本文主要是介绍FPGA ov5640视频以太网传输,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 实验任务
使用DFZU4EV MPSoC 开发板及双目OV5640摄像头其中一个摄像头实现图像采集,并通过开发板上的以太网接口发送给上位机实时显示。
2 Verilog代码
2.1 顶层模块
`timescale 1ns / 1ps
//以太网传输视频顶层模块module ov5640_udp_pc (input sys_clk_p, //系统时钟 input sys_clk_n, //系统时钟input sys_rst_n, //系统复位信号,低电平有效 //以太网接口input eth_rxc, //RGMII接收数据时钟input eth_rx_ctl, //RGMII输入数据有效信号input [3:0] eth_rxd, //RGMII输入数据output eth_txc, //RGMII发送数据时钟 output eth_tx_ctl, //RGMII输出数据有效信号output [3:0] eth_txd, //RGMII输出数据 //摄像头接口 input cam_pclk, //cmos 数据像素时钟input cam_vsync, //cmos 场同步信号input cam_href, //cmos 行同步信号input [7:0] cam_data, //cmos 数据output cam_rst_n, //cmos 复位信号,低电平有效output cam_pwdn, //电源休眠模式选择 0:正常模式 1:电源休眠模式output cam_scl, //cmos SCCB_SCL线inout cam_sda //cmos SCCB_SDA线
);//parameter define//开发板MAC地址 00-11-22-33-44-55parameter BOARD_MAC = 48'h00_11_22_33_44_55;//开发板IP地址 192.168.1.10parameter BOARD_IP = {8'd192, 8'd168, 8'd1, 8'd10};//目的MAC地址 ff_ff_ff_ff_ff_ffparameter DES_MAC = 48'hff_ff_ff_ff_ff_ff;//目的IP地址 192.168.1.102 parameter DES_IP = {8'd192, 8'd168, 8'd1, 8'd102};parameter H_CMOS_DISP = 11'd640; //CMOS分辨率--行parameter V_CMOS_DISP = 11'd480; //CMOS分辨率--列 parameter TOTAL_H_PIXEL = H_CMOS_DISP + 12'd1216; //水平总像素大小parameter TOTAL_V_PIXEL = V_CMOS_DISP + 12'd504; //垂直总像素大小//wire definewire clk_100m; //100Mhz时钟wire eth_tx_clk; //以太网发送时钟wire cmos_frame_vsync; //输出帧有效场同步信号 wire img_data_en; //摄像头图像有效信号wire [15:0] img_data; //摄像头图像有效数据wire transfer_flag; //图像开始传输标志,0:开始传输 1:停止传输wire eth_rx_clk; //以太网接收时钟wire udp_tx_start_en; //以太网开始发送信号wire [15:0] udp_tx_byte_num; //以太网发送的有效字节数wire [31:0] udp_tx_data; //以太网发送的数据 wire udp_rec_pkt_done; //以太网单包数据接收完成信号wire udp_rec_en; //以太网接收使能信号wire [31:0] udp_rec_data; //以太网接收到的数据wire [15:0] udp_rec_byte_num; //以太网接收到的字节个数wire udp_tx_req; //以太网发送请求数据信号wire udp_tx_done; //以太网发送完成信号//*****************************************************//** main code//*****************************************************IBUFDS diff_clock (.I (sys_clk_p), //系统差分输入时钟.IB(sys_clk_n), //系统差分输入时钟.O (clk_100m) //输出系统时钟);ov5640_dri u_ov5640_dri (.clk(clk_100m), //时钟.rst_n(sys_rst_n), //复位信号,低电平有效//摄像头接口 .cam_pclk(cam_pclk), //cmos 数据像素时钟.cam_vsync(cam_vsync), //cmos 场同步信号.cam_href(cam_href), //cmos 行同步信号.cam_data(cam_data), //cmos 数据 .cam_rst_n(cam_rst_n), //cmos 复位信号,低电平有效.cam_pwdn(cam_pwdn), //cmos 电源休眠模式选择信号.cam_scl(cam_scl), //cmos SCCB_SCL线.cam_sda(cam_sda), //cmos SCCB_SDA线 //摄像头分辨率配置接口.cmos_h_pixel(H_CMOS_DISP), //水平方向分辨率.cmos_v_pixel(V_CMOS_DISP), //垂直方向分辨率.total_h_pixel(TOTAL_H_PIXEL), //水平总像素大小.total_v_pixel(TOTAL_V_PIXEL), //垂直总像素大小.capture_start(), //图像采集开始信号.cam_init_done(), //摄像头初始化完成//用户接口.cmos_frame_vsync(cmos_frame_vsync), //帧有效信号 .cmos_frame_href(), //行有效信号.cmos_frame_valid(img_data_en), //数据有效使能信号.cmos_frame_data(img_data) //有效数据 );//开始传输控制模块 start_transfer_ctrl u_start_transfer_ctrl (.clk (eth_rx_clk),.rst_n (sys_rst_n),.udp_rec_pkt_done(udp_rec_pkt_done),.udp_rec_en (udp_rec_en),.udp_rec_data (udp_rec_data),.udp_rec_byte_num(udp_rec_byte_num),.transfer_flag (transfer_flag) //图像开始传输标志,1:开始传输 0:停止传输);//图像封装模块 img_data_pkt u_img_data_pkt (.rst_n (sys_rst_n),.cam_pclk (cam_pclk),.img_vsync (cmos_frame_vsync),.img_data_en (img_data_en),.img_data (img_data),.transfer_flag (transfer_flag),.eth_tx_clk (eth_tx_clk),.udp_tx_req (udp_tx_req),.udp_tx_done (udp_tx_done),.udp_tx_start_en(udp_tx_start_en),.udp_tx_data (udp_tx_data),.udp_tx_byte_num(udp_tx_byte_num));//以太网顶层模块 eth_top #(.BOARD_MAC(BOARD_MAC), //参数例化.BOARD_IP (BOARD_IP),.DES_MAC (DES_MAC),.DES_IP (DES_IP)) u_eth_top (.sys_rst_n (sys_rst_n), //系统复位信号,低电平有效 //以太网RGMII接口 .eth_rxc (eth_rxc), //RGMII接收数据时钟.eth_rx_ctl(eth_rx_ctl), //RGMII输入数据有效信号.eth_rxd (eth_rxd), //RGMII输入数据.eth_txc (eth_txc), //RGMII发送数据时钟 .eth_tx_ctl(eth_tx_ctl), //RGMII输出数据有效信号.eth_txd (eth_txd), //RGMII输出数据 .gmii_rx_clk (eth_rx_clk),.gmii_tx_clk (eth_tx_clk),.udp_tx_start_en(udp_tx_start_en),.tx_data (udp_tx_data),.tx_byte_num (udp_tx_byte_num),.udp_tx_done (udp_tx_done),.tx_req (udp_tx_req),.rec_pkt_done (udp_rec_pkt_done),.rec_en (udp_rec_en),.rec_data (udp_rec_data),.rec_byte_num (udp_rec_byte_num));endmodule
2.2 ov5640顶层驱动模块
`timescale 1ns / 1ps
//ov5640驱动模块module ov5640_dri (input clk, //时钟input rst_n, //复位信号,低电平有效//摄像头接口 input cam_pclk, //cmos 数据像素时钟input cam_vsync, //cmos 场同步信号input cam_href, //cmos 行同步信号input [7:0] cam_data, //cmos 数据 output cam_rst_n, //cmos 复位信号,低电平有效output cam_pwdn, //cmos 电源休眠模式选择信号output cam_scl, //cmos SCCB_SCL线inout cam_sda, //cmos SCCB_SDA线 //摄像头分辨率配置接口input [12:0] cmos_h_pixel, //水平方向分辨率input [12:0] cmos_v_pixel, //垂直方向分辨率input [12:0] total_h_pixel, //水平总像素大小input [12:0] total_v_pixel, //垂直总像素大小input capture_start, //图像采集开始信号output cam_init_done, //摄像头初始化完成//用户接口output cmos_frame_vsync, //帧有效信号 output cmos_frame_href, //行有效信号output cmos_frame_valid, //数据有效使能信号output [15:0] cmos_frame_data //有效数据
