behaviortree专题

使用 TinyFSM 和 BehaviorTree.CPP 构建状态机与行为树示例
文章目录 0. 概述1. 有限状态机(FSM)原理状态机示例(FSM) 2. 行为树(BT)原理行为树示例(BT) 3. 结合FSM和BT项目结构4. 代码实现5. 总结6. 参考 0. 概述 在现代软件开发中,有限状态机(FSM)和行为树(BT)是两种常用的工具,用于实现复杂的逻辑控制和决策。本文将展示如何结合使用 TinyFSM 和 BehaviorTree.CPP 创建
成功安装拥有Groot的BehaviorTree.CPP
分享的BehaviorTree.CPP 3.8版本BehaviorTree.CPP-3.8https://download.csdn.net/download/Cathy121381314/87087392分享的Groot可用版本:Groot 现在时资源https://download.csdn.net/download/Cathy121381314/86988788安装教程(详细且包含报错问题及

BehaviorTree + Groot 18.04 ros 下安装(亲测可用)
1. 首先安装 BehaviorTree.CPP,我这里选的是# BehaviorTree.CPP 4.1版本的 使用 git clone下载 master 分支 2. 安装设计软件Groot 环境准备 首先你需要准备的是 CMake 3.2 依赖 sudo apt install qtbase5-dev libqt5svg5-dev libzmq3-dev libdw-dev
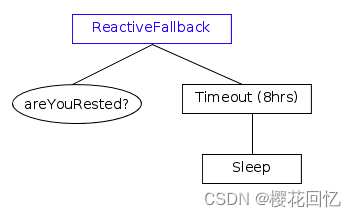
BehaviorTree.CPP行为树学习:ReactiveFallback
ReactiveFallback 在其他框架中,这一系列节点称为“选择器”或“优先级”。 他们的目的是尝试不同的策略,直到我们找到一个“有效”的策略。 目前框架提供两种节点: FallbackReactiveFallback 它们遵循以下规则 在tick第一个子节点之前,节点状态变为RUNNING如果一个子节点返回失败,fallback将会tick下一个子节点若最后一个子节点也返回失败