coppeliasim专题
机械臂 CoppeliaSim Simulink联合仿真
实现机械臂在CoppeliaSim(以前称为V-REP)和Simulink上的联合仿真涉及多个步骤,包括环境设置、模型导入、通信配置、控制算法设计和测试调试。 前期准备 安装软件配置工作环境创建和配置CoppeliaSim场景 导入机械臂模型配置机械臂参数在Simulink中创建控制模型 创建新的Simulink模型添加和配置通信模块设计控制算法建立CoppeliaSim和Simulink之
ROS云课三分钟外传之CoppeliaSim_Edu_V4_1_0_Ubuntu16_04
三分钟热度试一试吧,走过路过不要错过。 参考之前: 从云课五分钟到一分钟之v-rep_pro_edu_v3_6_2-CSDN博客 git clone https://gitcode.net/ZhangRelay/v-rep_pro_edu_v3_6_2_ubuntu16_04.gittar -xf v-rep_pro_edu_v3_6_2_ubuntu16_04/V-REP_PRO_EDU_

CoppeliaSim Edu(原V-rep)入门三实验指南
Dummy对象和IKGroup的使用 实验目的 熟悉Dummy对象和IKGroup的使用,并用他们对UR10机器人进行逆运动学求解; 观察使用不同求解器、不同迭代步数下的逆解效果。 实验原理 利用雅可比矩阵将关节空间速度映射到直角坐标空间的性质可构造向量值函数: p = f ( q ) p = f(q) p=f(q) 而逆运动学问题即是求解方程: f ( q ) = p

CoppeliaSim学习笔记之CoppeliaSim Edu V4.1.0 + Ubuntu 16.04 + ROS Kinetic环境搭建与基础测试
文章目录 1. 环境搭建2. 基础测试3. 自定义消息/服务编译使用 1. 环境搭建 Ubuntu系统的安装在此不做介绍,网上一搜一箩筐。ROS Kinetic的安装直接参考wiki就行。CoppeliaSim 安装也比较简单,直接官网下载(以7月21日新鲜刚出炉的CoppeliaSim Edu V4.1.0 为例),具体版本根据用户而定,博主使用CoppeliaSim_
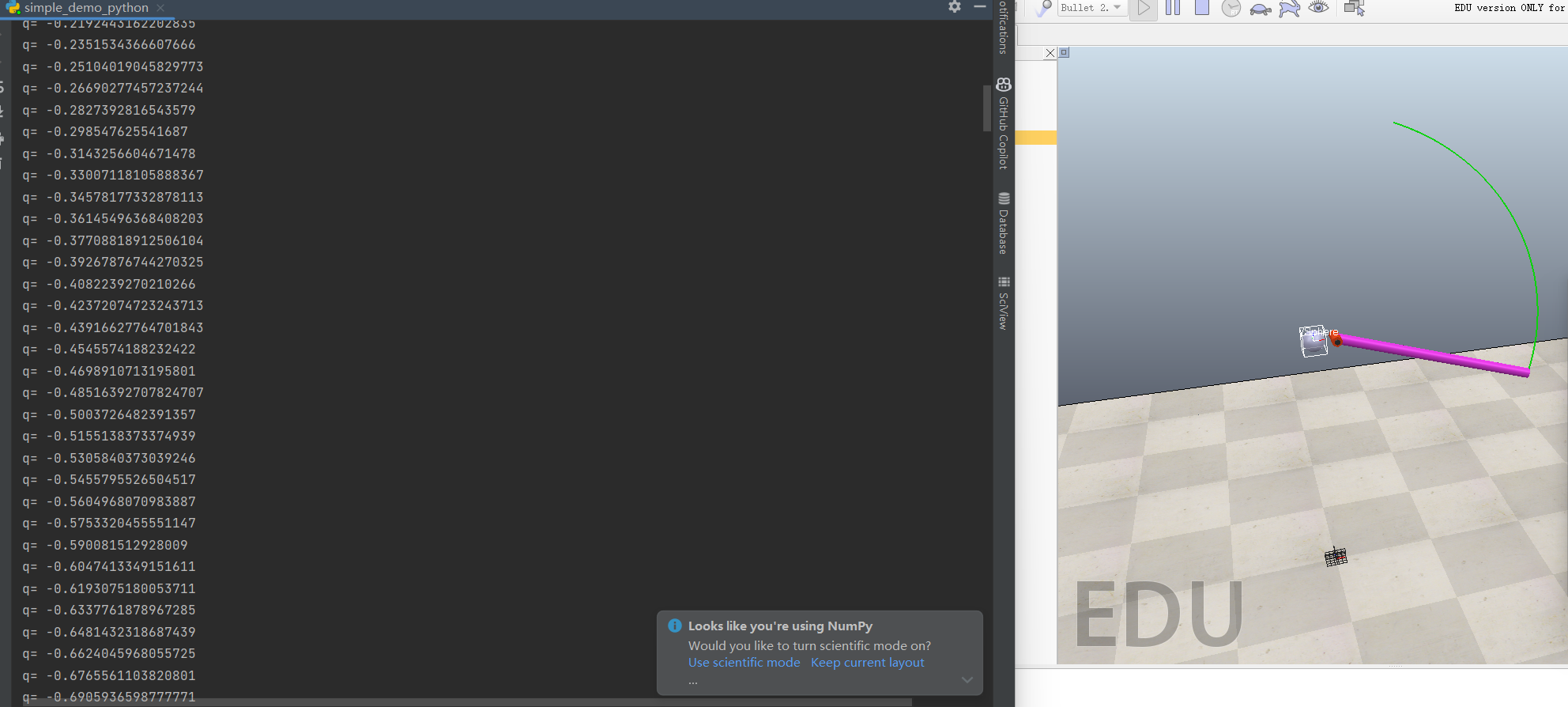
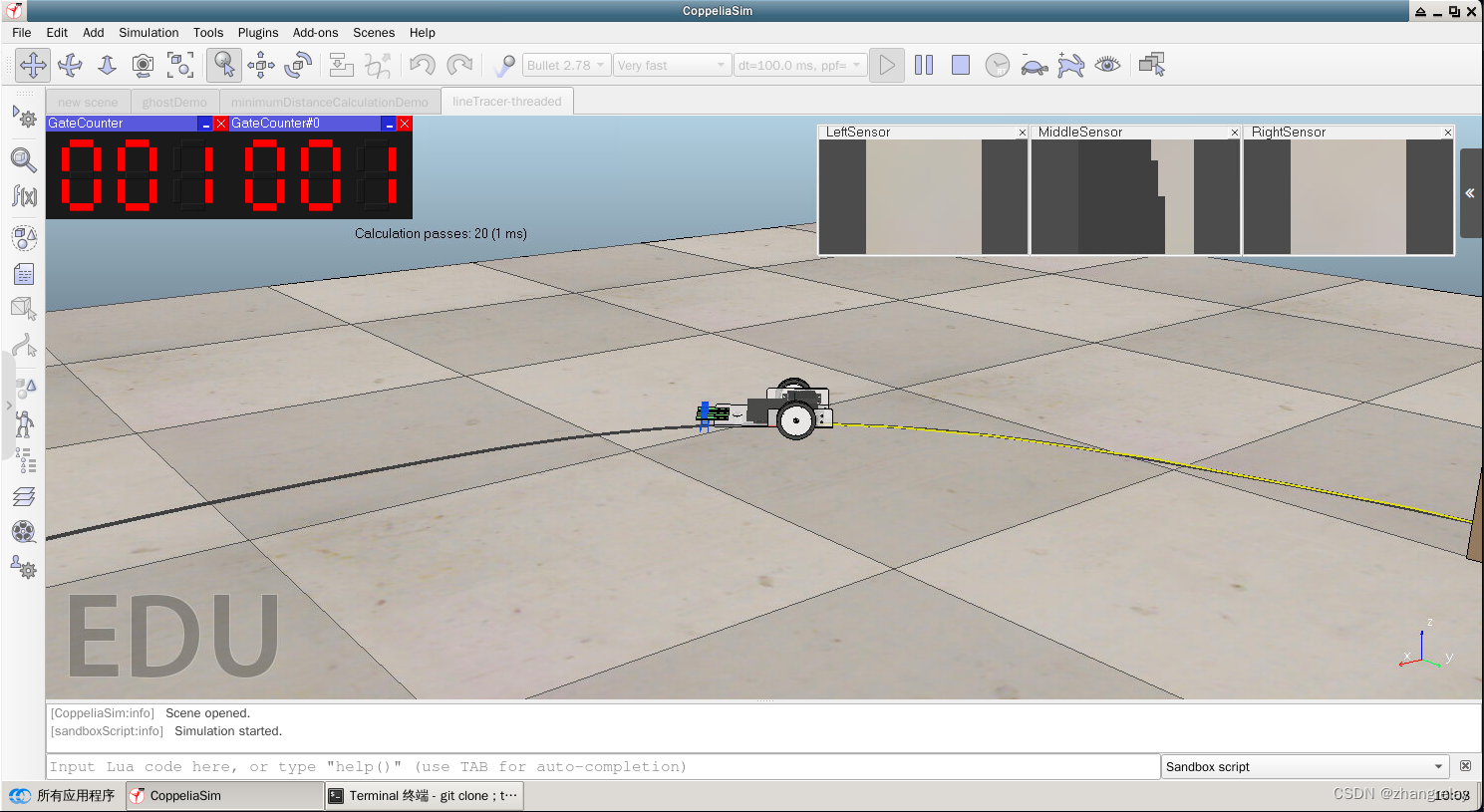
Coppeliasim倒立摆demo
首先需要将使用Python远程控制的文件导入到文件夹,核心是深蓝色的三个文件。 本版本为4.70,其文件所在位置如下图所示,需要注意的是,目前不支持Ubuntu22的远程api: 双击Sphere这一行的灰色文件,可以看到远程 simRemoteApi 的串口号为19998,当在Coppeliasim运行后,后台会发布该串口,可以利用Python进行远程控制。 import