);//parameter defineparameter SLAVE_ADDR = 7'h3c; //OV5640的器件地址7'h3cparameter BIT_CTRL = 1'b1; //OV5640的字节地址为16位 0:8位 1:16位parameter CLK_FREQ = 27'd100_000_000; //i2c_dri模块的驱动时钟频率 parameter I2C_FREQ = 18'd250_000; //I2C的SCL时钟频率,不超过400KHz//wire difinewire i2c_exec; //I2C触发执行信号wire [23:0] i2c_data; //I2C要配置的地址与数据(高8位地址,低8位数据) wire i2c_done; //I2C寄存器配置完成信号wire i2c_dri_clk; //I2C操作时钟wire [ 7:0] i2c_data_r; //I2C读出的数据wire i2c_rh_wl; //I2C读写控制信号//*****************************************************//** main code //*****************************************************//电源休眠模式选择 0:正常模式 1:电源休眠模式assign cam_pwdn = 1'b0;assign cam_rst_n = 1'b1;//I2C配置模块i2c_ov5640_rgb565_cfg u_i2c_cfg (.clk (i2c_dri_clk),.rst_n(rst_n),.i2c_exec (i2c_exec),.i2c_data (i2c_data),.i2c_rh_wl (i2c_rh_wl), //I2C读写控制信号.i2c_done (i2c_done),.i2c_data_r(i2c_data_r),.cmos_h_pixel (cmos_h_pixel), //CMOS水平方向像素个数.cmos_v_pixel (cmos_v_pixel), //CMOS垂直方向像素个数.total_h_pixel(total_h_pixel), //水平总像素大小.total_v_pixel(total_v_pixel), //垂直总像素大小.init_done(cam_init_done));//I2C驱动模块i2c_dri #(.SLAVE_ADDR(SLAVE_ADDR), //参数传递.CLK_FREQ (CLK_FREQ),.I2C_FREQ (I2C_FREQ)) u_i2c_dr (.clk (clk),.rst_n(rst_n),.i2c_exec (i2c_exec),.bit_ctrl (BIT_CTRL),.i2c_rh_wl (i2c_rh_wl), //固定为0,只用到了IIC驱动的写操作 .i2c_addr (i2c_data[23:8]),.i2c_data_w(i2c_data[7:0]),.i2c_data_r(i2c_data_r),.i2c_done (i2c_done),.scl (cam_scl),.sda (cam_sda),.dri_clk(i2c_dri_clk) //I2C操作时钟);//CMOS图像数据采集模块cmos_capture_data u_cmos_capture_data ( //系统初始化完成之后再开始采集数据 .rst_n(rst_n & cam_init_done),.cam_pclk (cam_pclk),.cam_vsync(cam_vsync),.cam_href (cam_href),.cam_data (cam_data),.cmos_frame_vsync(cmos_frame_vsync),.cmos_frame_href (cmos_frame_href),.cmos_frame_valid(cmos_frame_valid), //数据有效使能信号.cmos_frame_data (cmos_frame_data) //有效数据 );endmodule
2.3 ov5640寄存器配置模块
`timescale 1ns / 1ps
//ov5640寄存器配置模块module i2c_ov5640_rgb565_cfg (input clk, //时钟信号input rst_n, //复位信号,低电平有效input [ 7:0] i2c_data_r, //I2C读出的数据input i2c_done, //I2C寄存器配置完成信号input [12:0] cmos_h_pixel,input [12:0] cmos_v_pixel,input [12:0] total_h_pixel, //水平总像素大小input [12:0] total_v_pixel, //垂直总像素大小output reg i2c_exec, //I2C触发执行信号 output reg [23:0] i2c_data, //I2C要配置的地址与数据(高16位地址,低8位数据)output reg i2c_rh_wl, //I2C读写控制信号output reg init_done //初始化完成信号
);//parameter definelocalparam REG_NUM = 8'd250; //总共需要配置的寄存器个数//reg definereg [14:0] start_init_cnt; //等待延时计数器reg [ 7:0] init_reg_cnt; //寄存器配置个数计数器//*****************************************************//** main code//*****************************************************SCL配置成250KHz,输入的clk时钟频率为1Mhz,周期为1us 20000*1us = 20ms//OV5640上电到开始配置SCCB至少等待20msalways @(posedge clk or negedge rst_n) beginif (!rst_n) start_init_cnt <= 1'b0;else if (start_init_cnt < 15'd20000) beginstart_init_cnt <= start_init_cnt + 1'b1;endend//寄存器配置个数计数 always @(posedge clk or negedge rst_n) beginif (!rst_n) init_reg_cnt <= 8'd0;else if (i2c_exec) init_reg_cnt <= init_reg_cnt + 8'b1;end//i2c触发执行信号 always @(posedge clk or negedge rst_n) beginif (!rst_n) i2c_exec <= 1'b0;else if (start_init_cnt == 15'd20000 - 1'b1) i2c_exec <= 1'b1;else if (i2c_done && (init_reg_cnt < REG_NUM)) i2c_exec <= 1'b1;else i2c_exec <= 1'b0;end//配置I2C读写控制信号always @(posedge clk or negedge rst_n) beginif (!rst_n) i2c_rh_wl <= 1'b1;else if (init_reg_cnt == 8'd2) i2c_rh_wl <= 1'b0;end//初始化完成信号always @(posedge clk or negedge rst_n) beginif (!rst_n) init_done <= 1'b0;else if ((init_reg_cnt == REG_NUM) && i2c_done) init_done <= 1'b1;end//配置寄存器地址与数据always @(posedge clk or negedge rst_n) beginif (!rst_n) i2c_data <= 24'b0;else begincase (init_reg_cnt)//先读OV5640 ID8'd0: i2c_data <= {16'h300a, 8'h0}; //8'd1: i2c_data <= {16'h300b, 8'h0}; //8'd2: i2c_data <= {16'h3008, 8'h82}; //Bit[7]:复位 Bit[6]:电源休眠8'd3: i2c_data <= {16'h3008, 8'h02}; //正常工作模式8'd4: i2c_data <= {16'h3103, 8'h02}; //Bit[1]:1 PLL Clock//引脚输入/输出控制 FREX/VSYNC/HREF/PCLK/D[9:6]8'd5: i2c_data <= {8'h30, 8'h17, 8'hff};//引脚输入/输出控制 D[5:0]/GPIO1/GPIO0 8'd6: i2c_data <= {16'h3018, 8'hff};8'd7: i2c_data <= {16'h3037, 8'h13}; //PLL分频控制8'd8: i2c_data <= {16'h3108, 8'h01}; //系统根分频器8'd9: i2c_data <= {16'h3630, 8'h36};8'd10: i2c_data <= {16'h3631, 8'h0e};8'd11: i2c_data <= {16'h3632, 8'he2};8'd12: i2c_data <= {16'h3633, 8'h12};8'd13: i2c_data <= {16'h3621, 8'he0};8'd14: i2c_data <= {16'h3704, 8'ha0};8'd15: i2c_data <= {16'h3703, 8'h5a};8'd16: i2c_data <= {16'h3715, 8'h78};8'd17: i2c_data <= {16'h3717, 8'h01};8'd18: i2c_data <= {16'h370b, 8'h60};8'd19: i2c_data <= {16'h3705, 8'h1a};8'd20: i2c_data <= {16'h3905, 8'h02};8'd21: i2c_data <= {16'h3906, 8'h10};8'd22: i2c_data <= {16'h3901, 8'h0a};8'd23: i2c_data <= {16'h3731, 8'h12};8'd24: i2c_data <= {16'h3600, 8'h08}; //VCM控制,用于自动聚焦8'd25: i2c_data <= {16'h3601, 8'h33}; //VCM控制,用于自动聚焦8'd26: i2c_data <= {16'h302d, 8'h60}; //系统控制8'd27: i2c_data <= {16'h3620, 8'h52};8'd28: i2c_data <= {16'h371b, 8'h20};8'd29: i2c_data <= {16'h471c, 8'h50};8'd30: i2c_data <= {16'h3a13, 8'h43}; //AEC(自动曝光控制)8'd31: i2c_data <= {16'h3a18, 8'h00}; //AEC 增益上限8'd32: i2c_data <= {16'h3a19, 8'hf8}; //AEC 增益上限8'd33: i2c_data <= {16'h3635, 8'h13};8'd34: i2c_data <= {16'h3636, 8'h03};8'd35: i2c_data <= {16'h3634, 8'h40};8'd36: i2c_data <= {16'h3622, 8'h01};8'd37: i2c_data <= {16'h3c01, 8'h34};8'd38: i2c_data <= {16'h3c04, 8'h28};8'd39: i2c_data <= {16'h3c05, 8'h98};8'd40: i2c_data <= {16'h3c06, 8'h00}; //light meter 1 阈值[15:8]8'd41: i2c_data <= {16'h3c07, 8'h08}; //light meter 1 阈值[7:0]8'd42: i2c_data <= {16'h3c08, 8'h00}; //light meter 2 阈值[15:8]8'd43: i2c_data <= {16'h3c09, 8'h1c}; //light meter 2 阈值[7:0]8'd44: i2c_data <= {16'h3c0a, 8'h9c}; //sample number[15:8]8'd45: i2c_data <= {16'h3c0b, 8'h40}; //sample number[7:0]8'd46: i2c_data <= {16'h3810, 8'h00}; //Timing Hoffset[11:8]8'd47: i2c_data <= {16'h3811, 8'h10}; //Timing Hoffset[7:0]8'd48: i2c_data <= {16'h3812, 8'h00}; //Timing Voffset[10:8]8'd49: i2c_data <= {16'h3708, 8'h64};8'd50: i2c_data <= {16'h4001, 8'h02}; //BLC(黑电平校准)补偿起始行号8'd51: i2c_data <= {16'h4005, 8'h1a}; //BLC(黑电平校准)补偿始终更新8'd52: i2c_data <= {16'h3000, 8'h00}; //系统块复位控制8'd53: i2c_data <= {16'h3004, 8'hff}; //时钟使能控制8'd54: i2c_data <= {16'h4300, 8'h61}; //格式控制 RGB5658'd55: i2c_data <= {16'h501f, 8'h01}; //ISP RGB8'd56: i2c_data <= {16'h440e, 8'h00};8'd57: i2c_data <= {16'h5000, 8'ha7}; //ISP控制8'd58: i2c_data <= {16'h3a0f, 8'h30}; //AEC控制;stable range in high8'd59: i2c_data <= {16'h3a10, 8'h28}; //AEC控制;stable range in low8'd60: i2c_data <= {16'h3a1b, 8'h30}; //AEC控制;stable range out high8'd61: i2c_data <= {16'h3a1e, 8'h26}; //AEC控制;stable range out low8'd62: i2c_data <= {16'h3a11, 8'h60}; //AEC控制; fast zone high8'd63: i2c_data <= {16'h3a1f, 8'h14}; //AEC控制; fast zone low//LENC(镜头校正)控制 16'h5800~16'h583d8'd64: i2c_data <= {16'h5800, 8'h23};8'd65: i2c_data <= {16'h5801, 8'h14};8'd66: i2c_data <= {16'h5802, 8'h0f};8'd67: i2c_data <= {16'h5803, 8'h0f};8'd68: i2c_data <= {16'h5804, 8'h12};8'd69: i2c_data <= {16'h5805, 8'h26};8'd70: i2c_data <= {16'h5806, 8'h0c};8'd71: i2c_data <= {16'h5807, 8'h08};8'd72: i2c_data <= {16'h5808, 8'h05};8'd73: i2c_data <= {16'h5809, 8'h05};8'd74: i2c_data <= {16'h580a, 8'h08};8'd75: i2c_data <= {16'h580b, 8'h0d};8'd76: i2c_data <= {16'h580c, 8'h08};8'd77: i2c_data <= {16'h580d, 8'h03};8'd78: i2c_data <= {16'h580e, 8'h00};8'd79: i2c_data <= {16'h580f, 8'h00};8'd80: i2c_data <= {16'h5810, 8'h03};8'd81: i2c_data <= {16'h5811, 8'h09};8'd82: i2c_data <= {16'h5812, 8'h07};8'd83: i2c_data <= {16'h5813, 8'h03};8'd84: i2c_data <= {16'h5814, 8'h00};8'd85: i2c_data <= {16'h5815, 8'h01};8'd86: i2c_data <= {16'h5816, 8'h03};8'd87: i2c_data <= {16'h5817, 8'h08};8'd88: i2c_data <= {16'h5818, 8'h0d};8'd89: i2c_data <= {16'h5819, 8'h08};8'd90: i2c_data <= {16'h581a, 8'h05};8'd91: i2c_data <= {16'h581b, 8'h06};8'd92: i2c_data <= {16'h581c, 8'h08};8'd93: i2c_data <= {16'h581d, 8'h0e};8'd94: i2c_data <= {16'h581e, 8'h29};8'd95: i2c_data <= {16'h581f, 8'h17};8'd96: i2c_data <= {16'h5820, 8'h11};8'd97: i2c_data <= {16'h5821, 8'h11};8'd98: i2c_data <= {16'h5822, 8'h15};8'd99: i2c_data <= {16'h5823, 8'h28};8'd100: i2c_data <= {16'h5824, 8'h46};8'd101: i2c_data <= {16'h5825, 8'h26};8'd102: i2c_data <= {16'h5826, 8'h08};8'd103: i2c_data <= {16'h5827, 8'h26};8'd104: i2c_data <= {16'h5828, 8'h64};8'd105: i2c_data <= {16'h5829, 8'h26};8'd106: i2c_data <= {16'h582a, 8'h24};8'd107: i2c_data <= {16'h582b, 8'h22};8'd108: i2c_data <= {16'h582c, 8'h24};8'd109: i2c_data <= {16'h582d, 8'h24};8'd110: i2c_data <= {16'h582e, 8'h06};8'd111: i2c_data <= {16'h582f, 8'h22};8'd112: i2c_data <= {16'h5830, 8'h40};8'd113: i2c_data <= {16'h5831, 8'h42};8'd114: i2c_data <= {16'h5832, 8'h24};8'd115: i2c_data <= {16'h5833, 8'h26};8'd116: i2c_data <= {16'h5834, 8'h24};8'd117: i2c_data <= {16'h5835, 8'h22};8'd118: i2c_data <= {16'h5836, 8'h22};8'd119: i2c_data <= {16'h5837, 8'h26};8'd120: i2c_data <= {16'h5838, 8'h44};8'd121: i2c_data <= {16'h5839, 8'h24};8'd122: i2c_data <= {16'h583a, 8'h26};8'd123: i2c_data <= {16'h583b, 8'h28};8'd124: i2c_data <= {16'h583c, 8'h42};8'd125: i2c_data <= {16'h583d, 8'hce};//AWB(自动白平衡控制) 16'h5180~16'h519e8'd126: i2c_data <= {16'h5180, 8'hff};8'd127: i2c_data <= {16'h5181, 8'hf2};8'd128: i2c_data <= {16'h5182, 8'h00};8'd129: i2c_data <= {16'h5183, 8'h14};8'd130: i2c_data <= {16'h5184, 8'h25};8'd131: i2c_data <= {16'h5185, 8'h24};8'd132: i2c_data <= {16'h5186, 8'h09};8'd133: i2c_data <= {16'h5187, 8'h09};8'd134: i2c_data <= {16'h5188, 8'h09};8'd135: i2c_data <= {16'h5189, 8'h75};8'd136: i2c_data <= {16'h518a, 8'h54};8'd137: i2c_data <= {16'h518b, 8'he0};8'd138: i2c_data <= {16'h518c, 8'hb2};8'd139: i2c_data <= {16'h518d, 8'h42};8'd140: i2c_data <= {16'h518e, 8'h3d};8'd141: i2c_data <= {16'h518f, 8'h56};8'd142: i2c_data <= {16'h5190, 8'h46};8'd143: i2c_data <= {16'h5191, 8'hf8};8'd144: i2c_data <= {16'h5192, 8'h04};8'd145: i2c_data <= {16'h5193, 8'h70};8'd146: i2c_data <= {16'h5194, 8'hf0};8'd147: i2c_data <= {16'h5195, 8'hf0};8'd148: i2c_data <= {16'h5196, 8'h03};8'd149: i2c_data <= {16'h5197, 8'h01};8'd150: i2c_data <= {16'h5198, 8'h04};8'd151: i2c_data <= {16'h5199, 8'h12};8'd152: i2c_data <= {16'h519a, 8'h04};8'd153: i2c_data <= {16'h519b, 8'h00};8'd154: i2c_data <= {16'h519c, 8'h06};8'd155: i2c_data <= {16'h519d, 8'h82};8'd156: i2c_data <= {16'h519e, 8'h38};//Gamma(伽马)控制 16'h5480~16'h54908'd157: i2c_data <= {16'h5480, 8'h01};8'd158: i2c_data <= {16'h5481, 8'h08};8'd159: i2c_data <= {16'h5482, 8'h14};8'd160: i2c_data <= {16'h5483, 8'h28};8'd161: i2c_data <= {16'h5484, 8'h51};8'd162: i2c_data <= {16'h5485, 8'h65};8'd163: i2c_data <= {16'h5486, 8'h71};8'd164: i2c_data <= {16'h5487, 8'h7d};8'd165: i2c_data <= {16'h5488, 8'h87};8'd166: i2c_data <= {16'h5489, 8'h91};8'd167: i2c_data <= {16'h548a, 8'h9a};8'd168: i2c_data <= {16'h548b, 8'haa};8'd169: i2c_data <= {16'h548c, 8'hb8};8'd170: i2c_data <= {16'h548d, 8'hcd};8'd171: i2c_data <= {16'h548e, 8'hdd};8'd172: i2c_data <= {16'h548f, 8'hea};8'd173: i2c_data <= {16'h5490, 8'h1d};//CMX(彩色矩阵控制) 16'h5381~16'h538b8'd174: i2c_data <= {16'h5381, 8'h1e};8'd175: i2c_data <= {16'h5382, 8'h5b};8'd176: i2c_data <= {16'h5383, 8'h08};8'd177: i2c_data <= {16'h5384, 8'h0a};8'd178: i2c_data <= {16'h5385, 8'h7e};8'd179: i2c_data <= {16'h5386, 8'h88};8'd180: i2c_data <= {16'h5387, 8'h7c};8'd181: i2c_data <= {16'h5388, 8'h6c};8'd182: i2c_data <= {16'h5389, 8'h10};8'd183: i2c_data <= {16'h538a, 8'h01};8'd184: i2c_data <= {16'h538b, 8'h98};//SDE(特殊数码效果)控制 16'h5580~16'h558b8'd185: i2c_data <= {16'h5580, 8'h06};8'd186: i2c_data <= {16'h5583, 8'h40};8'd187: i2c_data <= {16'h5584, 8'h10};8'd188: i2c_data <= {16'h5589, 8'h10};8'd189: i2c_data <= {16'h558a, 8'h00};8'd190: i2c_data <= {16'h558b, 8'hf8};8'd191: i2c_data <= {16'h501d, 8'h40}; //ISP MISC//CIP(颜色插值)控制 (16'h5300~16'h530c)8'd192: i2c_data <= {16'h5300, 8'h08};8'd193: i2c_data <= {16'h5301, 8'h30};8'd194: i2c_data <= {16'h5302, 8'h10};8'd195: i2c_data <= {16'h5303, 8'h00};8'd196: i2c_data <= {16'h5304, 8'h08};8'd197: i2c_data <= {16'h5305, 8'h30};8'd198: i2c_data <= {16'h5306, 8'h08};8'd199: i2c_data <= {16'h5307, 8'h16};8'd200: i2c_data <= {16'h5309, 8'h08};8'd201: i2c_data <= {16'h530a, 8'h30};8'd202: i2c_data <= {16'h530b, 8'h04};8'd203: i2c_data <= {16'h530c, 8'h06};8'd204: i2c_data <= {16'h5025, 8'h00};//系统时钟分频 Bit[7:4]:系统时钟分频 input clock =24Mhz, PCLK = 48Mhz8'd205: i2c_data <= {16'h3035, 8'h11};8'd206: i2c_data <= {16'h3036, 8'h3c}; //PLL倍频8'd207: i2c_data <= {16'h3c07, 8'h08};//时序控制 16'h3800~16'h38218'd208: i2c_data <= {16'h3820, 8'h46};8'd209: i2c_data <= {16'h3821, 8'h01};8'd210: i2c_data <= {16'h3814, 8'h31};8'd211: i2c_data <= {16'h3815, 8'h31};8'd212: i2c_data <= {16'h3800, 8'h00};8'd213: i2c_data <= {16'h3801, 8'h00};8'd214: i2c_data <= {16'h3802, 8'h00};8'd215: i2c_data <= {16'h3803, 8'h04};8'd216: i2c_data <= {16'h3804, 8'h0a};8'd217: i2c_data <= {16'h3805, 8'h3f};8'd218: i2c_data <= {16'h3806, 8'h07};8'd219: i2c_data <= {16'h3807, 8'h9b};//设置输出像素个数//DVP 输出水平像素点数高4位8'd220: i2c_data <= {16'h3808, {4'd0, cmos_h_pixel[11:8]}};//DVP 输出水平像素点数低8位8'd221: i2c_data <= {16'h3809, cmos_h_pixel[7:0]};//DVP 输出垂直像素点数高3位8'd222: i2c_data <= {16'h380a, {5'd0, cmos_v_pixel[10:8]}};//DVP 输出垂直像素点数低8位8'd223: i2c_data <= {16'h380b, cmos_v_pixel[7:0]};//水平总像素大小高5位8'd224: i2c_data <= {16'h380c, {3'd0, total_h_pixel[12:8]}};//水平总像素大小低8位 8'd225: i2c_data <= {16'h380d, total_h_pixel[7:0]};//垂直总像素大小高5位 8'd226: i2c_data <= {16'h380e, {3'd0, total_v_pixel[12:8]}};//垂直总像素大小低8位 8'd227: i2c_data <= {16'h380f, total_v_pixel[7:0]};8'd228: i2c_data <= {16'h3813, 8'h06};8'd229: i2c_data <= {16'h3618, 8'h00};8'd230: i2c_data <= {16'h3612, 8'h29};8'd231: i2c_data <= {16'h3709, 8'h52};8'd232: i2c_data <= {16'h370c, 8'h03};8'd233: i2c_data <= {16'h3a02, 8'h17}; //60Hz max exposure8'd234: i2c_data <= {16'h3a03, 8'h10}; //60Hz max exposure8'd235: i2c_data <= {16'h3a14, 8'h17}; //50Hz max exposure8'd236: i2c_data <= {16'h3a15, 8'h10}; //50Hz max exposure8'd237: i2c_data <= {16'h4004, 8'h02}; //BLC(背光) 2 lines8'd238: i2c_data <= {16'h4713, 8'h03}; //JPEG mode 38'd239: i2c_data <= {16'h4407, 8'h04}; //量化标度8'd240: i2c_data <= {16'h460c, 8'h22};8'd241: i2c_data <= {16'h4837, 8'h22}; //DVP CLK divider8'd242: i2c_data <= {16'h3824, 8'h02}; //DVP CLK divider8'd243: i2c_data <= {16'h5001, 8'ha3}; //ISP 控制8'd244: i2c_data <= {16'h3b07, 8'h0a}; //帧曝光模式 //彩条测试使能 8'd245: i2c_data <= {16'h503d, 8'h00}; //8'h00:正常模式 8'h80:彩条显示//测试闪光灯功能8'd246: i2c_data <= {16'h3016, 8'h02};8'd247: i2c_data <= {16'h301c, 8'h02};8'd248: i2c_data <= {16'h3019, 8'h02}; //打开闪光灯8'd249: i2c_data <= {16'h3019, 8'h00}; //关闭闪光灯//只读存储器,防止在case中没有列举的情况,之前的寄存器被重复改写default: i2c_data <= {16'h300a, 8'h00}; //器件ID高8位endcaseendendendmodule
2.4 iic驱动模块
`timescale 1ns / 1ps
//IIC驱动模块module i2c_dri #(parameter SLAVE_ADDR = 7'b1010000 , //EEPROM从机地址parameter CLK_FREQ = 26'd50_000_000, //模块输入的时钟频率parameter I2C_FREQ = 18'd250_000 //IIC_SCL的时钟频率
) (input clk,input rst_n,//i2c interface input i2c_exec, //I2C触发执行信号input bit_ctrl, //字地址位控制(16b/8b)input i2c_rh_wl, //I2C读写控制信号input [15:0] i2c_addr, //I2C器件内地址input [ 7:0] i2c_data_w, //I2C要写的数据output reg [ 7:0] i2c_data_r, //I2C读出的数据output reg i2c_done, //I2C一次操作完成output reg i2c_ack, //I2C应答标志 0:应答 1:未应答output reg scl, //I2C的SCL时钟信号inout sda, //I2C的SDA信号//user interface output reg dri_clk //驱动I2C操作的驱动时钟
);//localparam definelocalparam st_idle = 8'b0000_0001; //空闲状态localparam st_sladdr = 8'b0000_0010; //发送器件地址(slave address)localparam st_addr16 = 8'b0000_0100; //发送16位字地址localparam st_addr8 = 8'b0000_1000; //发送8位字地址localparam st_data_wr = 8'b0001_0000; //写数据(8 bit)localparam st_addr_rd = 8'b0010_0000; //发送器件地址读localparam st_data_rd = 8'b0100_0000; //读数据(8 bit)localparam st_stop = 8'b1000_0000; //结束I2C操作//reg definereg sda_dir; //I2C数据(SDA)方向控制reg sda_out; //SDA输出信号reg st_done; //状态结束reg wr_flag; //写标志reg [ 6:0] cnt; //计数reg [ 7:0] cur_state; //状态机当前状态reg [ 7:0] next_state; //状态机下一状态reg [15:0] addr_t; //地址reg [ 7:0] data_r; //读取的数据reg [ 7:0] data_wr_t; //I2C需写的数据的临时寄存reg [ 9:0] clk_cnt; //分频时钟计数//wire definewire sda_in; //SDA输入信号wire [ 8:0] clk_divide; //模块驱动时钟的分频系数//*****************************************************//** main code//*****************************************************//SDA控制assign sda = sda_dir ? sda_out : 1'bz; //SDA数据输出或高阻assign sda_in = sda; //SDA数据输入assign clk_divide = (CLK_FREQ / I2C_FREQ) >> 2'd2; //模块驱动时钟的分频系数//生成I2C的SCL的四倍频率的驱动时钟用于驱动i2c的操作always @(posedge clk or negedge rst_n) beginif (!rst_n) begindri_clk <= 1'b0;clk_cnt <= 10'd0;end else if (clk_cnt == clk_divide[8:1] - 1'd1) beginclk_cnt <= 10'd0;dri_clk <= ~dri_clk;end else clk_cnt <= clk_cnt + 1'b1;end//(三段式状态机)同步时序描述状态转移always @(posedge dri_clk or negedge rst_n) beginif (!rst_n) cur_state <= st_idle;else cur_state <= next_state;end//组合逻辑判断状态转移条件always @(*) beginnext_state = st_idle;case (cur_state)st_idle: begin //空闲状态if (i2c_exec) beginnext_state = st_sladdr;end else next_state = st_idle;endst_sladdr: beginif (st_done) beginif (bit_ctrl) //判断是16位还是8位字地址next_state = st_addr16;else next_state = st_addr8;end else next_state = st_sladdr;endst_addr16: begin //写16位字地址if (st_done) beginnext_state = st_addr8;end else beginnext_state = st_addr16;endendst_addr8: begin //8位字地址if (st_done) beginif (wr_flag == 1'b0) //读写判断next_state = st_data_wr;else next_state = st_addr_rd;end else beginnext_state = st_addr8;endendst_data_wr: begin //写数据(8 bit)if (st_done) next_state = st_stop;else next_state = st_data_wr;endst_addr_rd: begin //写地址以进行读数据if (st_done) beginnext_state = st_data_rd;end else beginnext_state = st_addr_rd;endendst_data_rd: begin //读取数据(8 bit)if (st_done) next_state = st_stop;else next_state = st_data_rd;endst_stop: begin //结束I2C操作if (st_done) next_state = st_idle;else next_state = st_stop;enddefault: next_state = st_idle;endcaseend//时序电路描述状态输出always @(posedge dri_clk or negedge rst_n) begin//复位初始化if (!rst_n) beginscl <= 1'b1;sda_out <= 1'b1;sda_dir <= 1'b1;i2c_done <= 1'b0;i2c_ack <= 1'b0;cnt <= 1'b0;st_done <= 1'b0;data_r <= 1'b0;i2c_data_r <= 1'b0;wr_flag <= 1'b0;addr_t <= 1'b0;data_wr_t <= 1'b0;end else beginst_done <= 1'b0;cnt <= cnt + 1'b1;case (cur_state)st_idle: begin //空闲状态scl <= 1'b1;sda_out <= 1'b1;sda_dir <= 1'b1;i2c_done <= 1'b0;cnt <= 7'b0;if (i2c_exec) beginwr_flag <= i2c_rh_wl ;addr_t <= i2c_addr ;data_wr_t <= i2c_data_w;i2c_ack <= 1'b0;endendst_sladdr: begin //写地址(器件地址和字地址)case (cnt)7'd1: sda_out <= 1'b0; //开始I2C7'd3: scl <= 1'b0;7'd4: sda_out <= SLAVE_ADDR[6]; //传送器件地址7'd5: scl <= 1'b1;7'd7: scl <= 1'b0;7'd8: sda_out <= SLAVE_ADDR[5];7'd9: scl <= 1'b1;7'd11: scl <= 1'b0;7'd12: sda_out <= SLAVE_ADDR[4];7'd13: scl <= 1'b1;7'd15: scl <= 1'b0;7'd16: sda_out <= SLAVE_ADDR[3];7'd17: scl <= 1'b1;7'd19: scl <= 1'b0;7'd20: sda_out <= SLAVE_ADDR[2];7'd21: scl <= 1'b1;7'd23: scl <= 1'b0;7'd24: sda_out <= SLAVE_ADDR[1];7'd25: scl <= 1'b1;7'd27: scl <= 1'b0;7'd28: sda_out <= SLAVE_ADDR[0];7'd29: scl <= 1'b1;7'd31: scl <= 1'b0;7'd32: sda_out <= 1'b0; //0:写7'd33: scl <= 1'b1;7'd35: scl <= 1'b0;7'd36: beginsda_dir <= 1'b0;sda_out <= 1'b1;end7'd37: scl <= 1'b1;7'd38: begin //从机应答 st_done <= 1'b1;if (sda_in == 1'b1) //高电平表示未应答i2c_ack <= 1'b1; //拉高应答标志位 end7'd39: beginscl <= 1'b0;cnt <= 1'b0;enddefault: ;endcaseendst_addr16: begincase (cnt)7'd0: beginsda_dir <= 1'b1;sda_out <= addr_t[15]; //传送字地址end7'd1: scl <= 1'b1;7'd3: scl <= 1'b0;7'd4: sda_out <= addr_t[14];7'd5: scl <= 1'b1;7'd7: scl <= 1'b0;7'd8: sda_out <= addr_t[13];7'd9: scl <= 1'b1;7'd11: scl <= 1'b0;7'd12: sda_out <= addr_t[12];7'd13: scl <= 1'b1;7'd15: scl <= 1'b0;7'd16: sda_out <= addr_t[11];7'd17: scl <= 1'b1;7'd19: scl <= 1'b0;7'd20: sda_out <= addr_t[10];7'd21: scl <= 1'b1;7'd23: scl <= 1'b0;7'd24: sda_out <= addr_t[9];7'd25: scl <= 1'b1;7'd27: scl <= 1'b0;7'd28: sda_out <= addr_t[8];7'd29: scl <= 1'b1;7'd31: scl <= 1'b0;7'd32: beginsda_dir <= 1'b0;sda_out <= 1'b1;end7'd33: scl <= 1'b1;7'd34: begin //从机应答st_done <= 1'b1;if (sda_in == 1'b1) //高电平表示未应答i2c_ack <= 1'b1; //拉高应答标志位 end7'd35: beginscl <= 1'b0;cnt <= 1'b0;enddefault: ;endcaseendst_addr8: begincase (cnt)7'd0: beginsda_dir <= 1'b1;sda_out <= addr_t[7]; //字地址end7'd1: scl <= 1'b1;7'd3: scl <= 1'b0;7'd4: sda_out <= addr_t[6];7'd5: scl <= 1'b1;7'd7: scl <= 1'b0;7'd8: sda_out <= addr_t[5];7'd9: scl <= 1'b1;7'd11: scl <= 1'b0;7'd12: sda_out <= addr_t[4];7'd13: scl <= 1'b1;7'd15: scl <= 1'b0;7'd16: sda_out <= addr_t[3];7'd17: scl <= 1'b1;7'd19: scl <= 1'b0;7'd20: sda_out <= addr_t[2];7'd21: scl <= 1'b1;7'd23: scl <= 1'b0;7'd24: sda_out <= addr_t[1];7'd25: scl <= 1'b1;7'd27: scl <= 1'b0;7'd28: sda_out <= addr_t[0];7'd29: scl <= 1'b1;7'd31: scl <= 1'b0;7'd32: beginsda_dir <= 1'b0;sda_out <= 1'b1;end7'd33: scl <= 1'b1;7'd34: begin //从机应答st_done <= 1'b1;if (sda_in == 1'b1) //高电平表示未应答i2c_ack <= 1'b1; //拉高应答标志位 end7'd35: beginscl <= 1'b0;cnt <= 1'b0;enddefault: ;endcaseendst_data_wr: begin //写数据(8 bit)case (cnt)7'd0: beginsda_out <= data_wr_t[7]; //I2C写8位数据sda_dir <= 1'b1;end7'd1: scl <= 1'b1;7'd3: scl <= 1'b0;7'd4: sda_out <= data_wr_t[6];7'd5: scl <= 1'b1;7'd7: scl <= 1'b0;7'd8: sda_out <= data_wr_t[5];7'd9: scl <= 1'b1;7'd11: scl <= 1'b0;7'd12: sda_out <= data_wr_t[4];7'd13: scl <= 1'b1;7'd15: scl <= 1'b0;7'd16: sda_out <= data_wr_t[3];7'd17: scl <= 1'b1;7'd19: scl <= 1'b0;7'd20: sda_out <= data_wr_t[2];7'd21: scl <= 1'b1;7'd23: scl <= 1'b0;7'd24: sda_out <= data_wr_t[1];7'd25: scl <= 1'b1;7'd27: scl <= 1'b0;7'd28: sda_out <= data_wr_t[0];7'd29: scl <= 1'b1;7'd31: scl <= 1'b0;7'd32: beginsda_dir <= 1'b0;sda_out <= 1'b1;end7'd33: scl <= 1'b1;7'd34: begin //从机应答st_done <= 1'b1;if (sda_in == 1'b1) //高电平表示未应答i2c_ack <= 1'b1; //拉高应答标志位 end7'd35: beginscl <= 1'b0;cnt <= 1'b0;enddefault: ;endcaseendst_addr_rd: begin //写地址以进行读数据case (cnt)7'd0: beginsda_dir <= 1'b1;sda_out <= 1'b1;end7'd1: scl <= 1'b1;7'd2: sda_out <= 1'b0; //重新开始7'd3: scl <= 1'b0;7'd4: sda_out <= SLAVE_ADDR[6]; //传送器件地址7'd5: scl <= 1'b1;7'd7: scl <= 1'b0;7'd8: sda_out <= SLAVE_ADDR[5];7'd9: scl <= 1'b1;7'd11: scl <= 1'b0;7'd12: sda_out <= SLAVE_ADDR[4];7'd13: scl <= 1'b1;7'd15: scl <= 1'b0;7'd16: sda_out <= SLAVE_ADDR[3];7'd17: scl <= 1'b1;7'd19: scl <= 1'b0;7'd20: sda_out <= SLAVE_ADDR[2];7'd21: scl <= 1'b1;7'd23: scl <= 1'b0;7'd24: sda_out <= SLAVE_ADDR[1];7'd25: scl <= 1'b1;7'd27: scl <= 1'b0;7'd28: sda_out <= SLAVE_ADDR[0];7'd29: scl <= 1'b1;7'd31: scl <= 1'b0;7'd32: sda_out <= 1'b1; //1:读7'd33: scl <= 1'b1;7'd35: scl <= 1'b0;7'd36: beginsda_dir <= 1'b0;sda_out <= 1'b1;end7'd37: scl <= 1'b1;7'd38: begin //从机应答st_done <= 1'b1;if (sda_in == 1'b1) //高电平表示未应答i2c_ack <= 1'b1; //拉高应答标志位 end7'd39: beginscl <= 1'b0;cnt <= 1'b0;enddefault: ;endcaseendst_data_rd: begin //读取数据(8 bit)case (cnt)7'd0: sda_dir <= 1'b0;7'd1: begindata_r[7] <= sda_in;scl <= 1'b1;end7'd3: scl <= 1'b0;7'd5: begindata_r[6] <= sda_in;scl <= 1'b1;end7'd7: scl <= 1'b0;7'd9: begindata_r[5] <= sda_in;scl <= 1'b1;end7'd11: scl <= 1'b0;7'd13: begindata_r[4] <= sda_in;scl <= 1'b1;end7'd15: scl <= 1'b0;7'd17: begindata_r[3] <= sda_in;scl <= 1'b1;end7'd19: scl <= 1'b0;7'd21: begindata_r[2] <= sda_in;scl <= 1'b1;end7'd23: scl <= 1'b0;7'd25: begindata_r[1] <= sda_in;scl <= 1'b1;end7'd27: scl <= 1'b0;7'd29: begindata_r[0] <= sda_in;scl <= 1'b1;end7'd31: scl <= 1'b0;7'd32: beginsda_dir <= 1'b1;sda_out <= 1'b1;end7'd33: scl <= 1'b1;7'd34: st_done <= 1'b1; //非应答7'd35: beginscl <= 1'b0;cnt <= 1'b0;i2c_data_r <= data_r;enddefault: ;endcaseendst_stop: begin //结束I2C操作case (cnt)7'd0: beginsda_dir <= 1'b1; //结束I2Csda_out <= 1'b0;end7'd1: scl <= 1'b1;7'd3: sda_out <= 1'b1;7'd15: st_done <= 1'b1;7'd16: begincnt <= 1'b0;i2c_done <= 1'b1; //向上层模块传递I2C结束信号enddefault: ;endcaseendendcaseendendendmodule
2.5 图像数据采集模块
`timescale 1ns / 1ps
//摄像头采集模块module cmos_capture_data (input rst_n, //复位信号 //摄像头接口 input cam_pclk, //cmos 数据像素时钟input cam_vsync, //cmos 场同步信号input cam_href, //cmos 行同步信号input [ 7:0] cam_data,//用户接口 output cmos_frame_vsync, //帧有效信号 output cmos_frame_href, //行有效信号output cmos_frame_valid, //数据有效使能信号output [15:0] cmos_frame_data //有效数据
);//寄存器全部配置完成后,先等待10帧数据//待寄存器配置生效后再开始采集图像parameter WAIT_FRAME = 4'd10; //寄存器数据稳定等待的帧个数 //reg define reg cam_vsync_d0;reg cam_vsync_d1;reg cam_href_d0;reg cam_href_d1;reg [ 3:0] cmos_ps_cnt; //等待帧数稳定计数器reg [ 7:0] cam_data_d0;reg [15:0] cmos_data_t; //用于8位转16位的临时寄存器reg byte_flag; //16位RGB数据转换完成的标志信号reg byte_flag_d0;reg frame_val_flag; //帧有效的标志 wire pos_vsync; //采输入场同步信号的上升沿//*****************************************************//** main code//*****************************************************//采输入场同步信号的上升沿assign pos_vsync = (~cam_vsync_d1) & cam_vsync_d0;//输出帧有效信号assign cmos_frame_vsync = frame_val_flag ? cam_vsync_d1 : 1'b0;//输出行有效信号assign cmos_frame_href = frame_val_flag ? cam_href_d1 : 1'b0;//输出数据使能有效信号assign cmos_frame_valid = frame_val_flag ? byte_flag_d0 : 1'b0;//输出数据assign cmos_frame_data = frame_val_flag ? cmos_data_t : 1'b0;always @(posedge cam_pclk or negedge rst_n) beginif (!rst_n) begincam_vsync_d0 <= 1'b0;cam_vsync_d1 <= 1'b0;cam_href_d0 <= 1'b0;cam_href_d1 <= 1'b0;end else begincam_vsync_d0 <= cam_vsync;cam_vsync_d1 <= cam_vsync_d0;cam_href_d0 <= cam_href;cam_href_d1 <= cam_href_d0;endend//对帧数进行计数always @(posedge cam_pclk or negedge rst_n) beginif (!rst_n) cmos_ps_cnt <= 4'd0;else if (pos_vsync && (cmos_ps_cnt < WAIT_FRAME)) cmos_ps_cnt <= cmos_ps_cnt + 4'd1;end//帧有效标志always @(posedge cam_pclk or negedge rst_n) beginif (!rst_n) frame_val_flag <= 1'b0;else if ((cmos_ps_cnt == WAIT_FRAME) && pos_vsync) frame_val_flag <= 1'b1;else;end//8位数据转16位RGB565数据 always @(posedge cam_pclk or negedge rst_n) beginif (!rst_n) begincmos_data_t <= 16'd0;cam_data_d0 <= 8'd0;byte_flag <= 1'b0;end else if (cam_href) beginbyte_flag <= ~byte_flag;cam_data_d0 <= cam_data;if (byte_flag) cmos_data_t <= {cam_data_d0, cam_data};else;end else beginbyte_flag <= 1'b0;cam_data_d0 <= 8'b0;endend//产生输出数据有效信号(cmos_frame_valid)always @(posedge cam_pclk or negedge rst_n) beginif (!rst_n) byte_flag_d0 <= 1'b0;else byte_flag_d0 <= byte_flag;endendmodule
2.6 图像传输控制模块
`timescale 1ns / 1ps
//图像传输控制模块module start_transfer_ctrl (input clk, //GMII接收时钟 input rst_n, //复位信号,低电平有效input udp_rec_pkt_done, //UDP单包数据接收完成信号input udp_rec_en, //UDP接收的数据使能信号 input [31:0] udp_rec_data, //UDP接收的数据input [15:0] udp_rec_byte_num, //UDP接收到的字节数 output reg transfer_flag //图像开始传输标志,0:开始传输 1:停止传输
);//parameter defineparameter START = "1"; //开始命令parameter STOP = "0"; //停止命令//*****************************************************//** main code//*****************************************************//解析接收到的数据always @(posedge clk or negedge rst_n) beginif (!rst_n) transfer_flag <= 1'b0;else if (udp_rec_pkt_done && udp_rec_byte_num == 1'b1) beginif (udp_rec_data[31:24] == START) //开始传输transfer_flag <= 1'b1;else if (udp_rec_data[31:24] == STOP) //停止传输transfer_flag <= 1'b0;endendendmodule
2.7 图像封装模块
`timescale 1ns / 1ps
//图像封装模块 module img_data_pkt (input rst_n, //复位信号,低电平有效//图像相关信号input cam_pclk, //像素时钟input img_vsync, //帧同步信号input img_data_en, //数据有效使能信号input [15:0] img_data, //有效数据 input transfer_flag, //图像开始传输标志,0:开始传输 1:停止传输//以太网相关信号 input eth_tx_clk, //以太网发送时钟input udp_tx_req, //udp发送数据请求信号input udp_tx_done, //udp发送数据完成信号 output reg udp_tx_start_en, //udp开始发送信号output [31:0] udp_tx_data, //udp发送的数据output reg [15:0] udp_tx_byte_num //udp单包发送的有效字节数
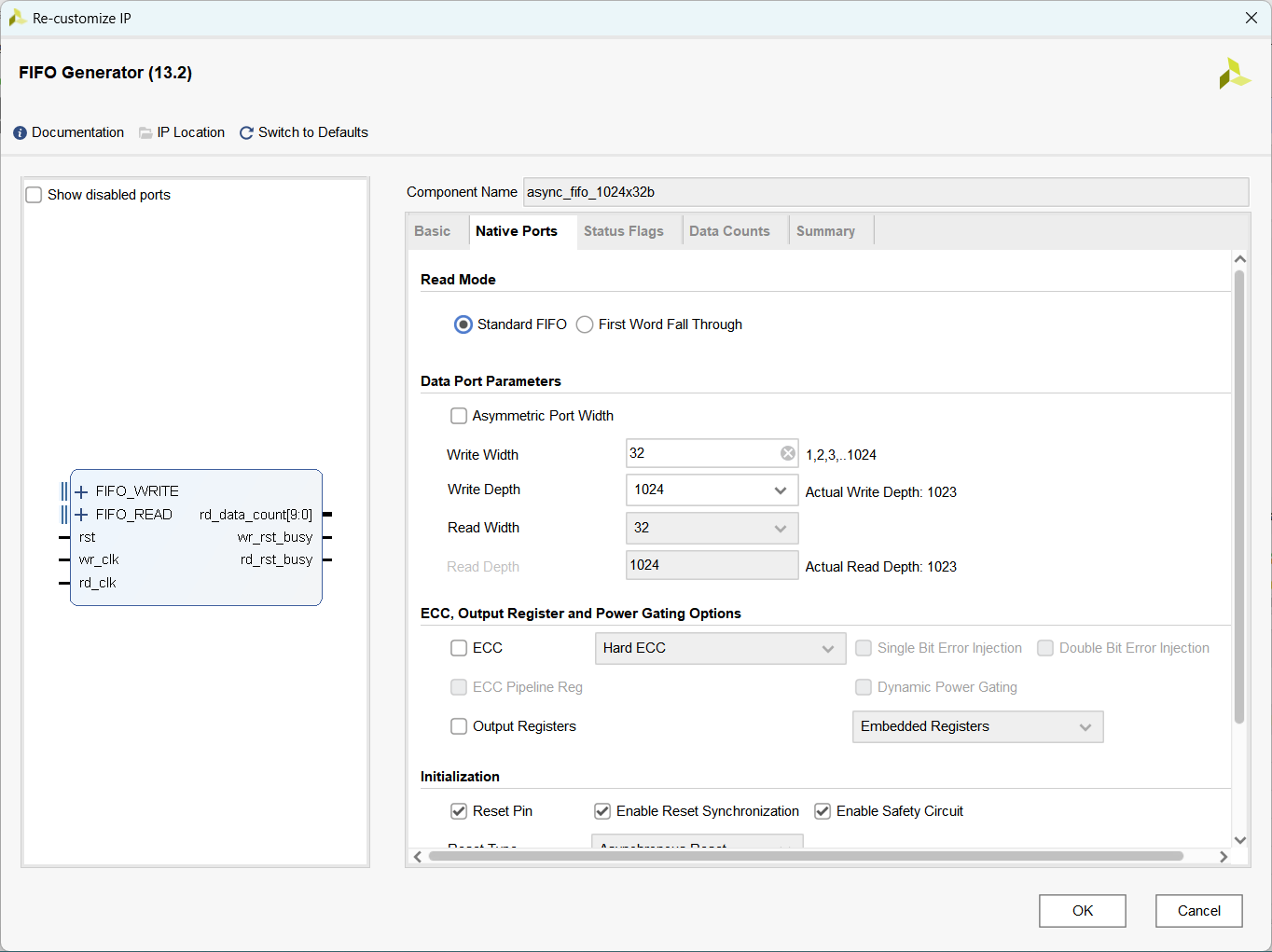
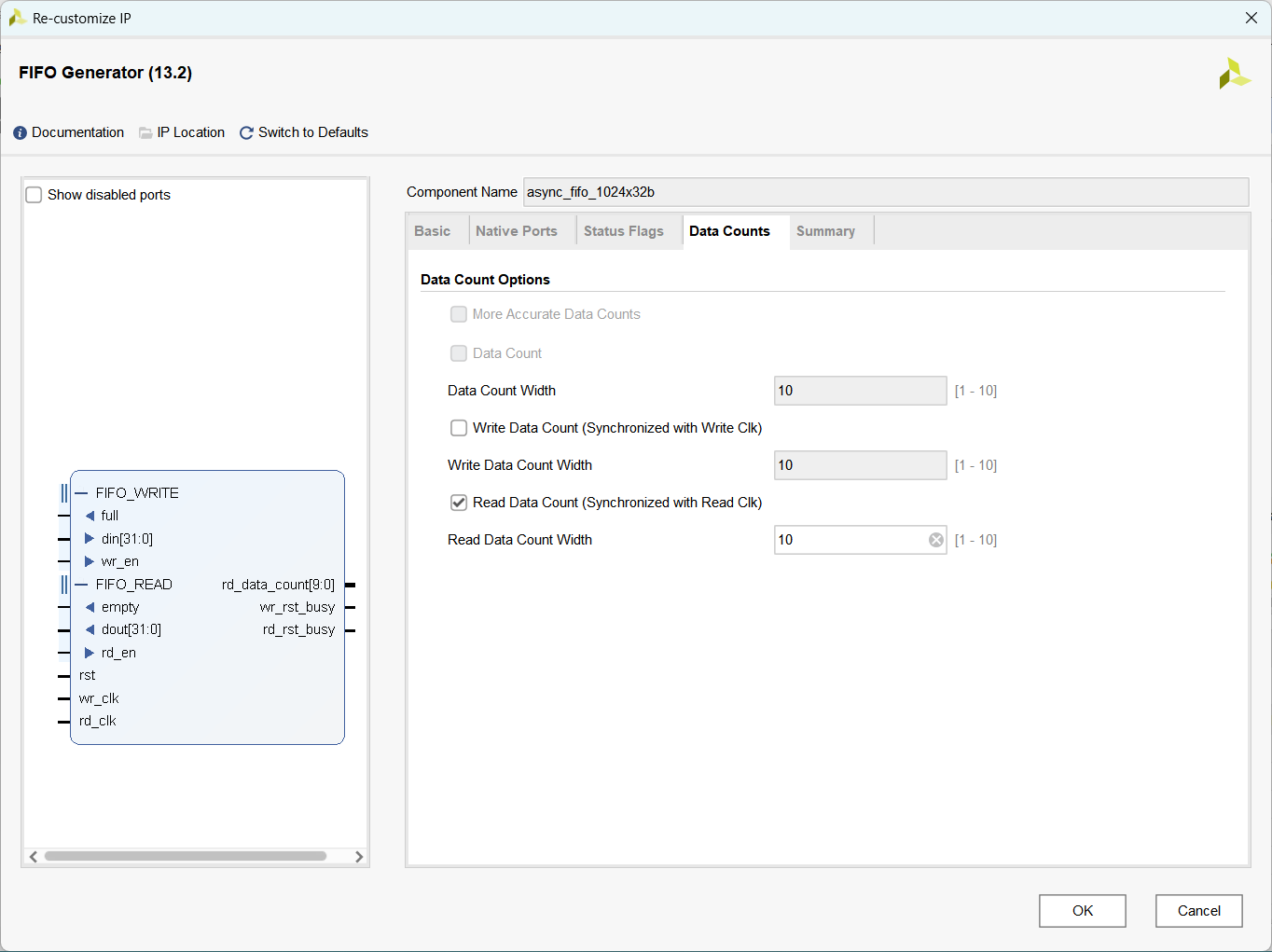
