embodied专题

具身智能(Embodied Intelligence)概述
目录 一、引言 二、具身感知 三、具身交互 四、具身智能体 五、虚拟到现实 一、引言 最近无论是斯坦福机器人炒虾,还是特斯拉官宣机器人进厂,都赚足了眼球,实力证明了具身智能(Embodied Intelligence)的火爆。 先不说具身智能是实现AGI的关键环节,也是未来研究的重要方向,从发论文的角度来看,今年的各大顶会,比如CVPR,具身智能就排了热门研究领域
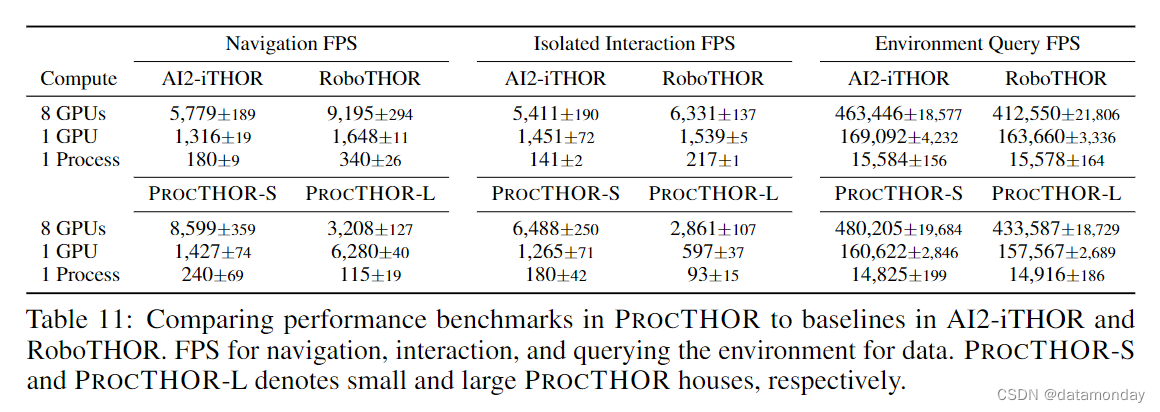
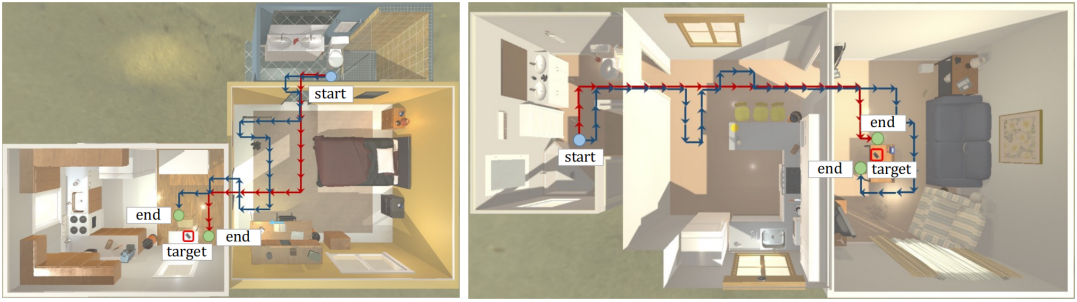
【具身智能评估7】ProcTHOR: Large-Scale Embodied AI Using Procedural Generation
论文标题:ProcTHOR: Large-Scale Embodied AI Using Procedural Generation 论文作者:Matt Deitke, Eli VanderBilt, Alvaro Herrasti, Luca Weihs, Jordi Salvador, Kiana Ehsani, Winson Han, Eric Kolve, Ali Farhadi, An
Look, Listen, and Act: Towards Audio-Visual Embodied Navigation(2020)
看、听和行动:面向视听体现的导航(2020) 摘要 移动智能代理的一个关键能力是在一个环境中整合来自多个感官输入的证据,并做出一系列动作来实现其目标。 在本文中,我们试图探讨视听嵌入式导航问题,即在仅给定原始的以自我为中心的视觉和听觉感官数据的情况下,规划从场景中随机起始位置到室内环境中声源的最短路径的任务。 为了完成这项任务,代理需要学习各种模式,即将音频信号与视觉环境相关联。 在这
Language Models Meet World Models: Embodied Experiences Enhance Language Models翻译