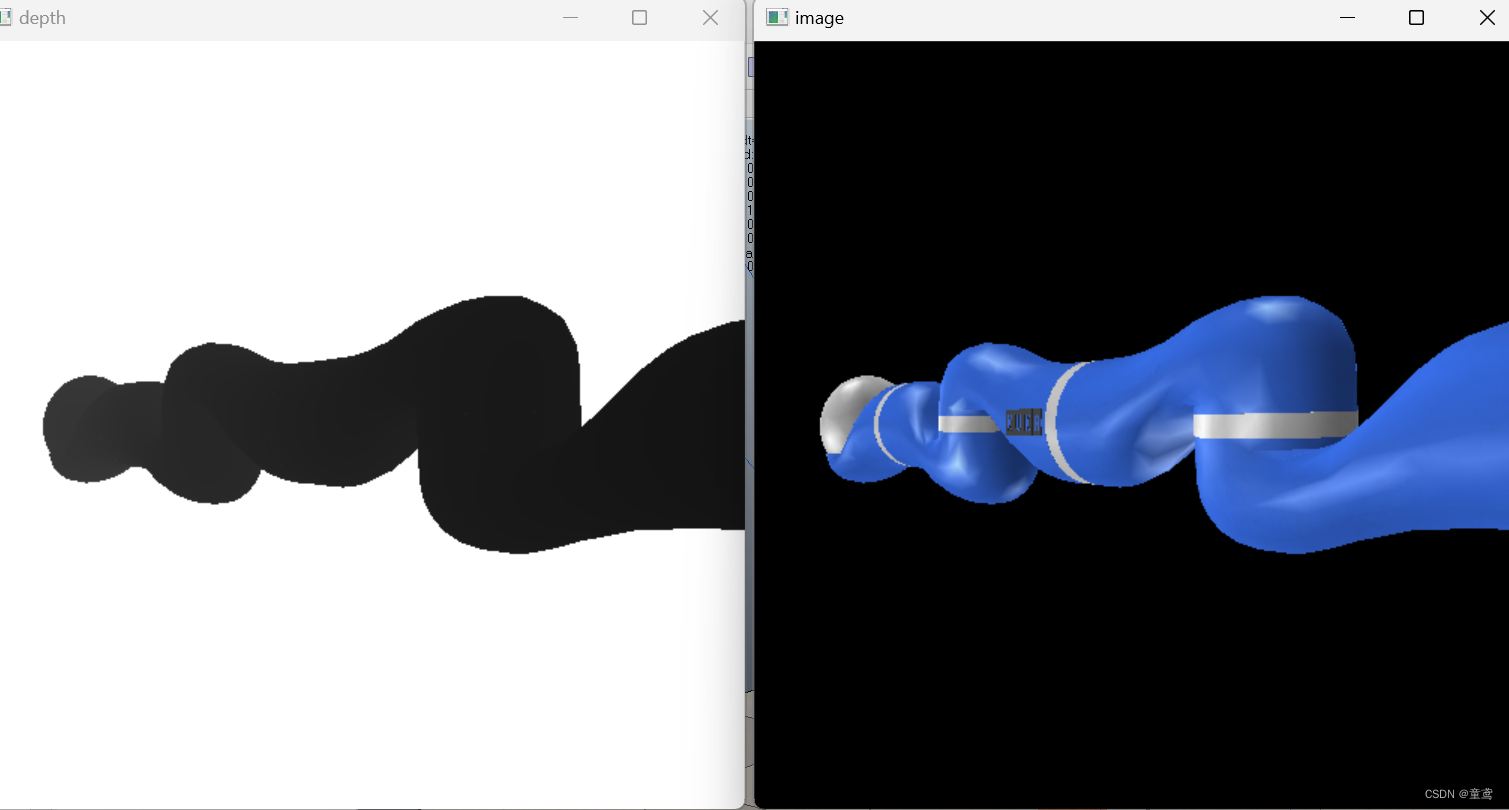
V-rep(CoppeliaSim)添加相机,与python联合仿真,并使用python读取V-rep中的RGB图与深度图
目录 前言在V-rep中构建场景建立python与V-rep通信 前言 本文主要介绍了如何使用python与V-rep联合仿真,并用OpenCV可视化V-rep中视觉传感器所能看到的 RGB图和深度图,效果图如下。 在V-rep中构建场景 本文使用的V-rep版本是3.5: 打开V-rep,并将任意一个目标(如机械臂)拖入到场景中。添加视觉传感器,在场景的空白处点击右键–

机械臂8---动力学仿真软件V-REP(CoppeliaSim)
V-REP已于2019年年底正式更名为CoppeliaSim。CoppeliaSim基本延含V-REP的功能,支持ROS2。 V-REP全称为virtual robot experimentation platform,为机器人仿真平台。其使用范围广泛,可以在Windows、MacOS、Linux系统上运行,支持六种编程方法,嵌入式脚本、插件、附加组件、ROS节点、远程客户端应用编程接口、Blu