estimate专题

sns报错 UserWarning: Dataset has 0 variance; skipping density estimate.
报错信息 UserWarning: Dataset has 0 variance; skipping density estimate. Pass warn_singular=False to disable this warning. 三维数组维度(1000, 27,1),取出第一个元素画出分布图保存检查错误原因,print(Mcases[:,:,0].shape) 显示维度(1000, 27)
Learning to Estimate 3D Human Pose and Shape from a Single Color Image
CVPR2018 任务:从单张图估计人的3D形状(3d shape)。 方法: 先估计出heatmap和Silhouette, 再分别估计出代表shape和pose的参数和。输入到SMPL模型中, 得到3D shape。 需要注意, 估计和的这一步是可以离线训练的, 也就是认为选择和, 得到3D shape, 将其投影到各个方向, 得到heatmap和silhouette, 这样输入

Oracle为什么不按照estimate_percent来分析表?
之前在用户现场,被问道“estimate_percent有时候不按照我们指定值来收集统计信息”时,当时以为客户环境设置有问题,没多考虑。 今天小研究了一下,还真不按照设置来,在这里简单总结并说明了一下原因。 DB 11.2.0.3.0 redhat 5.7 创建一个测试表: SQL> conn user1/oracleConnected.SQL> create table tes

滴滴 - eta(Estimate the Travel Time)
这里写目录标题 1 Learning to Estimate the Travel Time,20182 Multi-task Representation Learning for Travel Time Estimation,2018 ETA - Estimate the Travel Time,耗时估计,通行时间估计,到达时间估计 1 Learning to Estima
一篇五分生信临床模型预测文章代码复现——Figure 10.机制及肿瘤免疫浸润(九)——Estimate——倒数第二节
之前讲过临床模型预测的专栏,但那只是基础版本,下面我们以自噬相关基因为例子,模仿一篇五分文章,将图和代码复现出来,学会本专栏课程,可以具备发一篇五分左右文章的水平: 本专栏目录如下: Figure 1:差异表达基因及预后基因筛选(图片仅供参考) Figure 2. 生存分析,箱线图表达改变分析(图片仅供参考) Figure 3. 基因富集分析(图片仅供参考) Figure

magento 1.4 -- 推荐插件 -- 产品页计算运费插件(Estimate Shipping on the Product Page)
名称: Estimate Shipping on the Product Page Extension Key:magento-community/EcomDev_ProductPageShipping 网址: http://www.magentocommerce.com/magento-connect/EcommerceDeveloper/extension/3860/ecom
ros(23):接收rviz中的2D Nav Goal、2D Pose Estimate消息
1 rviz 教程 1.1 2D Nav Goal 2D Nav Goal (Keyboard shortcut: g) This tool lets you set a goal sent on the "goal" ROS topic. Click on a location on the ground plane and drag to select the orientation:

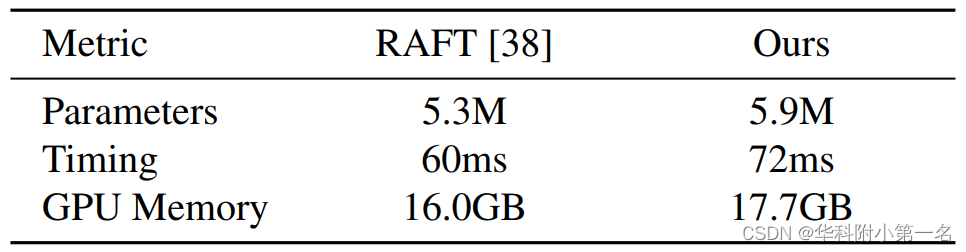
光流 GMA : Learning to Estimate Hidden Motions with Global Motion Aggregation
GMA的架构 文中的的全局运动聚合(GMA)模块包含在阴影框中,这是RAFT的一个独立附加模块,具有较低的计算开销,可显著提高性能。它将视觉上下文特征和运动特征作为输入,并输出聚合的运动特征,这些特征在整个图像中共享信息。然后将这些聚合的全局运动特征与局部运动特征和视觉上下文特征连接起来,由GRU解码为剩余流。这使网络能够根据特定像素位置的需要,灵活地选择或组合局部和全局运动特
【论文简述】Learning to Estimate Hidden Motions with Global Motion Aggregation(ICCV 2021)
一、论文简述 1. 第一作者:Shihao Jiang 2. 发表年份:2021 3. 发表期刊:ICCV 4. 关键词:光流、代价体、遮挡区域、全局聚合、GRU 5. 探索动机:遮挡问题是光流最大的挑战之一。 定义遮挡:We first define what we mean by occlusion in the context of optical flow estimatio