本文主要是介绍2203-简单点-ultralytics库解析-data模块,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
data模块
- overview布局
- \_\_init__.py
- from .base import BaseDataset
- \_\_all__
- annotator.py
- augment.py
- `class BaseTransform`
- `class Compose`
- `class BaseMixTransform`
- `class`
- 未完继续
overview布局
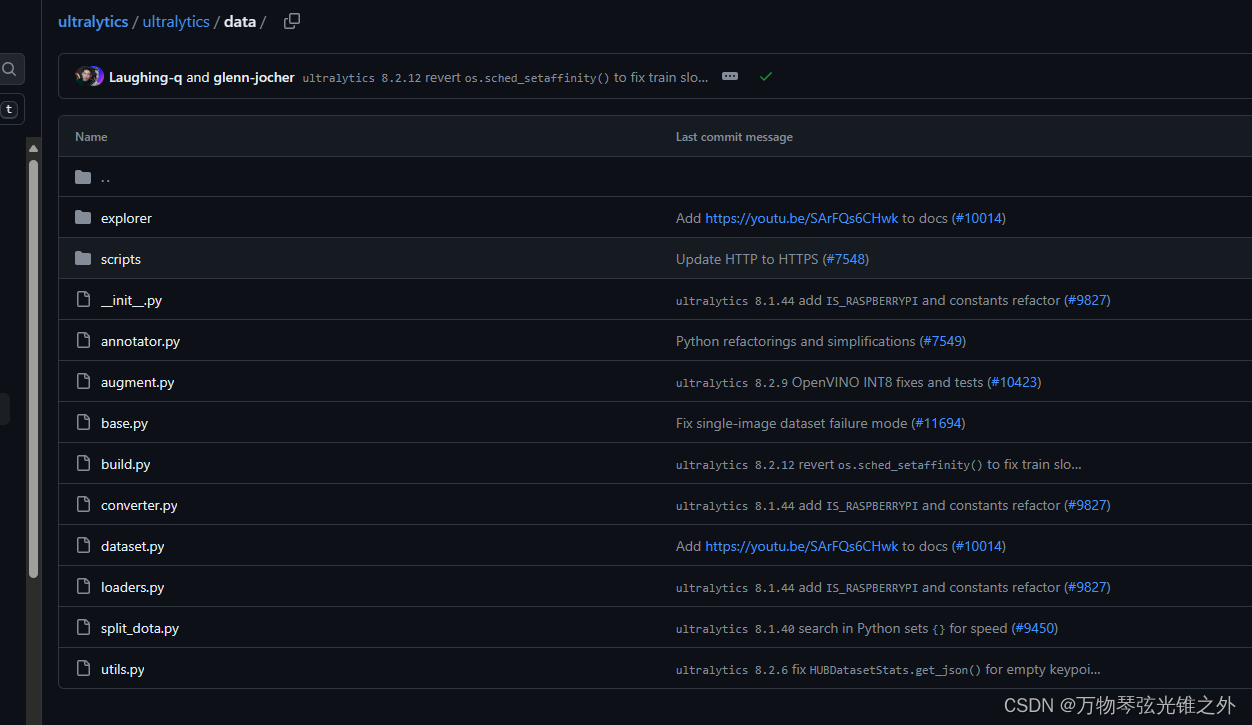
从上往下解析
__init__.py
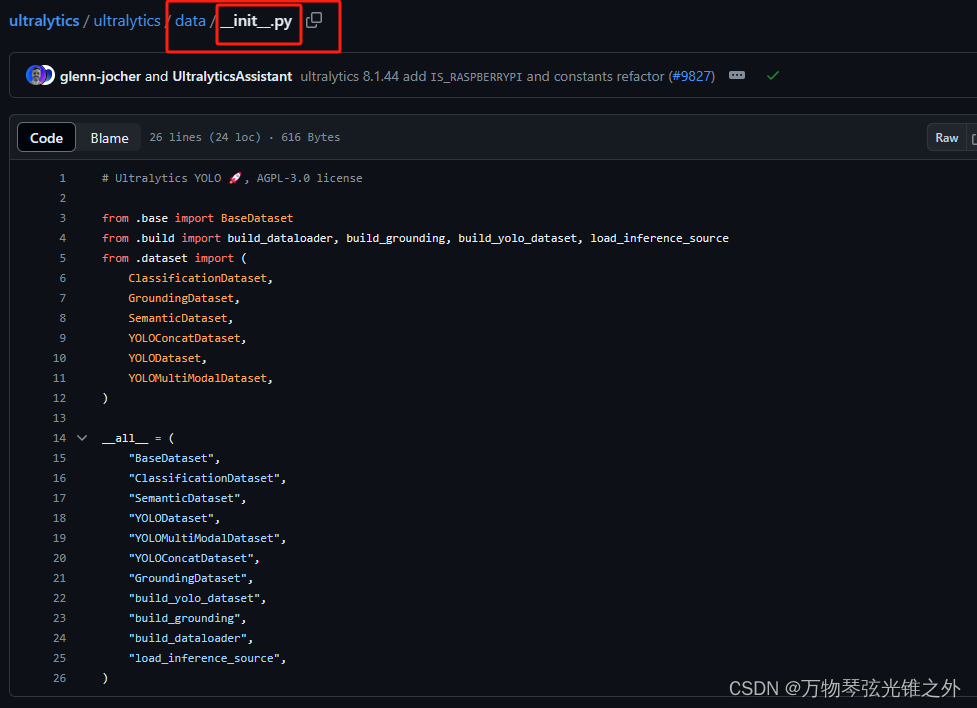
from .base import BaseDataset
__init__.py 文件在 Python 中扮演着重要的角色,它是 Python 包结构的一部分。
当一个目录包含 __init__.py 文件时,Python 会将这个目录视为一个包,允许你导入其中的模块和类。这个文件的目的是告诉 Python 解释器,目录内的内容是一个可导入的模块集合,也就是一个包。
在这个特定的例子中,__init__.py 文件是 ultralytics 库(假设是 ultralytics 包)的一部分,它导出了 base.py、build.py 和 dataset.py 中的一些关键类和函数。通过这种方式,用户可以直接从 ultralytics 包中导入这些导出的类和函数,而不需要知道它们在哪个具体的模块里。
例如,用户可以这样导入和使用这些类和函数:
from ultralytics import BaseDataset, YOLODataset, build_yolo_datasetdataset = BaseDataset()
yolo_dataset = YOLODataset()
dataloader = build_yolo_dataset(dataset)
这种组织方式提高了代码的可读性和可维护性,因为用户只需要记住在包级别上可用的接口,而不是每个单独模块的细节。同时,__init__.py 也可以用来执行一些初始化逻辑,比如设置配置、注册自定义类型等。
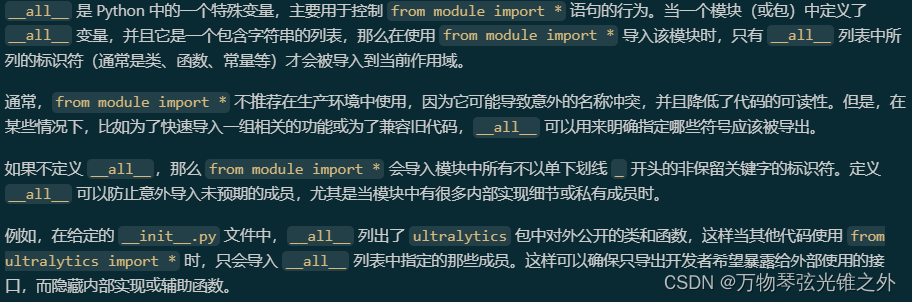
__all__
annotator.py
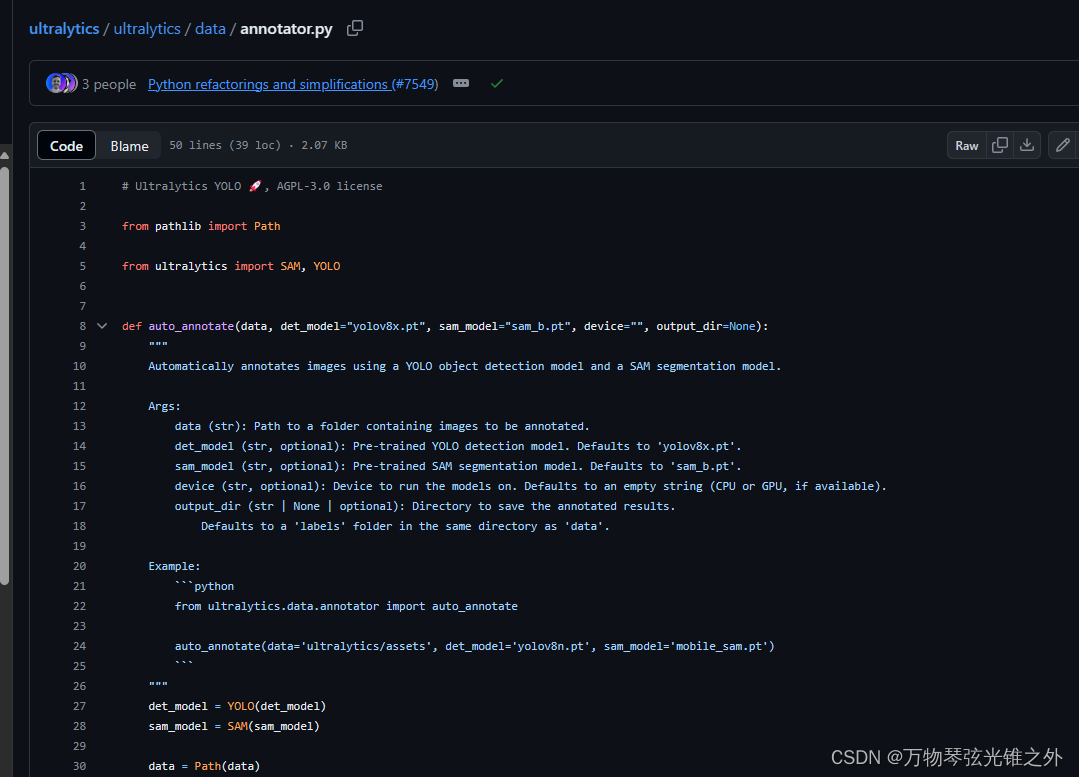
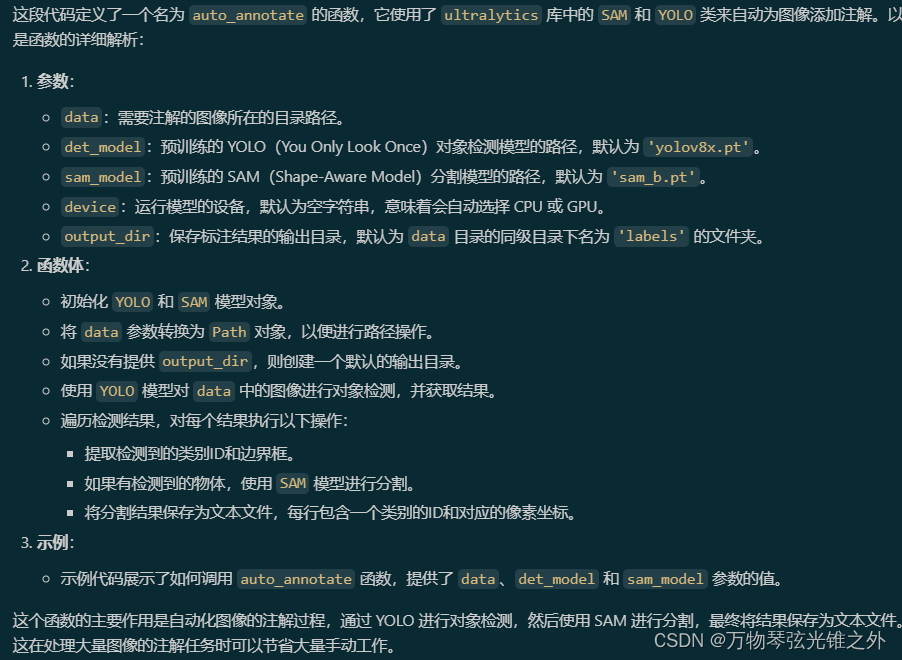
# Ultralytics YOLO 🚀, AGPL-3.0 licensefrom pathlib import Pathfrom ultralytics import SAM, YOLOdef auto_annotate(data, det_model="yolov8x.pt", sam_model="sam_b.pt", device="", output_dir=None):"""Automatically annotates images using a YOLO object detection model and a SAM segmentation model.Args:data (str): Path to a folder containing images to be annotated.det_model (str, optional): Pre-trained YOLO detection model. Defaults to 'yolov8x.pt'.sam_model (str, optional): Pre-trained SAM segmentation model. Defaults to 'sam_b.pt'.device (str, optional): Device to run the models on. Defaults to an empty string (CPU or GPU, if