本文主要是介绍【进程等待】waitpid的参数pid | status的位图位操作WIFEXITEDWEXITSTATUS宏,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
waitpid
pid
status
status位图
status按位操作
输入型参数和输入型参数
宏WIFEXITED&WEXITSTATUS
options&非阻塞等待
上篇进程等待我们介绍到怎样去进程等待。我们介绍了wait函数&阻塞等待。本篇我们将介绍waitpid函数的参数pid和status。
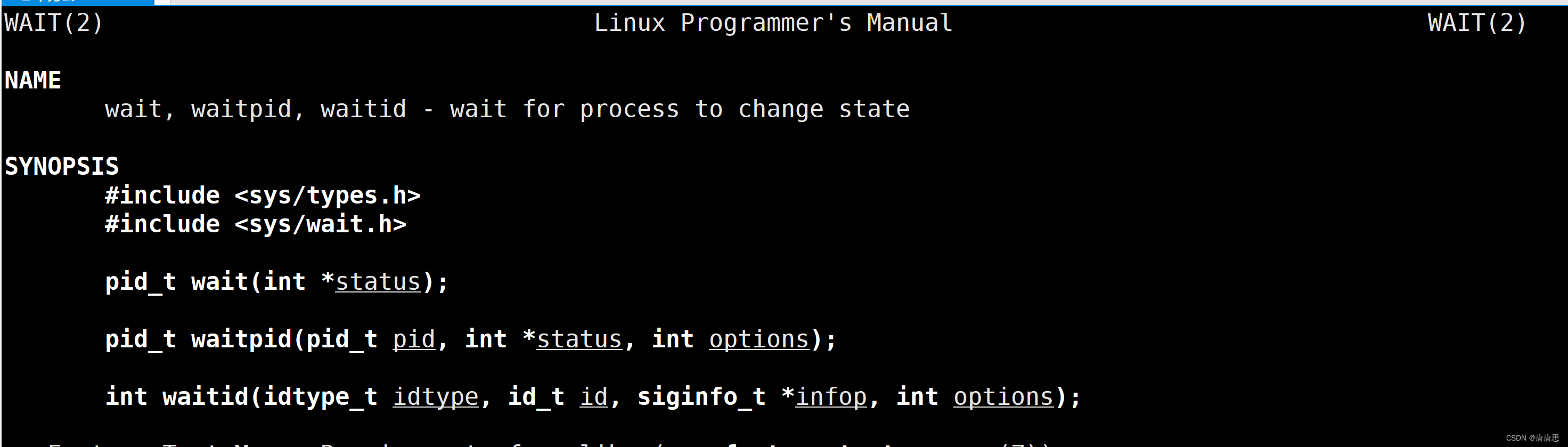
waitpid
- man 2 waitpid
- 等待一个进程的状态发生变化
- pit_t pid是父进程等待的子进程的pid,情况有3种,这里介绍两种情况。
- int *status是NULL
- int options是0
- 先把后面两个参数设置为NULL和0
pid_ t waitpid(pid_t pid, int *status, int options);
返回值:
- 当正常返回的时候waitpid返回收集到的子进程的进程ID;
- 如果设置了选项WNOHANG,而调用中waitpid发现没有已退出的子进程可收集,则返回0;
- 如果调用中出错,则返回-1,这时errno会被设置成相应的值以指示错误所在;
参数:
pid:
- Pid=-1,等待任一个子进程。与wait等效。
- Pid>0.等待其进程ID与pid相等的子进程。
status:
- WIFEXITED(status): 若为正常终止子进程返回的状态,则为真。(查看进程是否是正常退出)
- WEXITSTATUS(status): 若WIFEXITED非零,提取子进程退出码。(查看进程的退出码)
options:
- WNOHANG: 若pid指定的子进程没有结束,则waitpid()函数返回0,不予以等待。若正常结束,则返回该子进程的ID。
waitpid是一个在Unix和类Unix系统(如Linux)中常用的系统调用,用于等待一个或多个子进程的状态改变。与wait系统调用相比,waitpid提供了更多的灵活性,因为它允许你指定要等待的子进程的PID(进程ID),并可以设置等待的模式(阻塞或非阻塞)。以下是
