smoothing and Mapping)库,作为因子图算法的一个杰出代表,由佐治亚理工学院的团队开发,是机器人学和计算机视觉领域