摘要 尽管大型语言模型(LM)在众多任务中表现出了出色的能力,但它们经常在物理环境中无法进行的简单推理和计划,例如理解目标的持续性或计划家庭活动。这种局限源于以下事实:LM仅在书面文本中训练,而缺乏基本的实体知识和技能。在本文中,我们提出了一种新的增强LM的范式,其通过世界模型对LM进行微调,以获得多种实体知识,同时保留其通用语言能力。我们的方法在世界模型中部署了一个实体智能体,以作为物理世界(
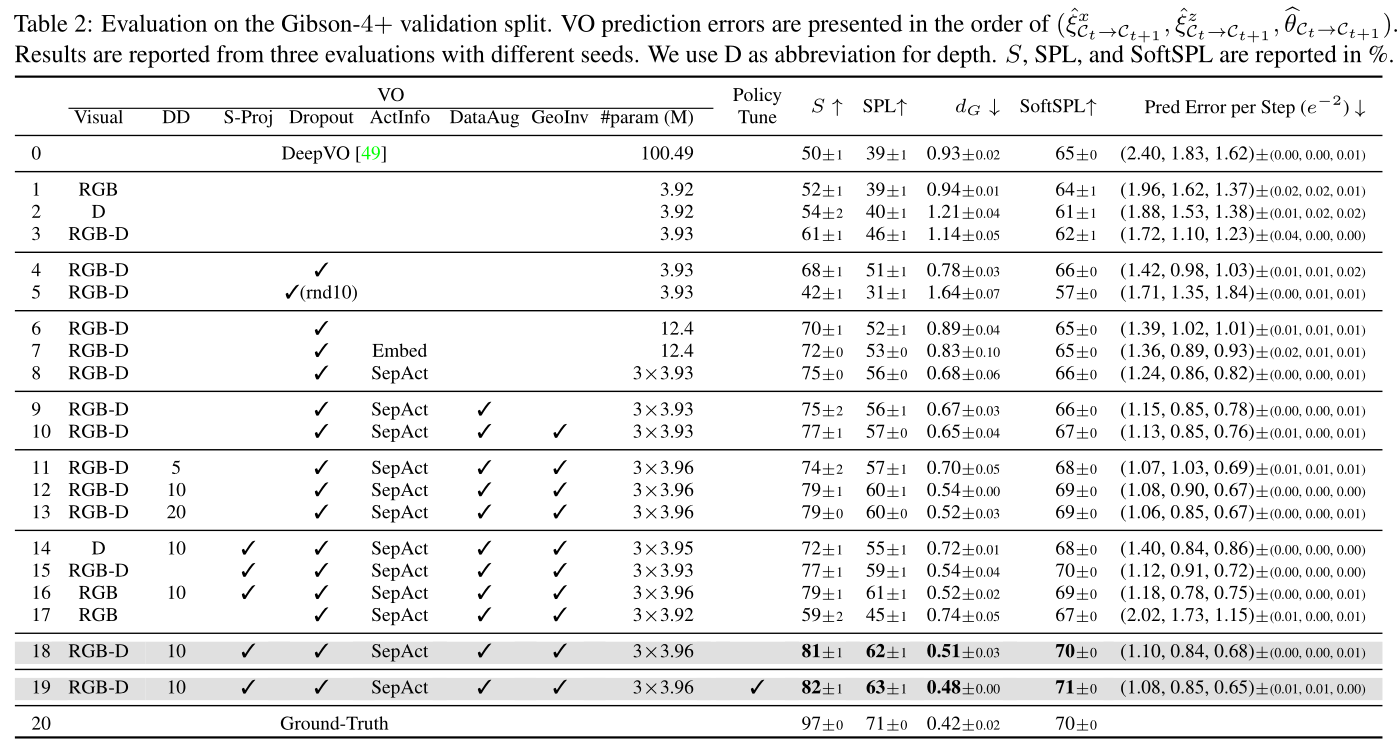
The Surprising Effectiveness of Visual Odometry Techniques for Embodied PointGoal Navigation 论文阅读
论文信息 标题:The Surprising Effectiveness of Visual Odometry Techniques for Embodied PointGoal Navigation 作者:Xiaoming Zhao, Harsh Agrawal 来源:ICCV 时间:2021 项目地址:https://xiaoming-zhao.github.io/projects/poin

美国AI初创企业Embodied获2200万美元A轮融资
【数据猿导读】Embodied拥有一支由科学家、工程师、艺术家和设计师组成的优秀团队,致力于开发先进的伴侣机器人,旨在为家庭和个人提供创新性的护理和健康服务,提高生活质量 编译 | 金又南 官网 | www.datayuan.cn 微信公众号ID | datayuancn 近日,位于美国加州的Embodied宣布已获得2200万美元A轮融资。本轮融资由Calibrate Ventures领
【具身智能综述1】A Survey of Embodied AI: From Simulators to Research Tasks
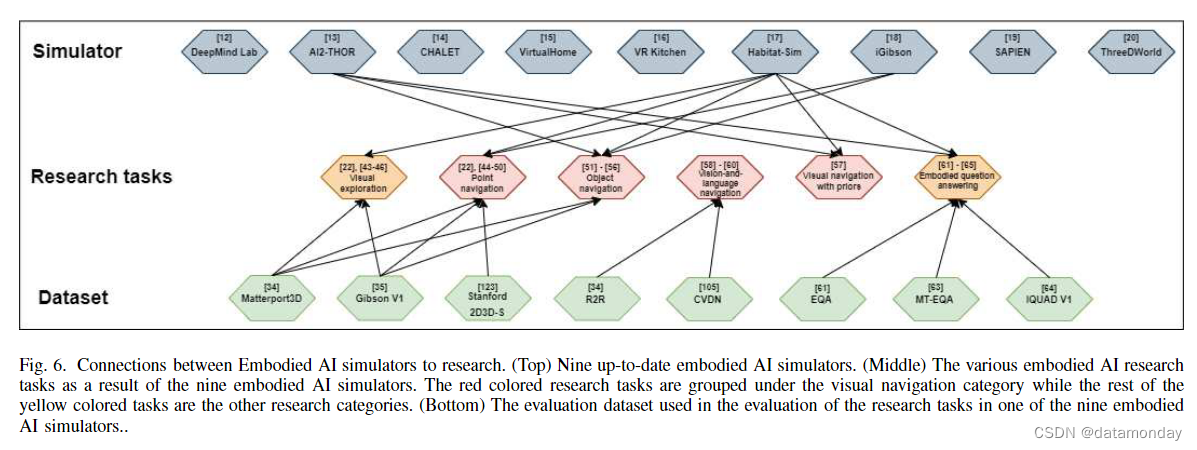
