本文主要是介绍【STM32+HAL】微秒级延时函数汇总,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、调用Arduino中的micros函数
1、micros.c
#include "micros.h"__STATIC_INLINE uint32_t GXT_SYSTICK_IsActiveCounterFlag(void)
{return ((SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk) == (SysTick_CTRL_COUNTFLAG_Msk));
}static uint32_t getCurrentMicros(void)
{/* Ensure COUNTFLAG is reset by reading SysTick control and status register */GXT_SYSTICK_IsActiveCounterFlag();uint32_t m = HAL_GetTick();const uint32_t tms = SysTick->LOAD + 1;__IO uint32_t u = tms - SysTick->VAL;if (GXT_SYSTICK_IsActiveCounterFlag()) {m = HAL_GetTick();u = tms - SysTick->VAL;}return (m * 1000 + (u * 1000) / tms);
}//获取系统时间,单位us
uint32_t micros(void)
{return getCurrentMicros();
}//微秒级延时函数
void Delay_us(uint16_t nus)
{int temp = micros();while(micros() - temp < nus){}
}2、micros.h
#ifndef __MICROS_H__
#define __MICROS_H__#include "stm32f4xx_hal.h"uint32_t micros(void);
void Delay_us(uint16_t nus);#endif
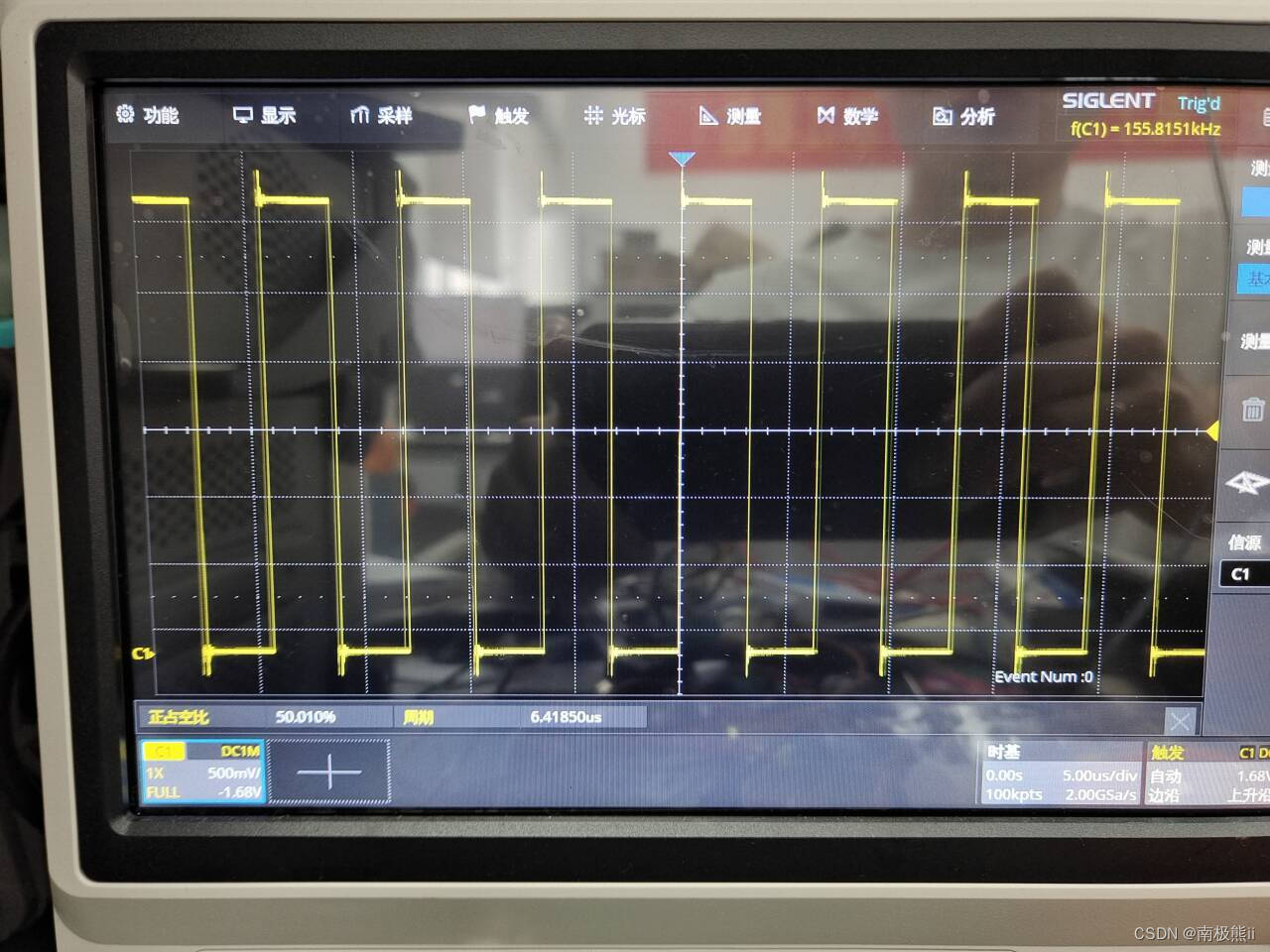
3、测试结果
波形较不稳定,周期准确度较高

二、定时器中断延时函数
1、HAL库开启定时器
已知TIM1挂载在APB2总线上
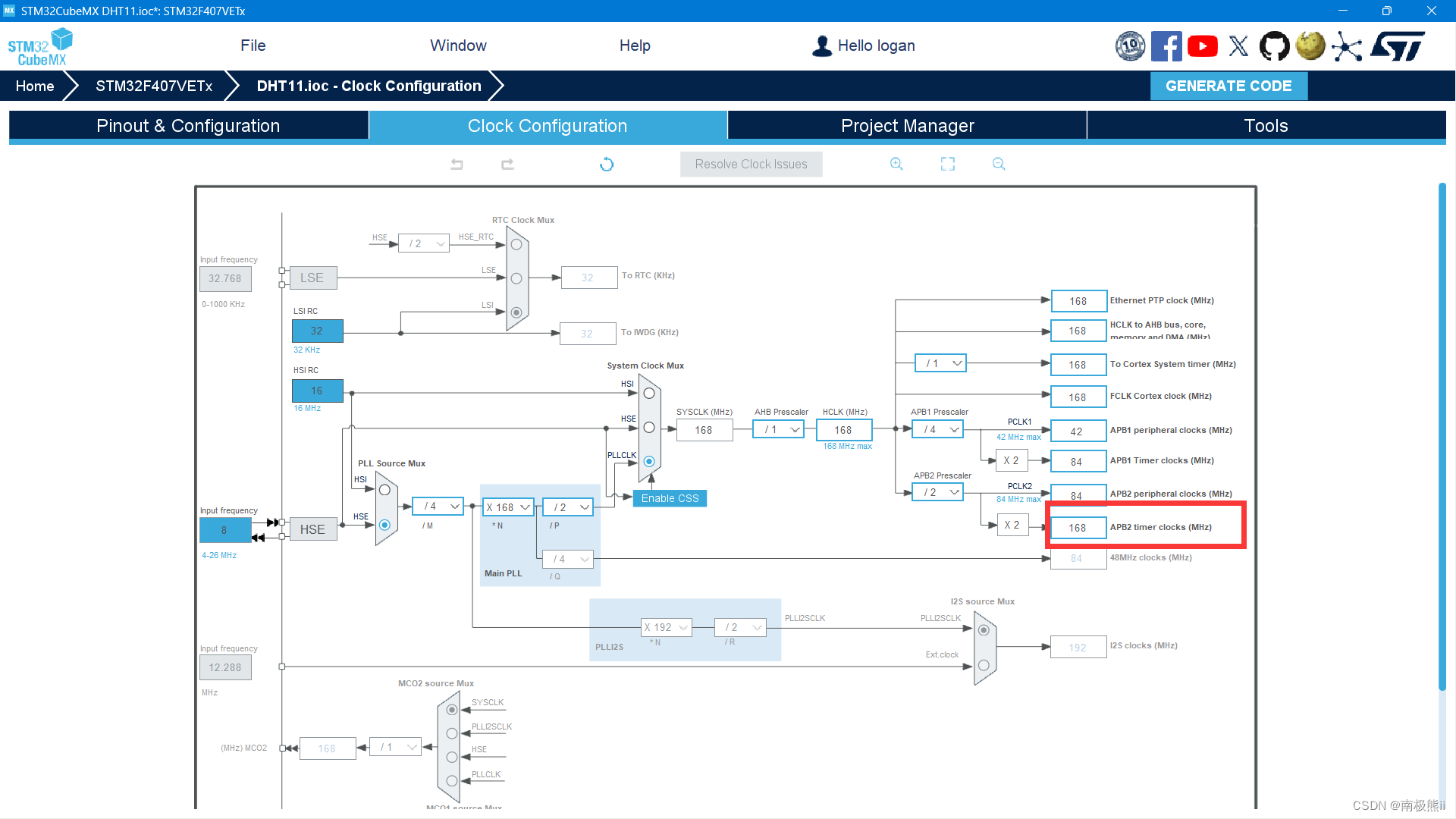
配置参数值

2、延时函数
/*** @brief 定时器延时us,Prescaler -> 168-1* @param us: <= 65535* @retval None*/void Delay_us(uint16_t nus)
{__HAL_TIM_SetCounter(&htim1,0);__HAL_TIM_ENABLE(&htim1);while (__HAL_TIM_GET_COUNTER(&htim1) < nus){}__HAL_TIM_DISABLE(&htim1);
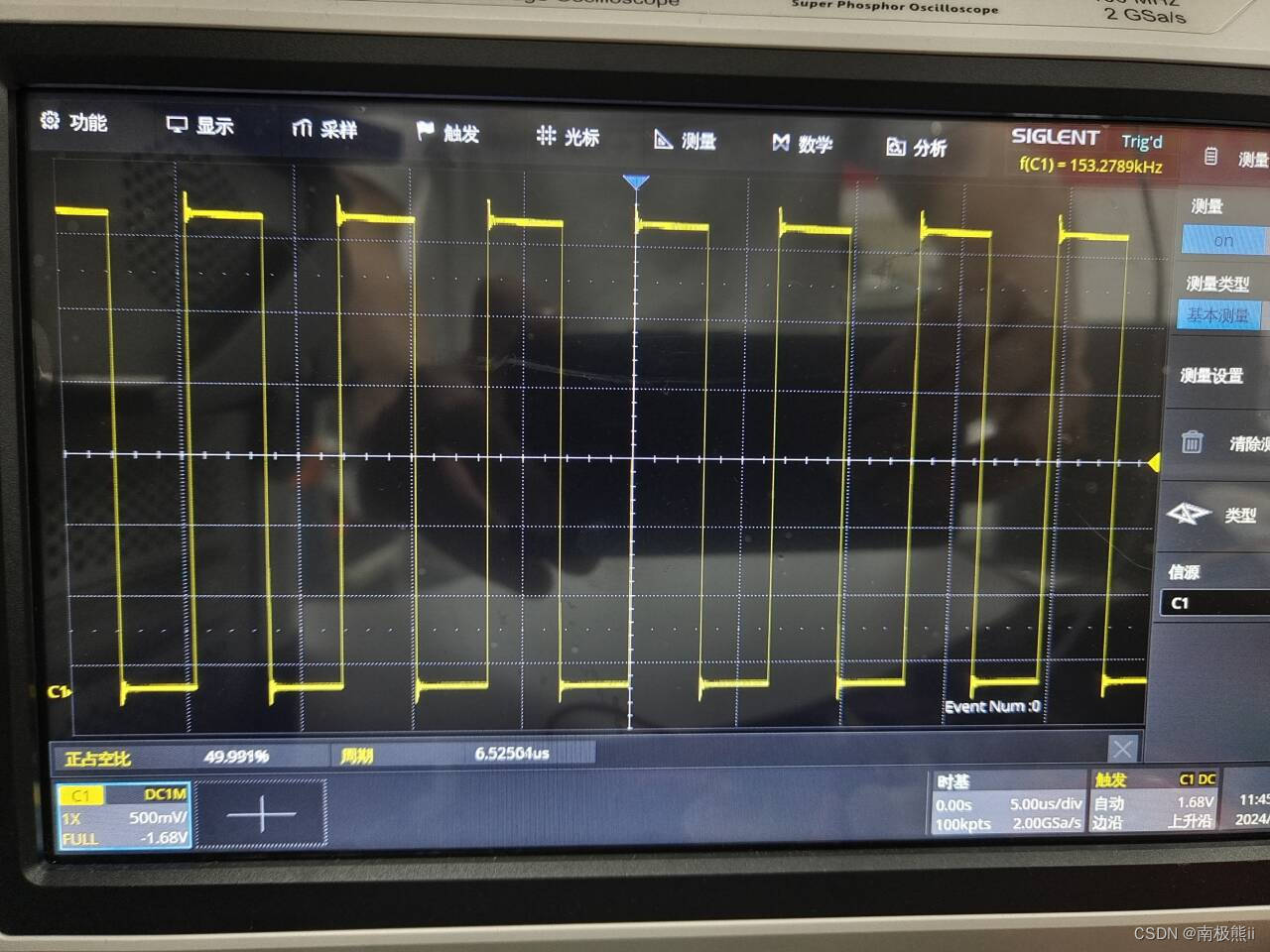
}3、测试结果
波形较稳定,周期稳定地偏长0.3-0.4us