waitpid函数的原型和参数详解:
pid_t waitpid(pid_t pid, int *status, int options);
pid:这是一个整数,用于指定要等待的子进程的PID。其取值有以下几种情况:
pid > 0:等待指定PID为pid的子进程。pid = 0:等待当前进程组中的任何子进程。pid = -1:等待任何子进程,与wait函数的功能相同。pid < -1:等待组ID为-pid的任意子进程。status:这是一个指向整数的指针,用于存储子进程的退出状态。如果不需要这些信息,可以将此参数设置为NULL。options:这是一个位掩码,用于修改waitpid的行为。常见的选项有:
WNOHANG:使waitpid调用变为非阻塞。如果没有子进程满足条件,waitpid会立即返回。WUNTRACED:当子进程被停止时(而不是退出时),也返回它的状态。这通常与跟踪被调试的子进程有关。WCONTINUED:当被停止的子进程恢复时,返回它的状态。
waitpid的返回值有以下几种情况:
- 如果成功,返回收集到的子进程的PID。
- 如果设置了
WNOHANG选项并且没有子进程满足条件,返回0。- 如果在调用中出现错误,返回-1,并设置全局变量
errno以指示错误。
waitpid是一个非常有用的工具,允许你更精细地控制和管理你的子进程。
pid
- 这样设置waitpid的参数,waitpid(-1,NULL,0)和 wait(NULL)的功能一致
- pid = -1表示等待任何一个子进程的退出
- pid > 0表示等待指定的一个子进程的退出
- pid为错误数字。wait fail !(只要pid不输入错误❌一般父进程都不会等待失败)
- fork返回值
- 0是子进程执行
- >0返回的是子进程的pid 是父进程执行(id是子进程的pid数值)
pid:这是一个整数,用于指定要等待的子进程的PID。其取值有以下几种情况:
pid > 0:等待指定PID为pid的子进程。pid = 0:等待当前进程组中的任何子进程。pid = -1:等待任何子进程,与wait函数的功能相同。pid < -1:等待组ID为-pid的任意子进程。
myprocess.c 1 #include<stdio.h>2 #include<unistd.h>3 #include<string.h>4 #include<stdlib.h>5 #include<sys/types.h>6 #include<sys/wait.h>7 8 void ChildRun()9 {10 int cnt = 5;11 while(cnt--)12 {13 printf("I am child,pid: %d,ppid: %d,cnt: %d\n",getpid(),getppid() ,cnt);14 sleep(1);15 }16 }17 18 int main()19 {20 printf("I am father,pid: %d,ppid: %d\n",getpid(),getppid());//父进> 程21 pid_t id = fork(); 22 if(id == 0)//child子进程23 {24 //子进程循环运行25 ChildRun();26 printf("Child quit...\n");27 exit(0);//终止进程,子进程直接僵尸28 }29 //father30 //父进程,父进程在子进程运行期间5ms一直在等待....31 //pid_t rid = wait(NULL); 32 pid_t rid = waitpid(id,NULL,0);33 if(rid > 0)34 {35 printf("wait success,rid: %d\n",rid);36 } 37 sleep(3);38 printf("father quit ... \n");39 }
【错误的pid演示】
//father31 //父进程,父进程在子进程运行期间5ms一直在等待.... 32 pid_t rid = waitpid(id+1 , NULL , 0);33 if(rid > 0)34 {35 printf("wait success,rid: %d\n",rid);36 }37 else38 {39 printf("wait fail !\n");40 }41 sleep(3);42 printf("father quit ... \n"); 
status
status:这是一个指向整数的指针,用于存储子进程的退出状态。如果不需要这些信息,可以将此参数设置为NULL。
- int *status表示通过等待获取子进程的退出信息。(❗前面的进程终止已知进程终止的退出信息表示退出码&退出信号)
- 父进程通过waitpid等待子进程,通过第二个参数就可以拿到子进程的退出信息(status是输出型参数)
- 当然也存在父进程不关心子进程的退出信息,&status直接置为NULL即可。(等待是必须的,但是获取子进程的退出信息不是必须的)
- status不能简单的当作整形来看待,可以当作位图来看待,存在特定的格式。
- status是输出型参数。
- status按位操作拿到退出码和退出信号。
- status通过下面两个宏拿到退出码和退出信号。
- WIFEXITED(status): 若为正常终止子进程返回的状态,则为真。(查看进程是否是正常退出)
- WEXITSTATUS(status): 若WIFEXITED非零,提取子进程退出码。(查看进程的退出码。
有人问可不可以不用waitpid传递子进程的退出信息,直接定义两个全局变量exit_code,exit_signal。在子进程退出的时候写入自己的退出信息到全局变量当中❓
- 当然不可以,全局也是数据。虽然一开始是被父子进程共享,当子进程要写入的时候,会发生写时拷贝,此刻父子进程都有一份各自的全局变量的数据,父进程是看不到的子进程写入自己的全局变量的数据。
- 所以只能通过waitpid的status参数。下面我们来仔细学习以下☞☞
status位图
怎么把子进程的退出信息(退出码和退出信号)整合成一个数字赋值给status呢❓
- wait和waitpid,都有一个status参数,该参数是一个输出型参数,由操作系统填充。
- 如果传递NULL,表示不关心子进程的退出状态信息。
- 否则,操作系统会根据该参数,将子进程的退出信息反馈给父进程。
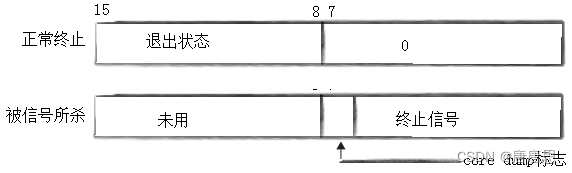
- status不能简单的当作整形来看待,可以当作位图来看待,存在特定的格式,32比特位具体细节如下图(只研究status低16比特位)
- 32比特位只使用低16比特位
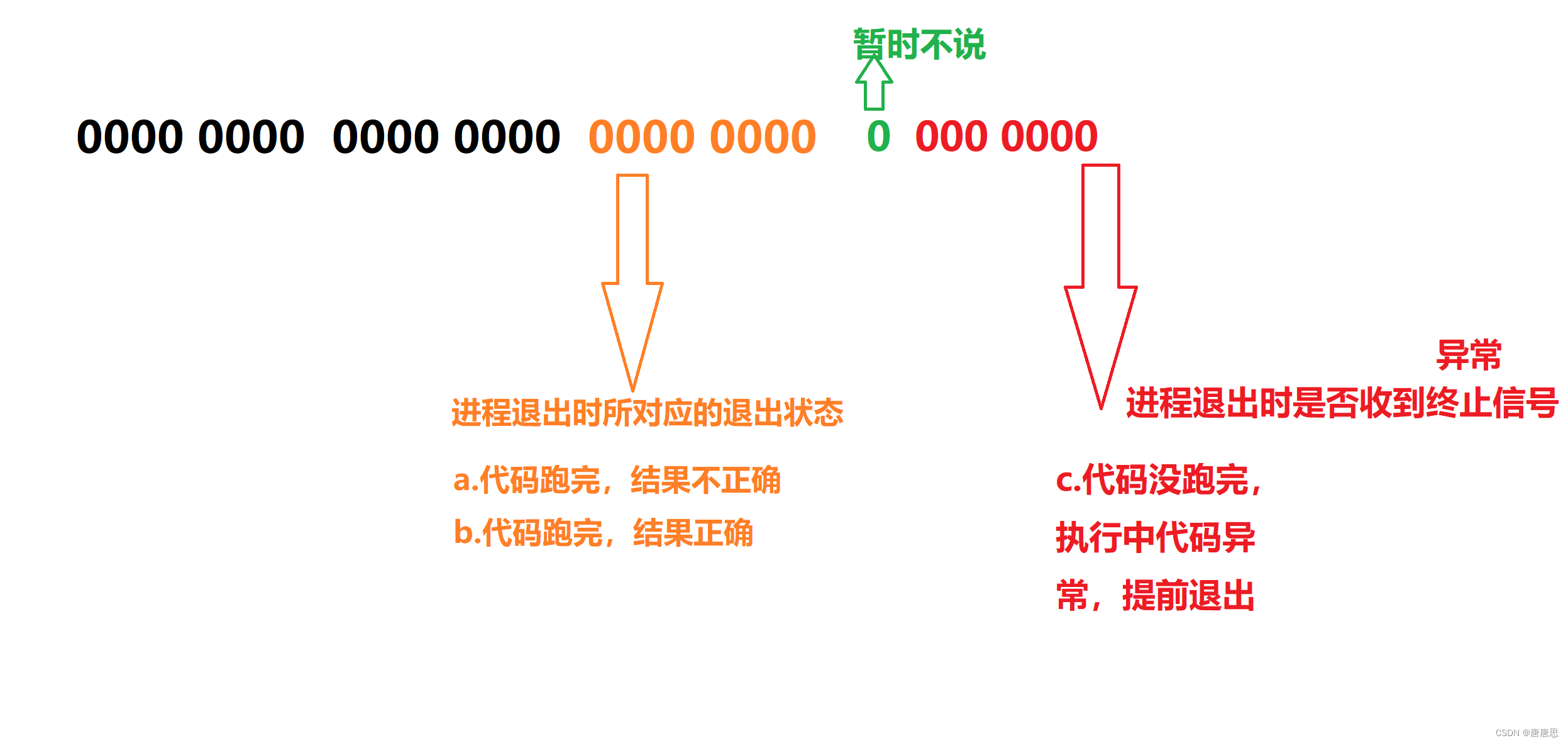
- 其中次低8位:进程退出时所对应的退出状态(退出码)
- 其中最低7位:进程退出时是否受到终止信号(退出信号)
- 第8位:暂时不考虑,后面进程信号会讲
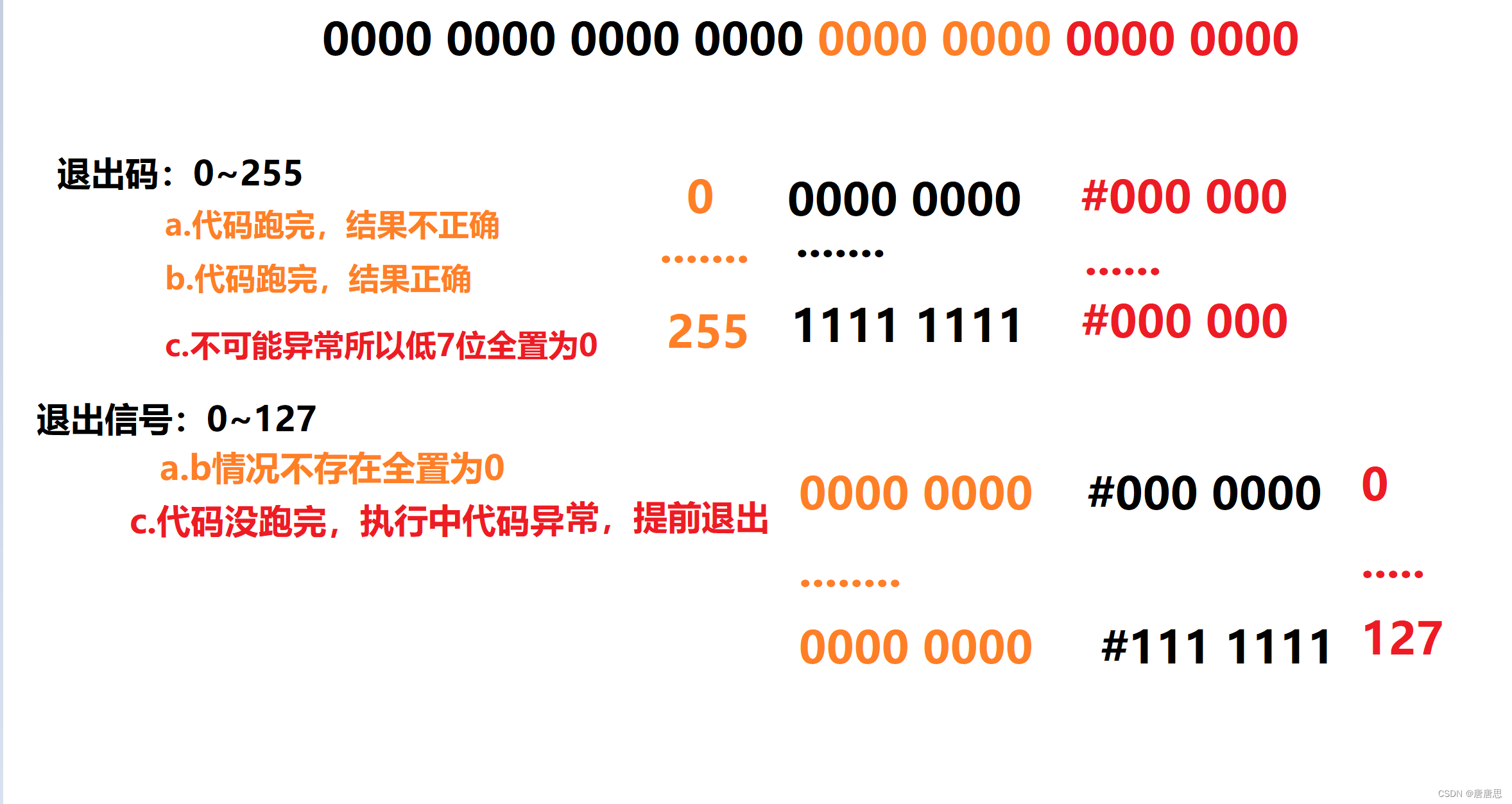
- 所以,退出状态的取值范围是[0,255],退出信号取值范围:[0,127]
- status是以位图的形式把子进程的退出码和退出信息返回给父进程的
在Linux的
waitpid函数中,status参数是一个指向整数的指针,它用于存储子进程的退出状态信息。尽管status本身是一个整型指针,但我们更关心的是它所指向的那个整数变量的取值范围和内容。
- 这个整数变量(我们称之为
status_val)通常用于表示子进程的退出状态。在大多数情况下,我们只关心这个整数的低16位,因为高16位通常不被使用。- 正常退出:如果子进程正常退出(即调用了
exit()函数),那么status_val的低16位的高8位将保存子进程的返回值(范围是0-255)。低8位中的低7位将被设置为0,而最高位(第8位)通常被用来表示一个标志位,以区分是正常退出还是由于信号而退出。- 异常退出:如果子进程由于接收到一个信号而退出,那么
status_val的低16位的低7位将保存导致子进程退出的信号的编号(范围通常是1-127,但取决于系统和信号的具体实现)。同样,最高位(第8位)将用于表示是由于信号而退出。为了从
status_val中提取这些信息,可以使用一些宏(如WEXITSTATUS、WTERMSIG等)来进行位操作和提取。因此,
status本身并没有一个固定的取值范围,因为它只是一个指针。但它所指向的那个整数变量(status_val)的取值范围和内容则取决于子进程的退出状态。
status按位操作
我们知道子进程的退出码和退出信息被父进程调用waitpid等待时,赋值给status参数。如果我们想要在父进程里面查看详细的子进程的退出码和退出信息🆗请看下面代码。
- 正常退出:(status>>8)&0xFF
- 异常退出:status&0x7F
- 解释☞位操作专题。
//....同上18 int main()19 {20 printf("I am father,pid: %d,ppid: %d\n",getpid(),getppid());//父进程21 pid_t id = fork();22 if(id == 0)//child子进程23 {24 //子进程循环运行25 ChildRun();26 printf("Child quit...\n");27 exit(1);//终止进程,子进程直接僵尸28 }29 //father30 //父进程,父进程在子进程运行期间5ms一直在等待.... 31 int status = 0;32 pid_t rid = waitpid(id, &status, 0);33 if(rid > 0)34 {35 printf("wait success,rid: %d\n",rid);36 }37 else38 {39 printf("wait fail !\n");40 }41 sleep(3);42 printf("father quit,status: %d,code: %d,signal: %d\n",status, (status>>8)&0XFF,status&0X7F); 43 }

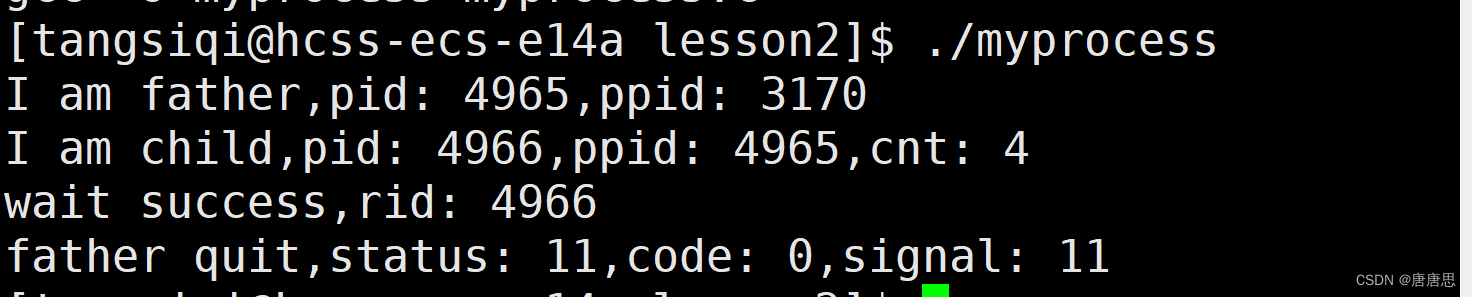
【kill -9 pid错误测试】

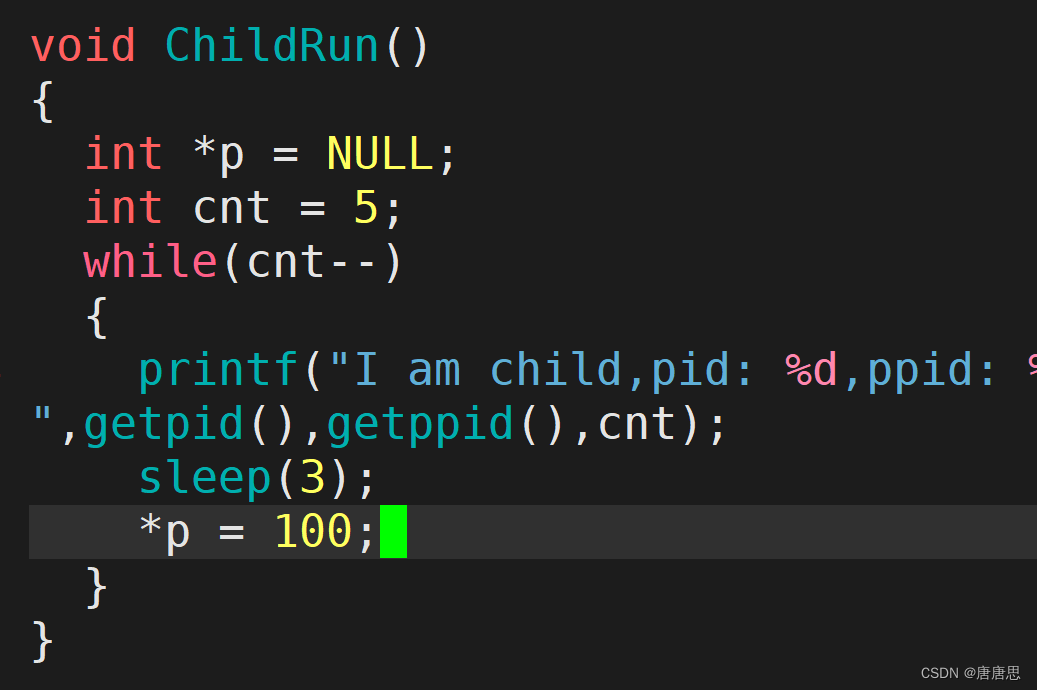
【野指针错误测试】
输入型参数和输入型参数
在函数或系统调用的参数中,我们通常区分输入型参数(Input Parameters)和输出型参数(Output Parameters)。这些参数在函数或系统调用的执行过程中扮演不同的角色。
输入型参数(Input Parameters):
- 这些参数是函数或系统调用所需的信息或数据,用于执行特定的任务或操作。
- 它们通常由调用者(Caller)提供,并在函数或系统调用内部被使用。
- 输入型参数的值在函数或系统调用执行前后不会改变(除非函数或系统调用有特定的功能去修改它们)。
- 在
waitpid函数中,pid和options是输入型参数。pid指定了要等待的子进程的PID,而options则设置了等待的行为(如阻塞或非阻塞)。输出型参数(Output Parameters):
- 这些参数用于存储函数或系统调用的结果或返回的数据。
- 它们通常在函数或系统调用执行前未定义或具有初始值,但在执行后被赋值或更新。
- 输出型参数的值在函数或系统调用执行后会被改变。
- 在
waitpid函数中,status是输出型参数。它用于存储子进程的退出状态信息,这些信息在函数执行前是未知的。总结:输入型参数是函数或系统调用所需的信息,而输出型参数则用于存储函数或系统调用的结果。在调用函数或系统调用时,正确设置输入型参数和处理输出型参数是非常重要的。
【输入型参数VS输出型参数】简而言之,输入型参数是调用者提供,输出型参数是程序赋值提供 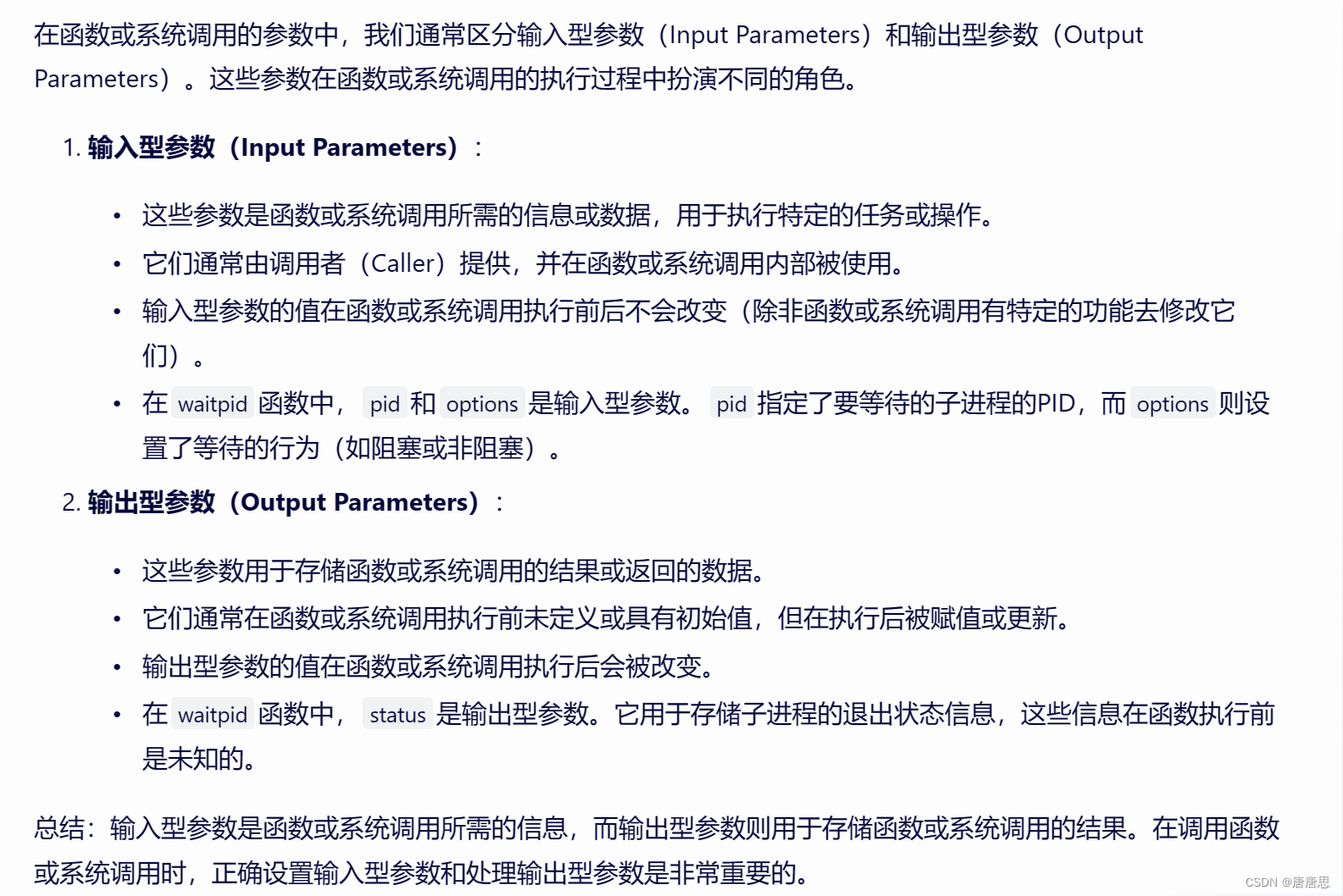
宏WIFEXITED&WEXITSTATUS
除了用status通过按位操作来提取子进程的退出码和退出信号,有没有其他方法❓
- status按位操作不方便,介绍两个宏。(本质上就是status按位操作封装的)
- WIFEXITED(status): 若为正常终止子进程返回状态,则为真。查看进程是否是正常退出
- WEXITSTATUS(status): 若WIFEXITED非零,提取子进程退出码。查看进程的退出码
- WIFEXITED:W:wait IF:if EXITED:exited(等待退出)
- WEXITSTATUS:W:wait EXIT:exit STATUS:status(等待退出状态)
- 本质是:检查退出信号sign位也就是status的低7位是否位0,为0则是正常退出。非0则是异常退出。若是正常退出则若用户愿意可以用WEXITSTATUS查看退出码。
- ❗可以用这两个宏来判断是否退出为正常。
1: myprocess.c1 #include<stdio.h>2 #include<unistd.h>3 #include<string.h>4 #include<stdlib.h>5 #include<sys/types.h>6 #include<sys/wait.h>7 8 void ChildRun()9 { 10 int cnt = 5;11 while(cnt--)12 {13 printf("I am child,pid: %d,ppid: %d,cnt: %d\n",getpid(),getppid(),cnt);14 sleep(1);15 }16 }17 18 int main()19 {20 printf("I am father,pid: %d,ppid: %d\n",getpid(),getppid());//父进程21 pid_t id = fork();22 if(id == 0)//child子进程23 {24 //子进程循环运行25 ChildRun();26 printf("Child quit...\n");27 exit(1);//终止进程,子进程直接僵尸28 }29 //father30 //父进程,父进程在子进程运行期间5ms一直在等待.... 31 int status = 0;32 pid_t rid = waitpid(id, &status, 0);33 if(rid > 0)34 {35 if(WIFEXITED(status))36 {37 printf("child quit normal,child exit code: %d\n",WEXITSTATUS(status));38 }39 else40 {41 printf("child quit unnormal!\n");42 }43 printf("wait success,rid: %d\n",rid); 44 }45 else46 {47 printf("wait fail !\n");48 }49 sleep(3);50 //printf("father quit,status: %d,code: %d,signal: %d\n",status,(status>>8)&0XFF,status&0X7F);51 }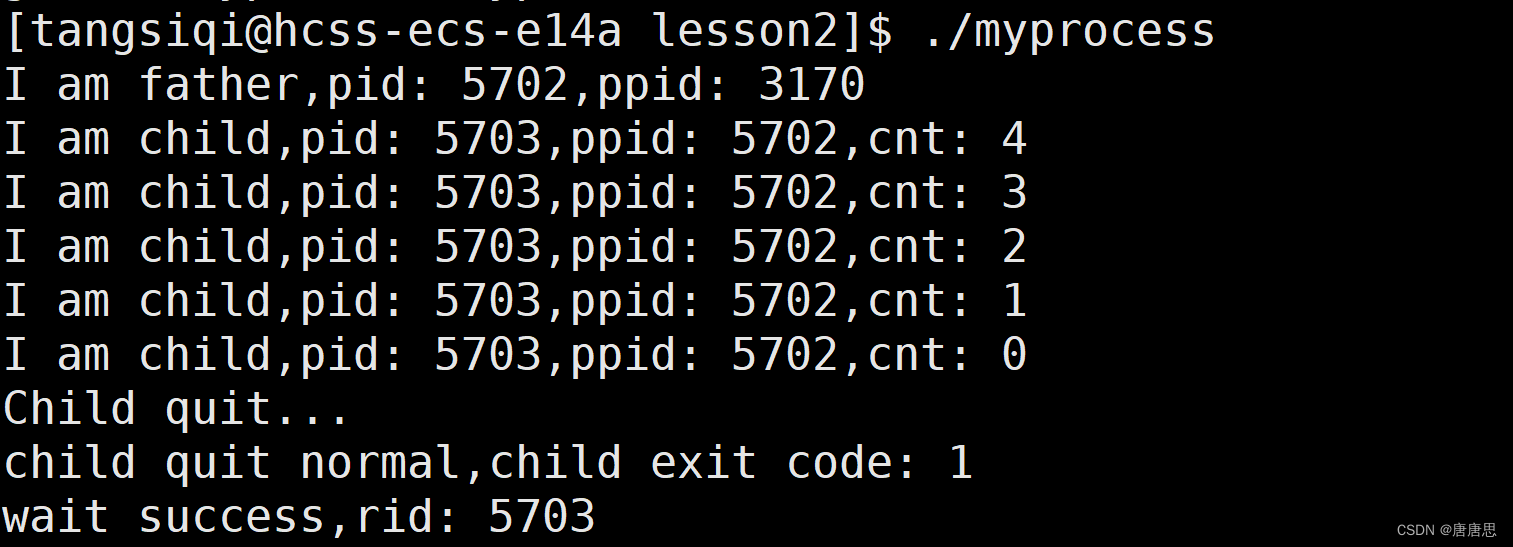
options&非阻塞等待
前面讲到在子进程运行期间,父进程一直在等待,能不能干点别的事情❓
options:这是一个位掩码,用于修改waitpid的行为。常见的选项有:
WNOHANG:使waitpid调用变为非阻塞。如果没有子进程满足条件,waitpid会立即返回。WUNTRACED:当子进程被停止时(而不是退出时),也返回它的状态。这通常与跟踪被调试的子进程有关。WCONTINUED:当被停止的子进程恢复时,返回它的状态。
🙂感谢大家的阅读,若有错误和不足,欢迎指正。下篇阻塞等待和非阻塞等待以及waitpid的最后一个参数。
这篇关于【进程等待】waitpid的参数pid | status的位图位操作WIFEXITEDWEXITSTATUS宏的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







