bevdepth专题

四. 基于环视Camera的BEV感知算法-BEVDepth
目录 前言0. 简述1. 算法动机&开创性思路2. 主体结构3. 损失函数4. 性能对比总结下载链接参考 前言 自动驾驶之心推出的《国内首个BVE感知全栈系列学习教程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习下课程第四章——基于环视Camera的BEV感知算法,一起去学习下 BEVDepth 感知算法 课程大纲可以看下面的思维导图 0. 简述
BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection
BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection 相关论文摘要简介 AAAI2023 - BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection 相关论文 DETR3D:DETR3D:
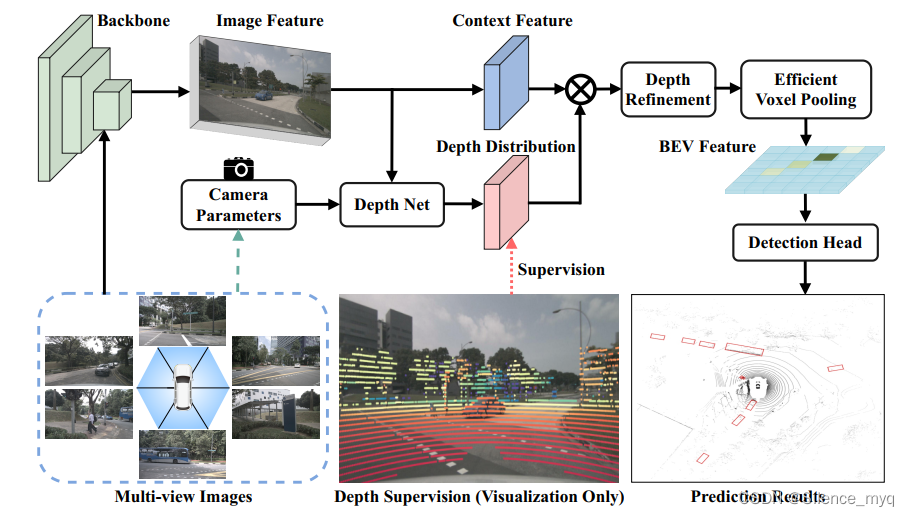
BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection 论文笔记
原文链接:https://arxiv.org/abs/2206.10092 1.引言 目前的图像3D目标检测方法在深度估计上的效果很差。基于深度3D检测器特点: 若无真实深度的监督,虽然最终的3D检测结果鼓励模型输出正确的深度,但要学习到精确的深度是很困难的;此外,理论上深度子网络应该根据相机内外参推断深度,但目前方法都没有这么做;深度估计后的视图转换子网络很低效,比不基于深