论文标题:A Survey of Embodied AI: From Simulators to Research Tasks 论文作者:Jiafei Duan, Samson Yu, Hui Li Tan, Hongyuan Zhu, Cheston Tan 论文原文:https://arxiv.org/abs/2103.04918 论文出处:IEEE Transactions on Emer
【具身智能模型1】PaLM-E: An Embodied Multimodal Language Model
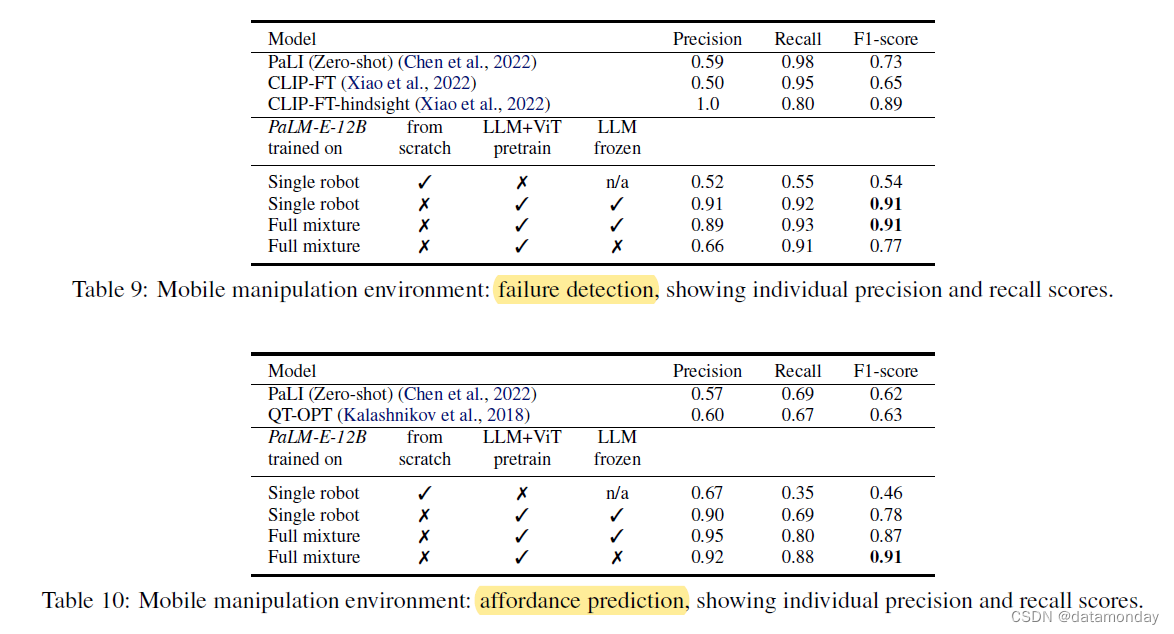
论文标题:PaLM-E: An Embodied Multimodal Language Model 论文作者:Danny Driess, Fei Xia, Mehdi S. M. Sajjadi, Corey Lynch, Aakanksha Chowdhery, Brian Ichter, Ayzaan Wahid, Jonathan Tompson, Quan Vuong, Tianhe

具身智能(Embodied AI)
前言 图灵奖得主、上海期智研究院院长姚期智认为,人工智能领域下一个挑战将是实现“具身通用人工智能”,即如何构建能够通过自我学习掌握各种技能并执行现实生活中的种种通用任务的高端机器人。清华大学计算机系教授张钹院士,也在某产业智能论坛上提出,随着基础模型的突破,通用智能机器人(具身智能)是未来的发展方向。 模型的好坏取决于数据和算力,以及算法,我们目前的数据源主要来自于各大龙

论文阅读:A Survey of Embodied AI: From Simulators toResearch Tasks
介绍 具身智能可粗略定义为,智能体(可以是生物或机械),通过与环境产生交互后,通过自身的学习,产生对于客观世界的理解和改造能力。具身智能假设,智能行为可以被具有对应形态的智能体通过适应环境的方式学习到。因此,地球上所有的生物,都可以说是具身智能。 但就目前而言,具身智能是将视觉、语言和推理等传统智能概念融入人工智能体中,以帮助解决虚拟环境中的人工智能问题。 具身智能模拟器 具身智能模