cccorelib专题

CCCorelib 点云RANSAC拟合球体(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 RANSAC是一种随机参数估计算法。RANSAC从样本中随机抽选出一个样本子集,使用最小方差估计算法对这个子集计算模型参数,然后计算所有样本与该模型的偏差,再使用一个预先设定好的阈值与偏差比较,当偏差小于阈值时,该样本点属于模型内样本点(内点),否则就是外样本点(外点)。记录当前的内点的个数,然后重复上述的过程,直到
CCCorelib 点云空间采样(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 这个功能感觉也是很实用,它有点类似PCL中的VoxelGrid(体素)滤波器(在CC软件中,该方法为“Octree”中的“Resample”方法),不过其对点与点之间的最小距离有所约束,可以达到控制点间距的目的。虽然其做法可能与体素滤波器有些不同,但是达到的效果却是有些类似。这两种方法均可以在减少点云数据量的同时,还

CCCorelib 点云体素中心下采样(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 CloudCompare中的该方法类似于PCL中的ApproximateVoxelGrid方法,即根据我们输入的点云数据构建一个三维体素栅格并进行下采样从而达到滤波效果的方法,在这个过程中每一个体素所包含的点最终都会被体元的几何中心所代替,因此相较于原始数据,下采样之后的数据会有所偏差。 二、实现代码 //
CCCorelib 八叉树邻域点查询(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 这里使用CloudCompare特有的八叉树结构实现对指定范围内邻域点集的查询,其操作类似于PCL中八叉树的操作。 二、实现代码 // CloudCompare#include <CCCoreLib/PointCloudTpl.h>#include <CCCoreLib/GenericIndexedCl
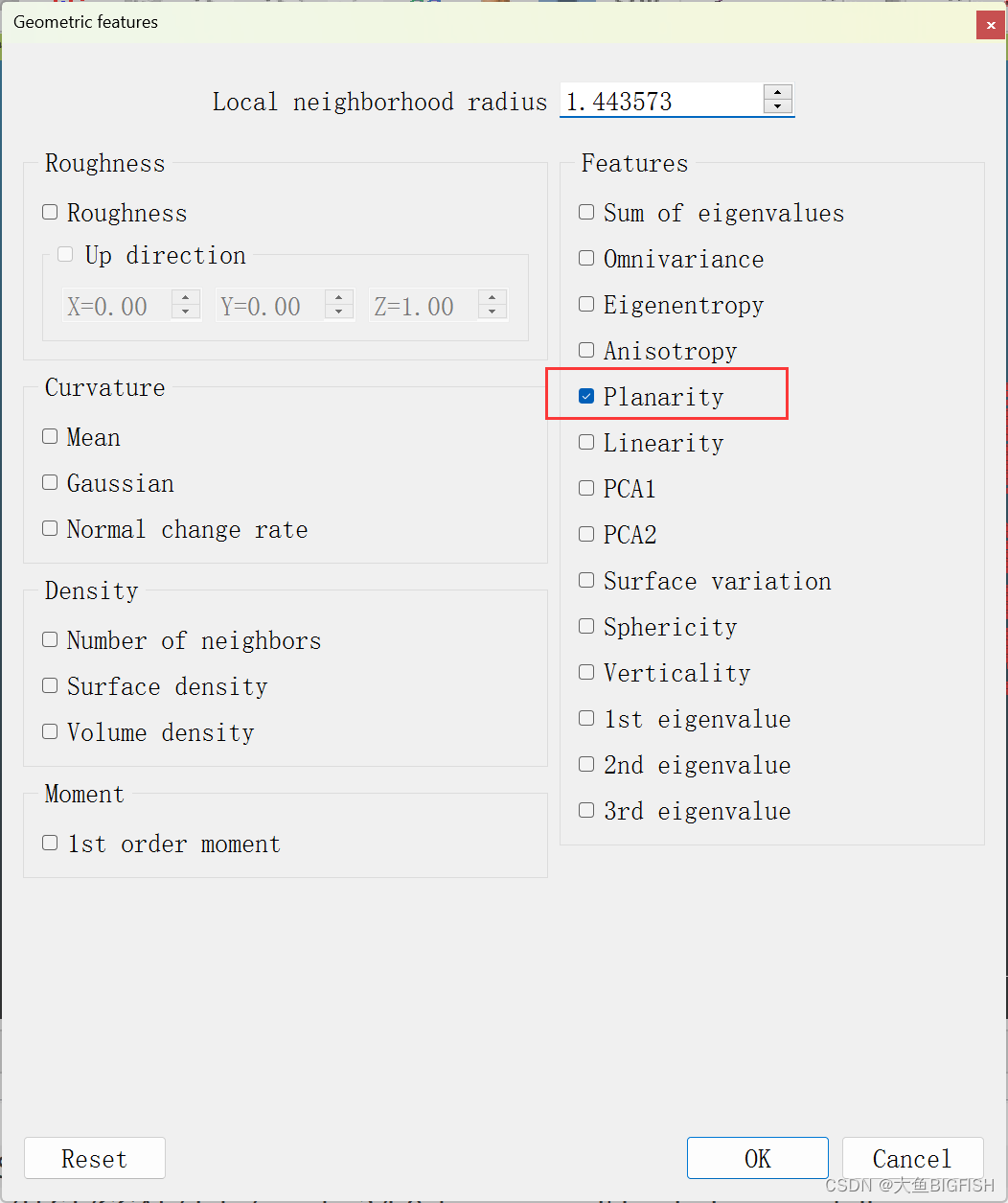
CCCorelib 点云平面特征(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 点云中存在这各种各样的几何特征,这里基于每个点的邻域协方差来获取该点的所具有的基础几何特征(如下图所示),这样的做法虽然不能很好的提取出点云中的各个部分,但却是可以作为一种数据预处理手段。 CloudCompare中也提供了计算这些特征的方法,这里我们使用其内置的算法获取我们所需要的特征值。