available).output_dir (str | None | optional): Directory to save the annotated results.Defaults to a 'labels' folder in the same directory as 'data'.Example:```pythonfrom ultralytics.data.annotator import auto_annotateauto_annotate(data='ultralytics/assets', det_model='yolov8n.pt', sam_model='mobile_sam.pt')```"""det_model = YOLO(det_model)sam_model = SAM(sam_model)data = Path(data)if not output_dir:output_dir = data.parent / f"{data.stem}_auto_annotate_labels"Path(output_dir).mkdir(exist_ok=True, parents=True)det_results = det_model(data, stream=True, device=device)for result in det_results:class_ids = result.boxes.cls.int().tolist() # noqaif len(class_ids):boxes = result.boxes.xyxy # Boxes object for bbox outputssam_results = sam_model(result.orig_img, bboxes=boxes, verbose=False, save=False, device=device)segments = sam_results[0].masks.xyn # noqawith open(f"{Path(output_dir) / Path(result.path).stem}.txt", "w") as f:for i in range(len(segments)):s = segments[i]if len(s) == 0:continuesegment = map(str, segments[i].reshape(-1).tolist())f.write(f"{class_ids[i]} " + " ".join(segment) + "\n")
augment.py
数据增强
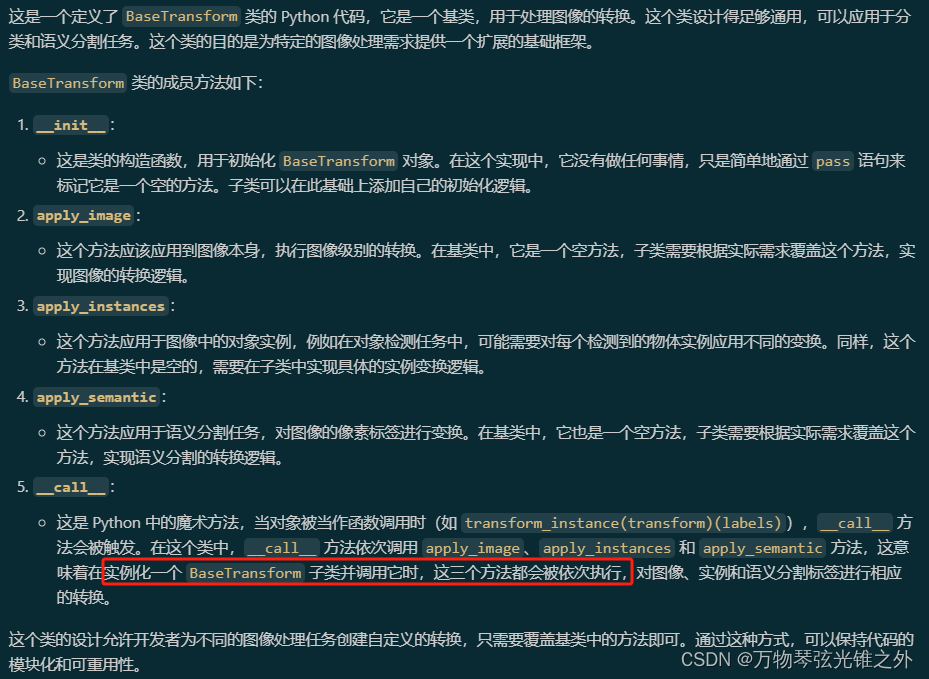
class BaseTransform
# TODO: we might need a BaseTransform to make all these augments be compatible with both classification and semantic
class BaseTransform:"""Base class for image transformations.This is a generic transformation class that can be extended for specific image processing needs.The class is designed to be compatible with both classification and semantic segmentation tasks.Methods:__init__: Initializes the BaseTransform object.apply_image: Applies image transformation to labels.apply_instances: Applies transformations to object instances in labels.apply_semantic: Applies semantic segmentation to an image.__call__: Applies all label transformations to an image, instances, and semantic masks."""def __init__(self) -> None:"""Initializes the BaseTransform object."""passdef apply_image(self, labels):"""Applies image transformations to labels."""passdef apply_instances(self, labels):"""Applies transformations to object instances in labels."""passdef apply_semantic(self, labels):"""Applies semantic segmentation to an image."""passdef __call__(self, labels):"""Applies all label transformations to an image, instances, and semantic masks."""self.apply_image(labels)self.apply_instances(labels)self.apply_semantic(labels)
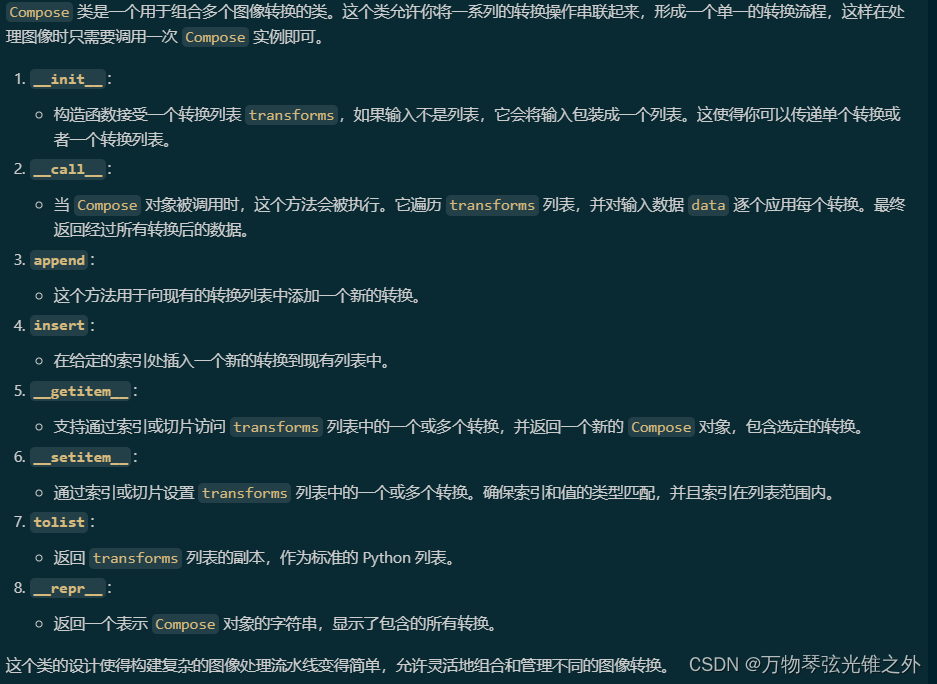
class Compose
class Compose:"""Class for composing multiple image transformations."""def __init__(self, transforms):"""Initializes the Compose object with a list of transforms."""self.transforms = transforms if isinstance(transforms, list) else [transforms]def __call__(self, data):"""Applies a series of transformations to input data."""for t in self.transforms:data = t(data)return datadef append(self, transform):"""Appends a new transform to the existing list of transforms."""self.transforms.append(transform)def insert(self, index, transform):"""Inserts a new transform to the existing list of transforms."""self.transforms.insert(index, transform)def __getitem__(self, index: Union[list, int]) -> "Compose":"""Retrieve a specific transform or a set of transforms using indexing."""assert isinstance(index, (int, list)), f"The indices should be either list or int type but got {type(index)}"index = [index] if isinstance(index, int) else indexreturn Compose([self.transforms[i] for i in index])def __setitem__(self, index: Union[list, int], value: Union[list, int]) -> None:"""Retrieve a specific transform or a set of transforms using indexing."""assert