三、纯代码1
1、Delay_us.c
__IO float usDelayBase;void PY_usDelayTest(void)
{__IO uint32_t firstms, secondms;__IO uint32_t counter = 0;firstms = HAL_GetTick()+1;secondms = firstms+1;while(uwTick!=firstms) ;while(uwTick!=secondms) counter++;usDelayBase = ((float)counter)/1000;
}void PY_Delay_us_t(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);delayReg = 0;while(delayReg!=usNum) delayReg++;
}void PY_usDelayOptimize(void)
{__IO uint32_t firstms, secondms;__IO float coe = 1.0;firstms = HAL_GetTick();PY_Delay_us_t(1000000) ;secondms = HAL_GetTick();coe = ((float)1000)/(secondms-firstms);usDelayBase = coe*usDelayBase;
}void Delay_us(uint16_t nus)
{__IO uint32_t delayReg;__IO uint32_t msNum = nus/1000;__IO uint32_t usNum = (uint32_t)((nus%1000)*usDelayBase);if(msNum>0) HAL_Delay(msNum);delayReg = 0;while(delayReg!=usNum) delayReg++;
}
2、测试结果
波形较稳定,周期稳定地偏长0.3-0.4us
四、纯代码2
1、Delay_us.c
#define CPU_FREQUENCY_MHZ 168 //STM32主频void Delay_us(__IO uint32_t delay)
{int last, curr, val;int temp;while (delay != 0){temp = delay > 900 ? 900 : delay;last = SysTick->VAL;curr = last - CPU_FREQUENCY_MHZ * temp;if (curr >= 0){do{val = SysTick->VAL;}while ((val < last) && (val >= curr));}else{curr += CPU_FREQUENCY_MHZ * 1000;do{val = SysTick->VAL;}while ((val <= last) || (val > curr));}delay -= temp;}
}
2、测试结果
波形较稳定,偏差稳定0.5us
这篇关于【STM32+HAL】微秒级延时函数汇总的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




