bolt专题

Storm的Spout和Bolt中的方法
一、Spout中的方法 1.open 当一个Task被初始化的时候会调用此open方法。一般都会在此方法中对发送Tuple的对象SpoutOutputCollector和配置对象TopologyContext初始化。 2.declareOutputFields 此方法用于声明当前Spout的Tuple发送流。Stream流的定义是通过OutputFieldsDecl

SplitFunctions (BOLT) - 优化阅读笔记
将函数拆分成更小的代码片段,从而执行更激进的代码段重排的优化 在文件 bolt/lib/Passes/SplitFunctions.cpp 相关选项释义默认-split-all-cold尽可能多的分离冷的基本块false-split-align-threshold对齐参数2-split-functions主要功能选项, 分离函数到代码片段false-split-threshold控制分离的片段

Unity开发备忘录000018:博尔特(BOLT)的安装与设置
一. 安装 将Bolt 1.4.0f3.unitypackage插件拖拽到Unity项目面板中的Assets中。 此时,会弹出Bolt的导入界面。 点击“全部”按钮,再点击“导入”按钮,则Bolt插件就被安装到Unity之中了。 此时,您应该在菜单栏处看到多了一个Tools菜单。如果没有Tools就用鼠标左键点击一下菜单栏的空白处,如果还没有就将当前的Unity工程关闭再打开。

Unity开发备忘录000017:Unity中的闪电侠——博尔特(BOLT)
提起博尔特(BOLT)好像地球人都知道,因为他是现今地球上跑得最快的人! 但我们今天要介绍的不是这位超人,而是Unity中的闪电侠——BOLT,一个官方推荐的Unity可视化编程插件,它能赋予艺术家、设计师和程序员创建游戏机制和交互系统的超能力,使您无需编写一行代码就可以创作出您的作品来,其创作速度惊人! BOLT为何如此强大?因为它选择了两种强大的图形类型来实现您的想法: 流程图:

奥比中光 Femto Bolt相机ROS配置
作者: Herman Ye @Auromix 测试环境: Ubuntu20.04/22.04 、ROS1 Noetic/ROS2 Humble、X86 PC/Jetson Orin、Kinect DK/Femto Bolt 更新日期: 2023/12/12 注1: @Auromix 是一个机器人爱好者开源组织。 注2: 由于笔者水平有限,以下内容可能存在事实性错误。 注3: 本文中直接引用各包官方
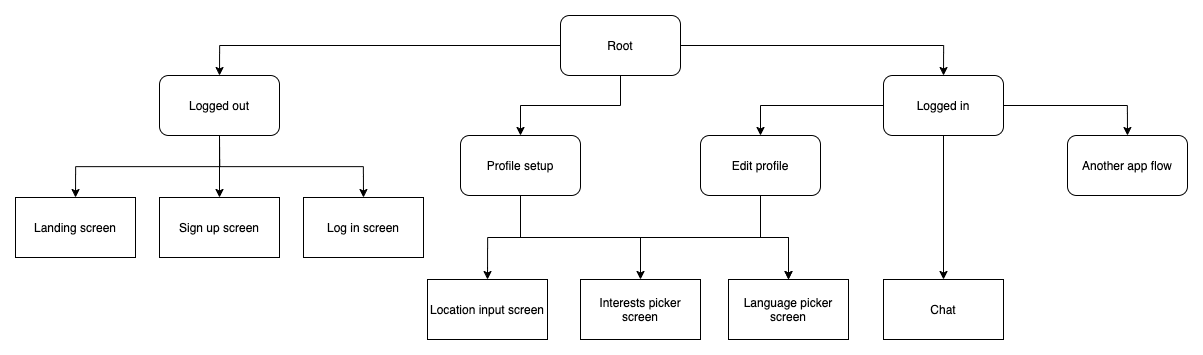
Bolt 的 Flutter 路由管理实践(页面解耦,流程控制、功能拓展等)
在各大移动开发框架(Android、iOS、Flutter、React Native…)中,路由管理始终是 UI 架构最具热议的话题之一。 一大原因就是应用程序的页面会 不可避免的多,我们可以使用 BLOC,MVP,MVI 等等模式将 UI 和业务逻辑合理分离实现良好的架构,但是如何将一个新页面合理地集成到现有的结构中还是一个比较大的难题。 Android 中,除了传统的 Intent / F
奥比中光 Femto Bolt相机ROS配置
机械臂手眼标定详解 作者: Herman Ye @Auromix 测试环境: Ubuntu20.04/22.04 、ROS1 Noetic/ROS2 Humble、X86 PC/Jetson Orin、Kinect DK/Femto Bolt 更新日期: 2023/12/12 注1: @Auromix 是一个机器人爱好者开源组织。 注2: 由于笔者水平有限,以下内容可能存在事实性错误。 注3: