本文主要是介绍华为车BU迈入新阶段,新任CEO对智能车的3个预判,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
作者 |张马也
编辑 |德新

4月24日,北京车展前夕,华为召开了新一年的智能汽车解决方案新品发布会。
这次发布会,也是华为智能汽车解决方案BU(简称「车BU」)CEO 靳玉志的公开首秀。
一开场,靳玉志即抛出了3个论断:
- 汽车电动化的下半场是智能化;
- 油电同智,油车的智能化也在加速进行;
- 2024年是智驾规模化商用元年。
基于此,在当天的发布会上,华为公布了全新的智能汽车解决方案品牌——华为乾崑,并一次性发布了10大新产品,覆盖智能驾驶、鸿蒙智能座舱、车控、车云等领域。
此举的目的也很明确:华为乾崑,希望成为车企智能化的第一选择。
用华为的说法是:把智能带入每一辆车,引领全球汽车第二个百年的变革。
一、乾崑ADS 3.0:去掉刚刚开始普及的BEV
发布会上最大最受关注的非ADS 3.0智能驾驶系统莫属。
据统计,在已采用华为方案的各车型中,目前智驾总里程达到6681万公里,占车辆行驶总里程的33%,智能驾驶能力也逐渐成为购车的重要参考因素。
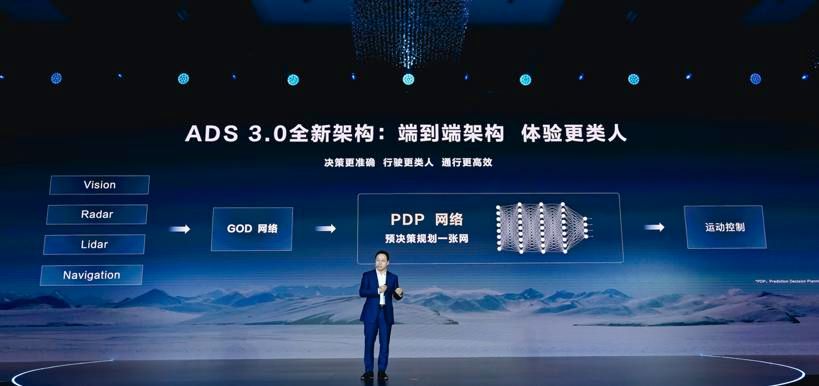
全新的ADS 3.0主要包括以下四大特征:
- 全新架构升级:GOD网络 + PDP网络的端到端架构
- 安全再进阶:全向防碰撞系统CAS3.0;
- 场景升级:车位到车位的智能驾驶;
- 智能泊车:泊车代驾全场景商用;
具体来说,ADS 3.0去掉了BEV网络,基于GOD(通用障碍物识别)大网,实现从「识别障碍物」到「理解驾驶场景」的进步,从而提升了智能驾驶的安全性与驾乘体验。
BEV架构近两年才逐渐普及,现在华为已然要将其淘汰,这也侧面说明智能驾驶的普及速度,可能会超出我们的预期。
此外,ADS 3.0全新架构采用PDP(预测决策规控)网络,实现预决策和规划一张网,以此实现拟人化的决策和规划,行驶轨迹更类人,实现复杂路口通过率>96%。
硬件配置方面,虽然随着智驾向低端车型渗透,不少公司的方案采用了视觉为主技术,但华为并没有放弃多传感器融合,而是进一步升级,以满足不同层次的需求。

- 激光雷达,主要实现的是全天候和小目标检测能力的提升,包括雨雪、雾霾等天气,以及实现低于14cm的小物体的远距离检测。去年底发布的问界M9,搭载了D3 192线的激光雷达,今年年底,华为将发布D3 PRO版;同时预计在2025年推出更高规格的D5平台。
- 4D毫米波雷达。华为发布其首个高精度4D毫米波雷达,配备波导天线、4T4R、超宽带,实现探测距离提升35%,精度提升4倍,时延降低65%。
- 云端算力。依托华为云的基础设施能力,ADS 3.0的智驾模型迭代速度也有大幅度提升。目前预计到6月底,自动驾驶云端算力达到 3.5E FLOPS。训练数据量达到每天3000万公里,模型每5天迭代一次。
在主动安全方面,全新升级全向防碰撞系统CAS 3.0,并实现了ESA(紧急转向辅助)再增强。
在AEB(自动紧急制动)刹车距离不足的场景下,系统自动紧急转向避障,不需要先打方向盘触发。侧向主动安全也支持更多的场景,例如支持斜穿、横穿的车辆、自行车和电动车;支持更灵活的避让空间。
ADS 3.0还首次发布车位到车位的智驾领航NCA功能,可以实现从公开道路到园区道路,从园区地面到地下车位,全场景贯通的无缝智能驾驶,在进入地下车位这样的封闭场景时,不需要用户自行驾驶。
在智能泊车方面,ADS 3.0进一步支持离车即走,也就是到达目的地,选择目标车位后,人下车即走,车辆自主泊入,无需原地等待。目前,泊车代驾支持8城48个商业停车场,6个城市的43个社区/办公停车场,预计2024年底支持100个商业停车场,2000个社区和办公停车场。
最后,除了高阶的乾崑ADS 3.0版本外,乾崑ADS还推出了ADS SE版本,支持高速智能驾驶,泊车可见即可泊的基础智能泊车能力。
二、新一代鸿蒙座舱:大模型首次上车
得益于华为手机的品牌效应,鸿蒙车机一直是华为汽车方案备受关注的板块。
在新一代座舱中,华为千悟引擎首次上车,在大模型的加持下,座舱体验更加智能化。
- 语音识人:可通过用户声纹识别每个乘员的位置,感知并记录个人喜好,实现个性化的服务。
- 智能化用车指南:大模型具备了全量车辆知识图谱,任何问题只需要语音交互即可。
- 快速声纹复制:只需要简单几句交互,就能模拟用户语音进行交互。
- 跨设备互联:比如车机直接导航到手机发来的位置,手机车机无缝连接。
- 全舱多模态的人体感知:能实现用手势控制遮阳帘、车门和空调风向等。
此外,鸿蒙车机还在声、画上有不少更新。
智慧音响系统新推出非凡系列,采用AI声画解析技术和AI空间音技术,能自根据画面在舱内重混出3D声音,以及实现前后排座位独立音区,让前后排的声音相互隔绝,互不干扰。
中控屏应用超分技术,能对屏幕做自适应画质增强,把低清视频算转成高清视频,例如720p视频算转成2K超高清视频。
三、车载光:智能车灯开始普及
车载光领域,也是靳玉志过去带领的华为光产品线在汽车的延伸。
华为这次主要发布了XHUD 2.0增强现实抬头显示系统,及XPIXEL智能车灯模组。
XHUD 2.0增强现实抬头显示系统通过自研车规级LCoS芯片、车规级成像模组,以及AR构图引擎,在高亮及暗光场景,均能实准、稳、快的导航显示,并实现盲区来车预警、减速提示、障碍绕行、自动汇入提示等功能。
XPIXEL百万像素智能车灯模组,拥有FOV为18° x 9°的视场角,光通量2000lm,体积1.3L,像素130万,具备安全照明、智能交互、个性娱乐等功能,比如:
- 通过精准跟随算法和目标预测算法,实现远光灯不干扰对向车辆;
- 车灯可实现与车外行人的互动,比如在地面投射「请通行」的文字;
- 甚至车灯也能成为户外投影仪,用于视频播放需求(不过从展示效果看,色彩以黑白为主)。
华为智能车灯模组,亦开放合作,预计今年会有10款该模组的车型陆续上市。

四、乾崐车控:推出首款五合一车控模组
在车控领域,华为在发布会上推出iDVP 2.0智能汽车数字平台、乾崑车控模组,以及XMOTION 2.0车身运动协同控制系统。
其中,乾崑iDVP 2.0智能汽车数字平台和高性能模组,支持车企在平台上灵活自定制应用。车控模组是首款五合一车控SOC,具备高集成、高性能、低时延、高可靠与高安全等特性。
XMOTION 2.0车身运动协同控制系统,通过支持6D车辆运动控制算法,实现驾驶性能的提升,对高速爆胎场景、冰雪路面、坑洼路面、减速带等场景都有针对性的体验提升。
五、车云3.0:大模型云端诊断
本次智能车云服务3.0,新发布了乾崑云鹊大模型(云端车辆智能诊断)、星闪数字钥匙、乾崑云瞰(手机远程查看车辆外部摄像头实时影像)、乾崑云曦(用户自定义迎宾灯)、DVFdiff OTA高效差分算法,和车联网安全云服务等应用及功能。
车云服务3.0覆盖了从用户备车、上车、用车、停车,以及维修保养等各大应用场景。
六、华为乾崑的进阶之年:ADS装车量将达50万台
华为车BU做车的各部件时,其实聚焦在智能化上,并基于过去二三十年华为在ICT技术,延伸到车领域,提供智能空间。
比如,音响领域用的是此前在功放领域算法的核心技术,iDVP平台用到了华为在数据通信中,IP、交换机等领域的技术。
到今年结束,搭载华为智驾系统的车辆会超过50万。
「去年加上今年上车的量,加在一起会达到50万辆,这个数量很可观的。」靳玉志认为。
「因为智驾刚刚起步,今年是智驾的元年,但是一旦启动就是一往无前。我认为未来最终有一天,中国2000多万或者3000多万的车,乘用车或者商务车也好,最终都会用上智驾。」
华为车BU副总裁迟林春在当日接受采访时也不点名地表示,「目前三大央企、三大地方国企,还有四大民企,同时包括一些造车的新势力,都用我们的方案」。
发布会当天,官方公布东风、长安、广汽、北汽、赛力斯、奇瑞以及江淮等将采用华为乾崑的智能汽车零部件,预计今年会有10多款车陆续推出。
这相比于国内每年2000万辆车的销售规模,还只能说是起步阶段,且出于成本考虑,智驾还往往限于中高端车型。
靳玉志认为,汽车的智能化是整体架构上的变化,而不能仅盯着某个或某些部件。
「我们会跟整车客户一起看它的整体架构上的成本,能不能做优化,看哪些东西是真的需要,哪些是过于冗余的,使得整车的成本是可控制的,同时能提供更好的品质、更好的质量和更优的体验」。
这篇关于华为车BU迈入新阶段,新任CEO对智能车的3个预判的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!