cs131专题

CS131学习笔记(lecture8)
讲义链接:http://vision.stanford.edu/teaching/cs131_fall1718/files/08_seam_carving.pdf 图像大小调整 截至上一节,对图像匹配的介绍暂时告一段落。本节将介绍在尽量少地改变图片观感情况下的尺寸调整(resizing)问题,即: 输入图像 I I I: m×nm×nm\times n; 输出图像 I′ I ′ I':

CS131学习笔记(lecture7)
讲义地址:http://vision.stanford.edu/teaching/cs131_fall1718/files/07_DoG_SIFT.pdf 上节说到,Harris检测器对于尺度变换下的关键点检测效果不理想,所以本节将关注一些在尺度变换下依然可以有效检测的方法。 尺度不变检测 从直觉上,我们在进行不同尺度下的特征检测时,需要选取范围不同的窗函数(以下以圆圈为例),即:对比例尺较小

CS131学习笔记(lecture6)
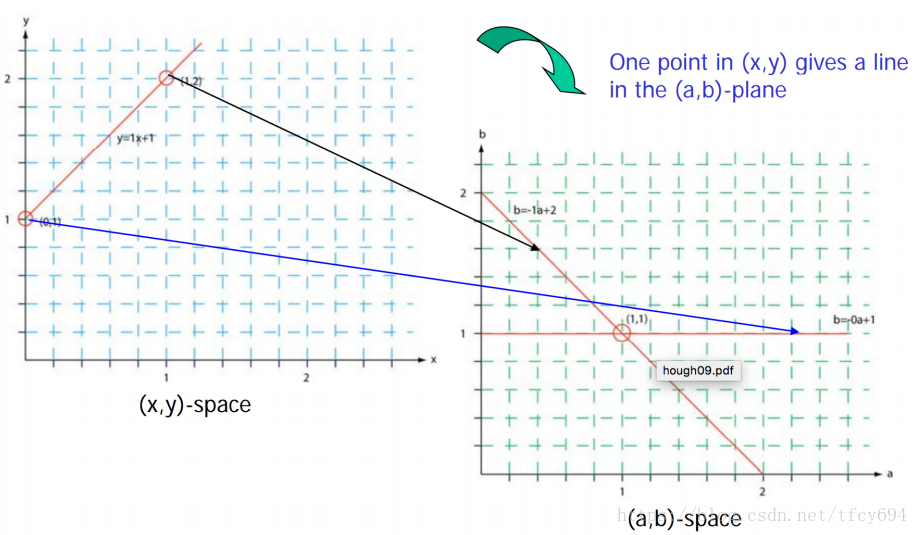
讲义地址:http://vision.stanford.edu/teaching/cs131_fall1718/files/06_ransac.pdf 本节内容可以看作是一种“自顶向下的介绍”。 用于边缘检测的一种模型匹配方法: random sample Consensus (RANSAC) 算法source:https://dl.acm.org/citation.cfm?id=358692
CS131学习笔记(lecture5)
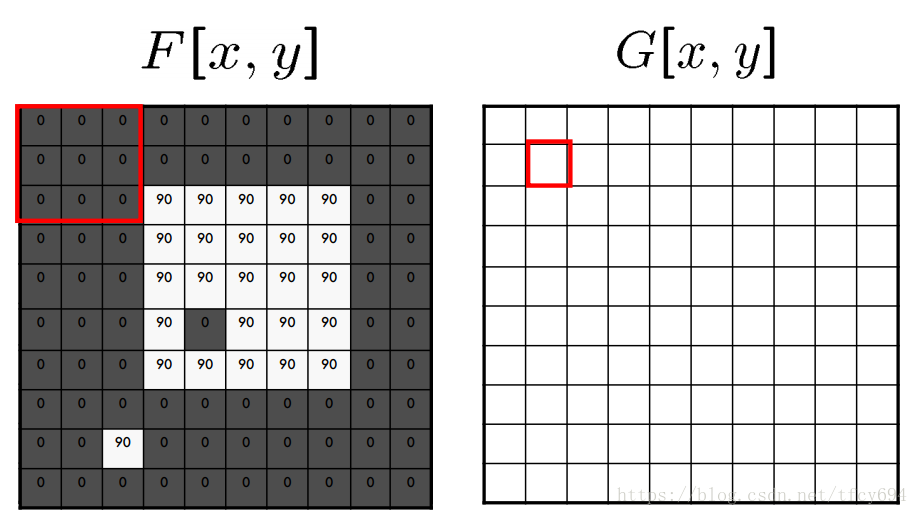
讲义链接:http://vision.stanford.edu/teaching/cs131_fall1718/files/05_edges.pdf 图像梯度(gradient) 由于图像中平面的截止、深度的截止以及图案的构成都是以边缘(edge)为基础的,所以边缘检测成为识别图像包含信息和重建几何观测的一个重要手段。我们不难想到,借助数学中的导数工具,即可在矩阵某一维度导数突变处获得图像边缘
CS131学习笔记(lecture4)
课程讲义:http://vision.stanford.edu/teaching/cs131_fall1718/files/04_filters.pdf 图像采样(sampling)和量化(quantization) 首先,自然界中的每一景象都是“continuous”,然而这在计算机的世界观中是不可接受的。所以必须把模拟信号进行采样和量化才能得到图像矩阵,当然了,这一过程产生误差和丢失信息也
![[CS131] Lecture 6 Edge Detection](https://bearly.oss-cn-hangzhou.aliyuncs.com/CS131/6.6.png)
[CS131] Lecture 6 Edge Detection
根据 Stanford CS131 课程写的笔记(大部分为 note 翻译),英语水平一般,如有错误请评论指正 Lecture 6 Edge Detection Edge Detection Edge Basic 图片上的边缘主要有四个可能的来源:不连续的表面(表面角度突然改变)、深度不连续(一个表面重叠在另一个上)、表面颜色不连续、光照不连续(明 / 暗)。从数学上来看,梯度大的位
CS131学习笔记(lecture8)
讲义链接:http://vision.stanford.edu/teaching/cs131_fall1718/files/08_seam_carving.pdf 图像大小调整 截至上一节,对图像匹配的介绍暂时告一段落。本节将介绍在尽量少地改变图片观感情况下的尺寸调整(resizing)问题,即: 输入图像 I I I: m×nm×nm\times n; 输出图像 I′ I ′ I':