frenet专题
自动驾驶---什么是Frenet坐标系?
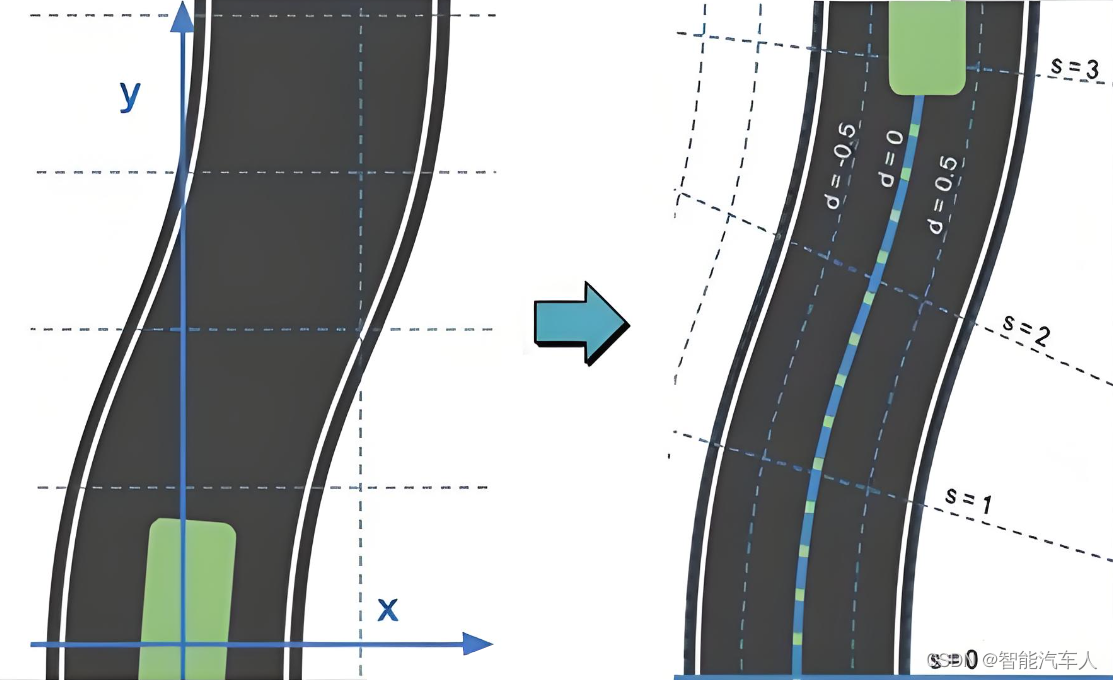
1 背景 为什么提出Frenet坐标系?Frenet坐标系的提出主要是为了解决自动驾驶系统在路径规划的问题,它基于以下几个原因: 符合人类的驾驶习惯: 人类驾驶员在驾驶过程中,通常不会关心自己距离起点的横向和纵向距离,而是会关注车辆相对于道路的相对位置,比如与车道线的距离。Frenet坐标系提供了一种与人类驾驶习惯相符的描述方式,使得自动驾驶系统能够更好地模拟人类的驾驶行为。
【自动驾驶坐标系基础】Frenet坐标系和Cartesian坐标系的相互转换
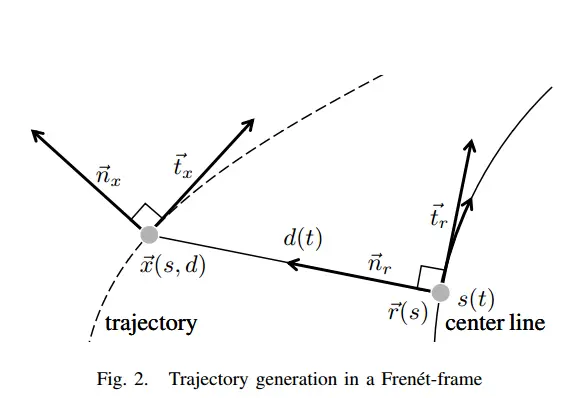
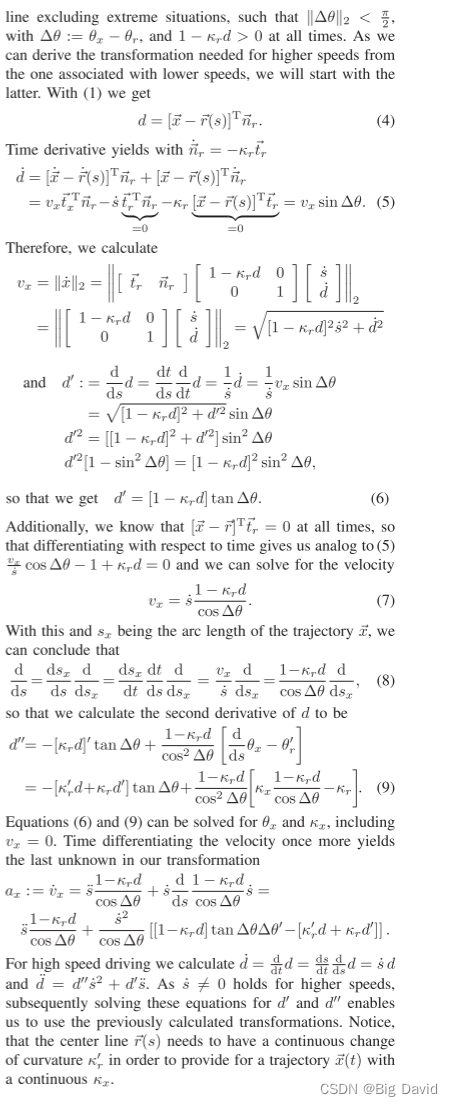
Frenet坐标系和Cartesian坐标系的相互转换 2023.12.12 1 变量含义 Frenet和Cartesian相互转换即 [ s , s ˙ , s ¨ , d , d ˙ , d ¨ ] ↔ [ X , θ x , κ x , v x , a x ] [s,\dot{s},\ddot{s},d,\dot{d},\ddot{d}] \leftrightarrow[\bol
Frenet坐标系下动态街道场景的最优轨迹生成
0 前言 有两个主要算法已经在实际中使用: (1)大多数研究组采用插值来解决规划问题,如奥迪、斯坦福最近演示中使用了回旋曲线,贝塞尔以及多项式曲线也被其他研究组使用。主要原因是在结构化环境中增强映射可以提供所需路点,在平滑性、连续性、车辆约束、速度以及舒适性方面提供了保证; (2)图搜索技术是实际应用中第二个比较常用的算法,尤其是状态格。选择该技术主要原因是保证了舒适性安全性并且满足了车辆约束条