isinstance(index, (int, list)), f"The indices should be either list or int type but got {type(index)}"if isinstance(index, list):assert isinstance(value, list), f"The indices should be the same type as values, but got {type(index)} and {type(value)}"if isinstance(index, int):index, value = [index], [value]for i, v in zip(index, value):assert i < len(self.transforms), f"list index {i} out of range {len(self.transforms)}."self.transforms[i] = vdef tolist(self):"""Converts the list of transforms to a standard Python list."""return self.transformsdef __repr__(self):"""Returns a string representation of the object."""return f"{self.__class__.__name__}({', '.join([f'{t}' for t in self.transforms])})"
class BaseMixTransform
class BaseMixTransform:"""Class for base mix (MixUp/Mosaic) transformations.This implementation is from mmyolo."""def __init__(self, dataset, pre_transform=None, p=0.0) -> None:"""Initializes the BaseMixTransform object with dataset, pre_transform, and probability."""self.dataset = datasetself.pre_transform = pre_transformself.p = pdef __call__(self, labels):"""Applies pre-processing transforms and mixup/mosaic transforms to labels data."""if random.uniform(0, 1) > self.p:return labels# Get index of one or three other imagesindexes = self.get_indexes()if isinstance(indexes, int):indexes = [indexes]# Get images information will be used for Mosaic or MixUpmix_labels = [self.dataset.get_image_and_label(i) for i in indexes]if self.pre_transform is not None:for i, data in enumerate(mix_labels):mix_labels[i] = self.pre_transform(data)labels["mix_labels"] = mix_labels# Update cls and textslabels = self._update_label_text(labels)# Mosaic or MixUplabels = self._mix_transform(labels)labels.pop("mix_labels", None)return labelsdef _mix_transform(self, labels):"""Applies MixUp or Mosaic augmentation to the label dictionary."""raise NotImplementedErrordef get_indexes(self):"""Gets a list of shuffled indexes for mosaic augmentation."""raise NotImplementedErrordef _update_label_text(self, labels):"""Update label text."""if "texts" not in labels:return labelsmix_texts = sum([labels["texts"]] + [x["texts"] for x in labels["mix_labels"]], [])mix_texts = list({tuple(x) for x in mix_texts})text2id = {text: i for i, text in enumerate(mix_texts)}for label in [labels] + labels["mix_labels"]:for i, cls in enumerate(label["cls"].squeeze(-1).tolist()):text = label["texts"][int(cls)]label["cls"][i] = text2id[tuple(text)]label["texts"] = mix_textsreturn labels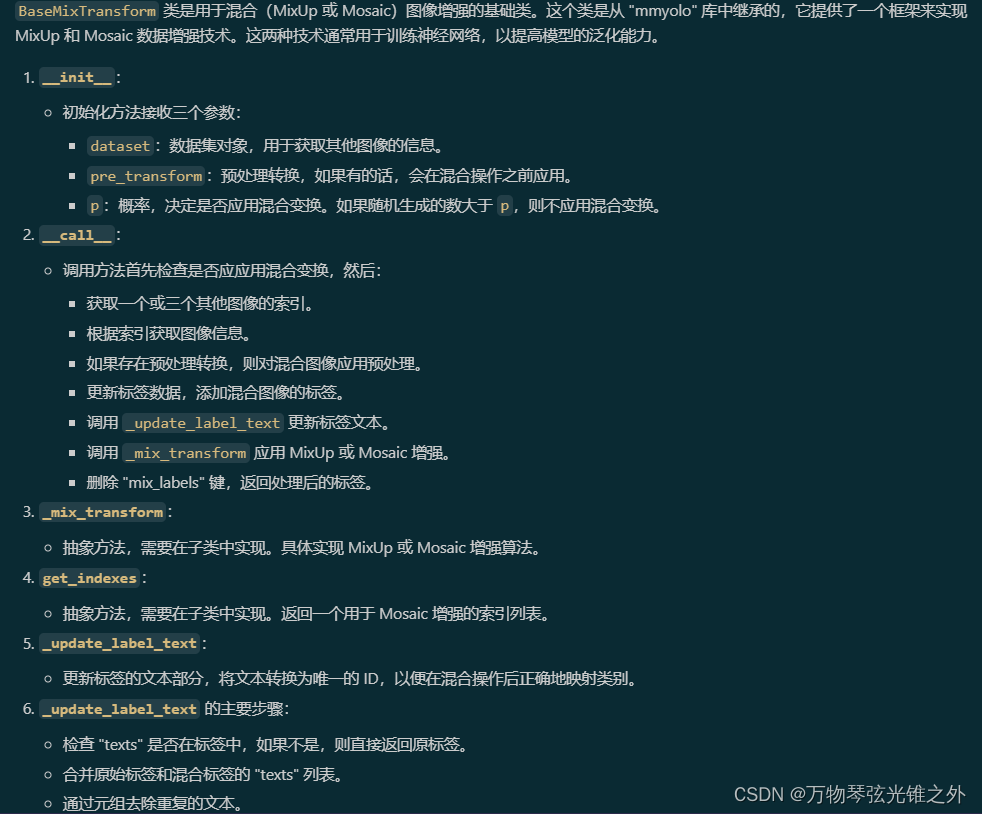

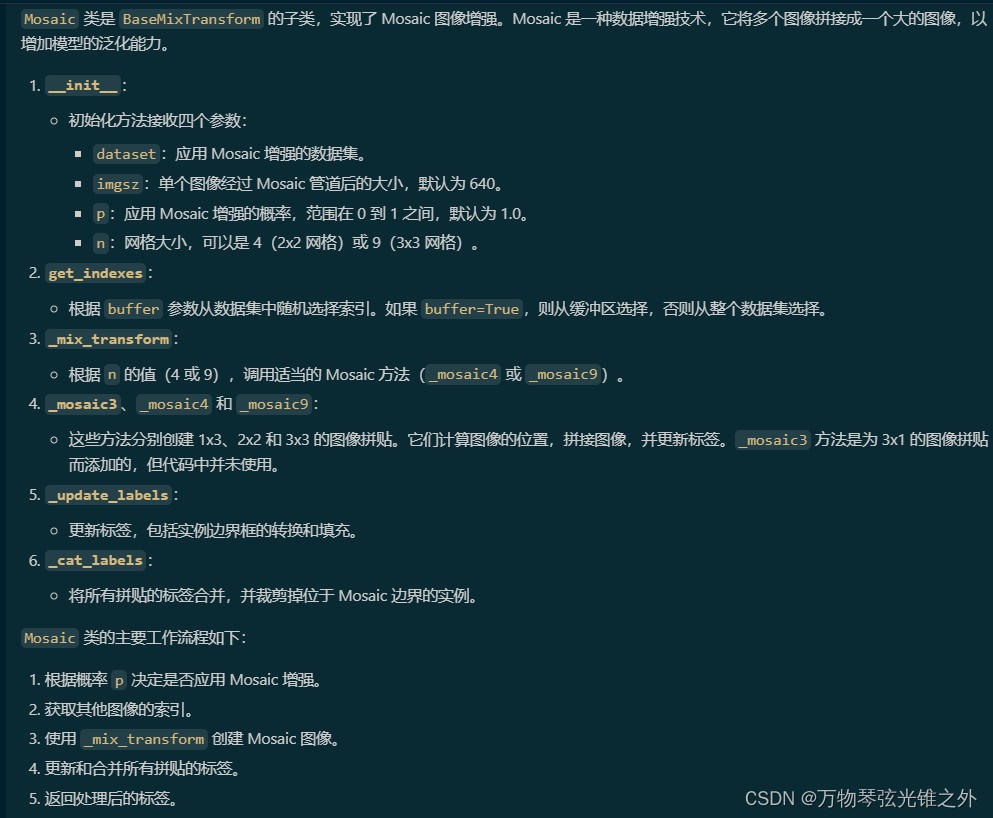
class
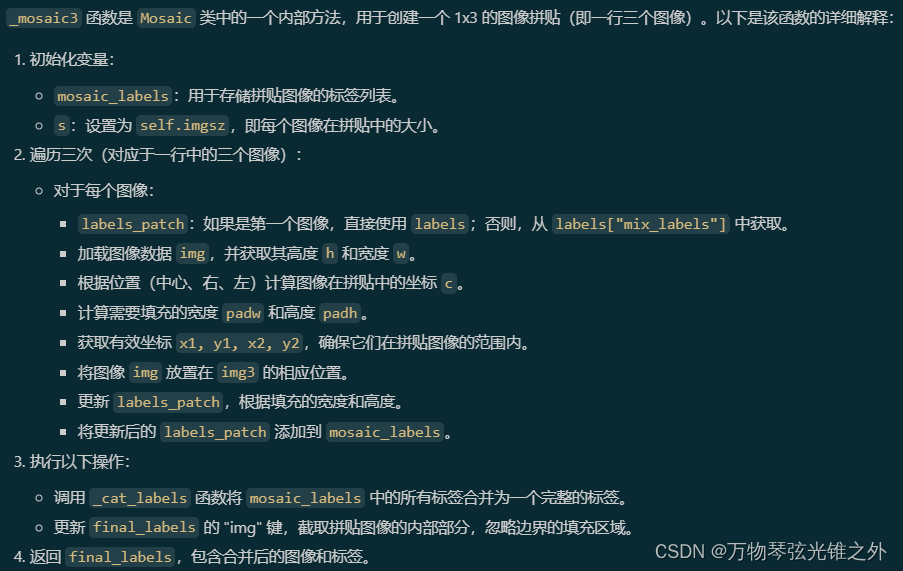
class Mosaic(BaseMixTransform):"""Mosaic augmentation.This class performs mosaic augmentation by combining multiple (4 or 9) images into a single mosaic image.The augmentation is applied to a dataset with a given probability.Attributes:dataset: The dataset on which the mosaic augmentation is applied.imgsz (int, optional): Image size (height and width) after mosaic pipeline of a single image. Default to 640.p (float, optional): Probability of applying the mosaic augmentation. Must be in the range 0-1. Default to 1.0.n (int, optional): The grid size, either 4 (for 2x2) or 9 (for 3x3)."""def __init__(self, dataset, imgsz=640, p=1.0, n=4):"""Initializes the object with a dataset, image size, probability, and border."""assert 0 <= p <= 1.0, f"The probability should be in range [0, 1], but got {p}."assert n in {4, 9}, "grid must be equal to 4 or 9."super().__init__(dataset=dataset, p=p)self.dataset = datasetself.imgsz = imgszself.border = (-imgsz // 2, -imgsz // 2) # width, heightself.n = ndef get_indexes(self, buffer=True):"""Return a list of random indexes from the dataset."""if buffer: # select images from bufferreturn random.choices(list(self.dataset.buffer), k=self.n - 1)else: # select any imagesreturn [random.randint(0, len(self.dataset) - 1) for _ in range(self.n - 1)]def _mix_transform(self, labels):"""Apply mixup transformation to the input image and labels."""assert labels.get("rect_shape", None) is None, "rect and mosaic are mutually exclusive."assert len(labels.get("mix_labels", [])), "There are no other images for mosaic augment."return (self._mosaic3(labels) if self.n == 3 else self._mosaic4(labels) if self.n == 4 else self._mosaic9(labels)) # This code is modified for mosaic3 method.def _mosaic3(self, labels):"""Create a 1x3 image mosaic."""mosaic_labels = []s = self.imgszfor i in range(3):labels_patch = labels if i == 0 else labels["mix_labels"][i - 1]# Load imageimg = labels_patch["img"]h, w = labels_patch.pop("resized_shape")# Place img in img3if i == 0: # centerimg3 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 3 tilesh0, w0 = h, wc = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinateselif i == 1: # rightc = s + w0, s, s + w0 + w, s + helif i == 2: # leftc = s - w, s + h0 - h, s, s + h0padw, padh = c[:2]x1, y1, x2, y2 = (max(x, 0) for x in c) # allocate coordsimg3[y1:y2, x1:x2] = img[y1 - padh :, x1 - padw :] # img3[ymin:ymax, xmin:xmax]# hp, wp = h, w # height, width previous for next iteration# Labels assuming imgsz*2 mosaic sizelabels_patch = self._update_labels(labels_patch, padw + self.border[0], padh + self.border[1])mosaic_labels.append(labels_patch)final_labels = self._cat_labels(mosaic_labels)final_labels["img"] = img3[-self.border[0] : self.border[0], -self.border[1] : self.border[1]]return final_labelsdef _mosaic4(self, labels):"""Create a 2x2 image mosaic."""mosaic_labels = []s = self.imgszyc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.border) # mosaic center x, yfor i in range(4):labels_patch = labels if i == 0 else labels["mix_labels"][i - 1]# Load imageimg = labels_patch["img"]h, w = labels_patch.pop("resized_shape")# Place img in img4if i == 0: # top leftimg4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tilesx1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)elif i == 1: # top rightx1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), ycx1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), helif i == 2: # bottom leftx1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)elif i == 3: # bottom rightx1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]padw = x1a - x1bpadh = y1a - y1blabels_patch = self._update_labels(labels_patch, padw, padh)mosaic_labels.append(labels_patch)final_labels = self._cat_labels(mosaic_labels)final_labels["img"] = img4return final_labelsdef _mosaic9(self, labels):"""Create a 3x3 image mosaic."""mosaic_labels = []s = self.imgszhp, wp = -1, -1 # height, width previousfor i in range(9):labels_patch = labels if i == 0 else labels["mix_labels"][i - 1]# Load imageimg = labels_patch["img"]h, w = labels_patch.pop("resized_shape")# Place img in img9if i == 0: # centerimg9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tilesh0, w0 = h, wc = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinateselif i == 1: # topc = s, s - h, s + w, selif i == 2: # top rightc = s + wp, s - h, s + wp + w, selif i == 3: # rightc = s + w0, s, s + w0 + w, s + helif i == 4: # bottom rightc = s + w0, s + hp, s + w0 + w, s + hp + helif i == 5: # bottomc = s + w0 - w, s + h0, s + w0, s + h0 + helif i == 6: # bottom leftc = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + helif i == 7: # leftc = s - w, s + h0 - h, s, s + h0elif i == 8: # top leftc = s - w, s + h0 - hp - h, s, s + h0 - hppadw, padh = c[:2]x1, y1, x2, y2 = (max(x, 0) for x in c) # allocate coords# Imageimg9[y1:y2, x1:x2] = img[y1 - padh :, x1 - padw :] # img9[ymin:ymax, xmin:xmax]hp, wp = h, w # height, width previous for next iteration# Labels assuming imgsz*2 mosaic sizelabels_patch = self._update_labels(labels_patch, padw + self.border[0], padh + self.border[1])mosaic_labels.append(labels_patch)final_labels = self._cat_labels(mosaic_labels)final_labels["img"] = img9[-self.border[0] : self.border[0], -self.border[1] : self.border[1]]return final_labels@staticmethoddef _update_labels(labels, padw, padh):"""Update labels."""nh, nw = labels["img"].shape[:2]labels["instances"].convert_bbox(format="xyxy")labels["instances"].denormalize(nw, nh)labels["instances"].add_padding(padw, padh)return labelsdef _cat_labels(self, mosaic_labels):"""Return labels with mosaic border instances clipped."""if len(mosaic_labels) == 0:return {}cls = []instances = []imgsz = self.imgsz * 2 # mosaic imgszfor labels in mosaic_labels:cls.append(labels["cls"])instances.append(labels["instances"])# Final labelsfinal_labels = {"im_file": mosaic_labels[0]["im_file"],"ori_shape": mosaic_labels[0]["ori_shape"],"resized_shape": (imgsz, imgsz),"cls": np.concatenate(cls, 0),"instances": Instances.concatenate(instances, axis=0),"mosaic_border": self.border,}final_labels["instances"].clip(imgsz, imgsz)good = final_labels["instances"].remove_zero_area_boxes()final_labels["cls"] = final_labels["cls"][good]if "texts" in mosaic_labels[0]:final_labels["texts"] = mosaic_labels[0]["texts"]return final_labels
具体介绍一下_mosaic3
未完继续
这篇关于2203-简单点-ultralytics库解析-data模块的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