);//parameter defineparameter CMOS_H_PIXEL = 16'd640; //图像水平方向分辨率parameter CMOS_V_PIXEL = 16'd480; //图像垂直方向分辨率//图像帧头,用于标志一帧数据的开始parameter IMG_FRAME_HEAD = {32'hf0_5a_a5_0f};reg img_vsync_d0; //帧有效信号打拍reg img_vsync_d1; //帧有效信号打拍reg neg_vsync_d0; //帧有效信号下降沿打拍reg wr_sw; //用于位拼接的标志reg [15:0] img_data_d0; //有效图像数据打拍reg wr_fifo_en; //写fifo使能reg [31:0] wr_fifo_data; //写fifo数据reg img_vsync_txc_d0; //以太网发送时钟域下,帧有效信号打拍reg img_vsync_txc_d1; //以太网发送时钟域下,帧有效信号打拍reg tx_busy_flag; //发送忙信号标志//wire define wire pos_vsync; //帧有效信号上升沿wire neg_vsync; //帧有效信号下降沿wire neg_vsynt_txc; //以太网发送时钟域下,帧有效信号下降沿wire [ 9:0] fifo_rdusedw; //当前FIFO缓存的个数//*****************************************************//** main code//*****************************************************//信号采沿assign neg_vsync = img_vsync_d1 & (~img_vsync_d0);assign pos_vsync = ~img_vsync_d1 & img_vsync_d0;assign neg_vsynt_txc = ~img_vsync_txc_d1 & img_vsync_txc_d0;//对img_vsync信号延时两个时钟周期,用于采沿always @(posedge cam_pclk or negedge rst_n) beginif (!rst_n) beginimg_vsync_d0 <= 1'b0;img_vsync_d1 <= 1'b0;end else beginimg_vsync_d0 <= img_vsync;img_vsync_d1 <= img_vsync_d0;endend//寄存neg_vsync信号always @(posedge cam_pclk or negedge rst_n) beginif (!rst_n) neg_vsync_d0 <= 1'b0;else neg_vsync_d0 <= neg_vsync;end//对wr_sw和img_data_d0信号赋值,用于位拼接always @(posedge cam_pclk or negedge rst_n) beginif (!rst_n) beginwr_sw <= 1'b0;img_data_d0 <= 1'b0;end else if (neg_vsync) wr_sw <= 1'b0;else if (img_data_en) beginwr_sw <= ~wr_sw;img_data_d0 <= img_data;endend//将帧头和图像数据写入FIFOalways @(posedge cam_pclk or negedge rst_n) beginif (!rst_n) beginwr_fifo_en <= 1'b0;wr_fifo_data <= 1'b0;end else beginif (neg_vsync) beginwr_fifo_en <= 1'b1;wr_fifo_data <= IMG_FRAME_HEAD; //帧头end else if (neg_vsync_d0) beginwr_fifo_en <= 1'b1;wr_fifo_data <= {CMOS_H_PIXEL, CMOS_V_PIXEL}; //水平和垂直方向分辨率end else if (img_data_en && wr_sw) beginwr_fifo_en <= 1'b1;wr_fifo_data <= {img_data_d0, img_data}; //图像数据位拼接,16位转32位end else beginwr_fifo_en <= 1'b0;wr_fifo_data <= 1'b0;endendend//以太网发送时钟域下,对img_vsync信号延时两个时钟周期,用于采沿always @(posedge eth_tx_clk or negedge rst_n) beginif (!rst_n) beginimg_vsync_txc_d0 <= 1'b0;img_vsync_txc_d1 <= 1'b0;end else beginimg_vsync_txc_d0 <= img_vsync;img_vsync_txc_d1 <= img_vsync_txc_d0;endend//控制以太网发送的字节数always @(posedge eth_tx_clk or negedge rst_n) beginif (!rst_n) udp_tx_byte_num <= 1'b0;else if (neg_vsynt_txc) udp_tx_byte_num <= {CMOS_H_PIXEL, 1'b0} + 16'd8;else if (udp_tx_done) udp_tx_byte_num <= {CMOS_H_PIXEL, 1'b0};end//控制以太网发送开始信号always @(posedge eth_tx_clk or negedge rst_n) beginif (!rst_n) beginudp_tx_start_en <= 1'b0;tx_busy_flag <= 1'b0;end //上位机未发送"开始"命令时,以太网不发送图像数据else if (transfer_flag == 1'b0) beginudp_tx_start_en <= 1'b0;tx_busy_flag <= 1'b0;end else beginudp_tx_start_en <= 1'b0;//当FIFO中的个数满足需要发送的字节数时if (tx_busy_flag == 1'b0 && fifo_rdusedw >= udp_tx_byte_num[15:2]) beginudp_tx_start_en <= 1'b1; //开始控制发送一包数据tx_busy_flag <= 1'b1;end else if (udp_tx_done || neg_vsynt_txc) tx_busy_flag <= 1'b0;endend//异步FIFOasync_fifo_1024x32b async_fifo_1024x32b_inst (.rst (pos_vsync | (~transfer_flag)), // input wire rst.wr_clk (cam_pclk), // input wire wr_clk.rd_clk (eth_tx_clk), // input wire rd_clk.din (wr_fifo_data), // input wire [31 : 0] din.wr_en (wr_fifo_en), // input wire wr_en.rd_en (udp_tx_req), // input wire rd_en.dout (udp_tx_data), // output wire [31 : 0] dout.full (), // output wire full.empty (), // output wire empty.rd_data_count(fifo_rdusedw), // output wire [9 : 0] rd_data_count.wr_rst_busy (), // output wire wr_rst_busy.rd_rst_busy () // output wire rd_rst_busy);endmodule

2.8 以太网顶层模块
`timescale 1ns / 1ps
//以太网UDP通信顶层模块module eth_top (input sys_rst_n, //系统复位信号,低电平有效 //以太网RGMII接口 input eth_rxc, //RGMII接收数据时钟input eth_rx_ctl, //RGMII输入数据有效信号input [3:0] eth_rxd, //RGMII输入数据output eth_txc, //RGMII发送数据时钟 output eth_tx_ctl, //RGMII输出数据有效信号output [3:0] eth_txd, //RGMII输出数据 input gmii_tx_clk, //GMII发送时钟input udp_tx_start_en, //以太网开始发送信号 input [31:0] tx_data, //以太网待发送数据 input [15:0] tx_byte_num, //以太网发送的有效字节数 单位:byte output udp_tx_done, //UDP发送完成信号 output tx_req, //读数据请求信号 output gmii_rx_clk, //GMII接收时钟 output rec_pkt_done, //UDP单包数据接收完成信号 output rec_en, //UDP接收的数据使能信号 output [31:0] rec_data, //UDP接收的数据output [15:0] rec_byte_num //UDP接收到的字节数
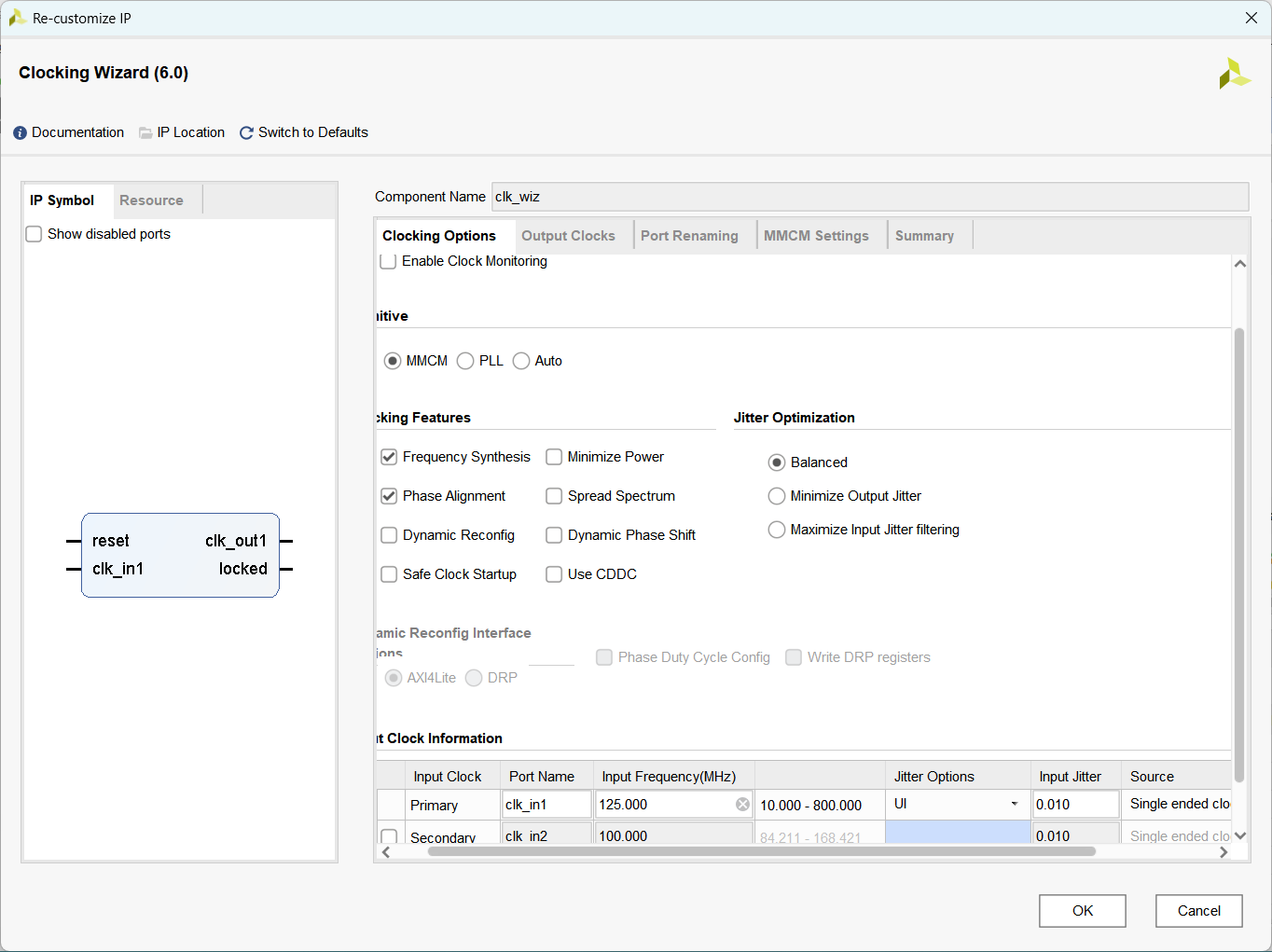
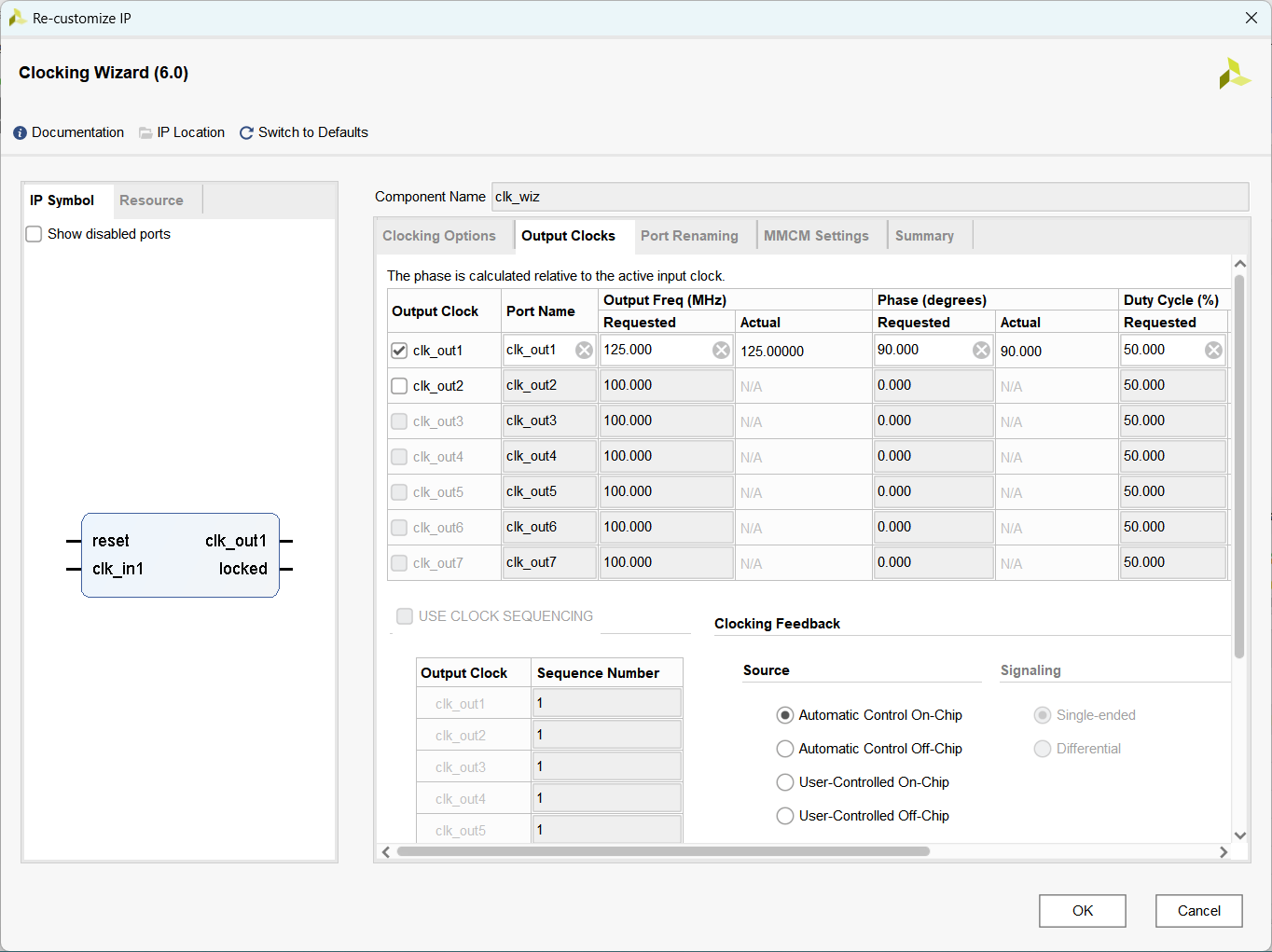
);//parameter define//开发板MAC地址 00-11-22-33-44-55parameter BOARD_MAC = 48'h00_11_22_33_44_55;//开发板IP地址 192.168.1.10parameter BOARD_IP = {8'd192, 8'd168, 8'd1, 8'd10};//目的MAC地址 ff_ff_ff_ff_ff_ffparameter DES_MAC = 48'hff_ff_ff_ff_ff_ff;//目的IP地址 192.168.1.102 parameter DES_IP = {8'd192, 8'd168, 8'd1, 8'd102};//wire define wire gmii_rx_dv; //GMII接收数据有效信号wire [ 7:0] gmii_rxd; //GMII接收数据wire gmii_tx_en; //GMII发送数据使能信号wire [ 7:0] gmii_txd; //GMII发送数据 wire arp_gmii_tx_en; //ARP GMII输出数据有效信号 wire [ 7:0] arp_gmii_txd; //ARP GMII输出数据wire arp_rx_done; //ARP接收完成信号wire arp_rx_type; //ARP接收类型 0:请求 1:应答wire [47:0] src_mac; //接收到目的MAC地址wire [31:0] src_ip; //接收到目的IP地址 wire arp_tx_en; //ARP发送使能信号wire arp_tx_type; //ARP发送类型 0:请求 1:应答wire [47:0] des_mac; //发送的目标MAC地址wire [31:0] des_ip; //发送的目标IP地址 wire arp_tx_done; //ARP发送完成信号wire udp_gmii_tx_en; //UDP GMII输出数据有效信号 wire [ 7:0] udp_gmii_txd; //UDP GMII输出数据//*****************************************************//** main code//*****************************************************assign des_mac = src_mac;assign des_ip = src_ip;assign eth_txc = clk_125m_deg;clk_wiz u_clk_wiz (// Clock out ports.clk_out1(clk_125m_deg), // output clk_out1// Status and control signals.reset (~sys_rst_n), // input reset.locked (locked), // output locked// Clock in ports.clk_in1 (rgmii_txc) // input clk_in1);//GMII接口转RGMII接口gmii_to_rgmii u_gmii_to_rgmii (.gmii_rx_clk(gmii_rx_clk),.gmii_rx_dv (gmii_rx_dv),.gmii_rxd (gmii_rxd),.gmii_tx_clk(gmii_tx_clk),.gmii_tx_en (gmii_tx_en),.gmii_txd (gmii_txd),.rgmii_rxc (eth_rxc),.rgmii_rx_ctl(eth_rx_ctl),.rgmii_rxd (eth_rxd),.rgmii_txc (rgmii_txc),.rgmii_tx_ctl(eth_tx_ctl),.rgmii_txd (eth_txd));//ARP通信arp_top #(.BOARD_MAC(BOARD_MAC), //参数例化.BOARD_IP (BOARD_IP),.DES_MAC (DES_MAC),.DES_IP (DES_IP)) u_arp_top (.rst_n(sys_rst_n),.gmii_rx_clk(gmii_rx_clk),.gmii_rx_dv (gmii_rx_dv),.gmii_rxd (gmii_rxd),.gmii_tx_clk(gmii_tx_clk),.gmii_tx_en (arp_gmii_tx_en),.gmii_txd (arp_gmii_txd),.arp_rx_done(arp_rx_done),.arp_rx_type(arp_rx_type),.src_mac (src_mac),.src_ip (src_ip),.arp_tx_en (arp_tx_en),.arp_tx_type(arp_tx_type),.des_mac (des_mac),.des_ip (des_ip),.tx_done (arp_tx_done));//UDP通信udp_top #(.BOARD_MAC(BOARD_MAC), //参数例化.BOARD_IP (BOARD_IP),.DES_MAC (DES_MAC),.DES_IP (DES_IP)) u_udp_top (.rst_n(sys_rst_n),.gmii_rx_clk(gmii_rx_clk),.gmii_rx_dv (gmii_rx_dv),.gmii_rxd (gmii_rxd),.gmii_tx_clk(gmii_tx_clk),.gmii_tx_en (udp_gmii_tx_en),.gmii_txd (udp_gmii_txd),.rec_pkt_done(rec_pkt_done),.rec_en (rec_en),.rec_data (rec_data),.rec_byte_num(rec_byte_num),.tx_start_en (udp_tx_start_en),.tx_data (tx_data),.tx_byte_num (tx_byte_num),.des_mac (des_mac),.des_ip (des_ip),.tx_done (udp_tx_done),.tx_req (tx_req));//以太网控制模块eth_ctrl u_eth_ctrl (.clk (gmii_rx_clk),.rst_n(sys_rst_n),.arp_rx_done (arp_rx_done),.arp_rx_type (arp_rx_type),.arp_tx_en (arp_tx_en),.arp_tx_type (arp_tx_type),.arp_tx_done (arp_tx_done),.arp_gmii_tx_en(arp_gmii_tx_en),.arp_gmii_txd (arp_gmii_txd),.udp_gmii_tx_en(udp_gmii_tx_en),.udp_gmii_txd (udp_gmii_txd),.gmii_tx_en(gmii_tx_en),.gmii_txd (gmii_txd));endmodule
2.9 GMII接口转RGMII接口模块
`timescale 1ns / 1ps
//GMII接口转RGMII接口模块module gmii_to_rgmii (//以太网GMII接口output gmii_rx_clk, //GMII接收时钟output gmii_rx_dv, //GMII接收数据有效信号output [7:0] gmii_rxd, //GMII接收数据input gmii_tx_clk, //GMII发送时钟input gmii_tx_en, //GMII发送数据使能信号input [7:0] gmii_txd, //GMII发送数据//以太网RGMII接口 input rgmii_rxc, //RGMII接收时钟input rgmii_rx_ctl, //RGMII接收数据控制信号input [3:0] rgmii_rxd, //RGMII接收数据output rgmii_txc, //RGMII发送时钟 output rgmii_tx_ctl, //RGMII发送数据控制信号output [3:0] rgmii_txd //RGMII发送数据
);//*****************************************************//** main code//*****************************************************assign gmii_tx_clk = gmii_rx_clk;//RGMII接收rgmii_rx u_rgmii_rx (.gmii_rx_clk (gmii_rx_clk),.rgmii_rxc (rgmii_rxc),.rgmii_rx_ctl(rgmii_rx_ctl),.rgmii_rxd (rgmii_rxd),.gmii_rx_dv(gmii_rx_dv),.gmii_rxd (gmii_rxd));//RGMII发送rgmii_tx u_rgmii_tx (.gmii_tx_clk(gmii_tx_clk),.gmii_tx_en (gmii_tx_en),.gmii_txd (gmii_txd),.rgmii_txc (rgmii_txc),.rgmii_tx_ctl(rgmii_tx_ctl),.rgmii_txd (rgmii_txd));endmodule
2.10 RGMII接收模块
`timescale 1ns / 1ps
//RGMII接收模块module rgmii_rx (//以太网RGMII接口input rgmii_rxc, //RGMII接收时钟input rgmii_rx_ctl, //RGMII接收数据控制信号input [3:0] rgmii_rxd, //RGMII接收数据 //以太网GMII接口output gmii_rx_clk, //GMII接收时钟output gmii_rx_dv, //GMII接收数据有效信号output [7:0] gmii_rxd //GMII接收数据
);//wire definewire rgmii_rxc_bufg; //全局时钟缓存wire rgmii_rxc_bufio; //全局时钟IO缓存wire [1:0] gmii_rxdv_t; //两位GMII接收有效信号 //*****************************************************//** main code//*****************************************************assign gmii_rx_clk = rgmii_rxc_bufg;assign gmii_rx_dv = gmii_rxdv_t[0] & gmii_rxdv_t[1];//全局时钟缓存BUFG BUFG_inst (.I(rgmii_rxc), // 1-bit input: Clock input.O(rgmii_rxc_bufg) // 1-bit output: Clock output);//全局时钟IO缓存BUFIO BUFIO_inst (.I(rgmii_rxc), // 1-bit input: Clock input.O(rgmii_rxc_bufio) // 1-bit output: Clock output);//将输入的上下边沿DDR信号,转换成两位单边沿SDR信号IDDRE1 #(.DDR_CLK_EDGE ("SAME_EDGE_PIPELINED"),// IDDRE1 mode (OPPOSITE_EDGE, SAME_EDGE, SAME_EDGE_PIPELINED).IS_CB_INVERTED(1'b0), // Optional inversion for CB.IS_C_INVERTED(1'b0) // Optional inversion for C) IDDRE1_inst (.Q1(gmii_rxdv_t[0]), // 1-bit output: Registered parallel output 1.Q2(gmii_rxdv_t[1]), // 1-bit output: Registered parallel output 2.C (rgmii_rxc_bufio), // 1-bit input: High-speed clock.CB(~rgmii_rxc_bufio), // 1-bit input: Inversion of High-speed clock C.D (rgmii_rx_ctl), // 1-bit input: Serial Data Input.R (1'b0) // 1-bit input: Active High Async Reset);genvar i;generatefor (i = 0; i < 4; i = i + 1) begin : rxdata_busIDDRE1 #(.DDR_CLK_EDGE ("SAME_EDGE_PIPELINED"), // IDDRE1 mode (OPPOSITE_EDGE, SAME_EDGE, SAME_EDGE_PIPELINED).IS_CB_INVERTED(1'b0), // Optional inversion for CB.IS_C_INVERTED(1'b0) // Optional inversion for C) IDDRE1_inst (.Q1(gmii_rxd[i]), // 1-bit output: Registered parallel output 1.Q2(gmii_rxd[4+i]), // 1-bit output: Registered parallel output 2.C (rgmii_rxc_bufio), // 1-bit input: High-speed clock.CB(~rgmii_rxc_bufio), // 1-bit input: Inversion of High-speed clock C.D (rgmii_rxd[i]), // 1-bit input: Serial Data Input.R (1'b0) // 1-bit input: Active High Async Reset);endendgenerateendmodule
2.11 RGMII发送模块
`timescale 1ns / 1ps
//RGMII发送模块module rgmii_tx (//GMII发送端口input gmii_tx_clk, //GMII发送时钟 input gmii_tx_en, //GMII输出数据有效信号input [7:0] gmii_txd, //GMII输出数据 //RGMII发送端口output rgmii_txc, //RGMII发送数据时钟 output rgmii_tx_ctl, //RGMII输出数据有效信号output [3:0] rgmii_txd //RGMII输出数据
);//*****************************************************//** main code//*****************************************************assign rgmii_txc = gmii_tx_clk;//输出双沿采样寄存器 (rgmii_tx_ctl)ODDRE1 #(.IS_C_INVERTED(1'b0), // Optional inversion for C.IS_D1_INVERTED(1'b0), // Unsupported, do not use.IS_D2_INVERTED(1'b0), // Unsupported, do not use.SIM_DEVICE ("ULTRASCALE"), // Set the device version (ULTRASCALE, ULTRASCALE_PLUS, ULTRASCALE_PLUS_ES1,ULTRASCALE_PLUS_ES2).SRVAL(1'b0) // Initializes the ODDRE1 Flip-Flops to the specified value (1'b0, 1'b1)) ODDRE1_tx_ctl (.Q (rgmii_tx_ctl), // 1-bit output: Data output to IOB.C (gmii_tx_clk), // 1-bit input: High-speed clock input.D1(gmii_tx_en), // 1-bit input: Parallel data input 1.D2(gmii_tx_en), // 1-bit input: Parallel data input 2.SR(1'b0) // 1-bit input: Active High Async Reset);genvar i;generatefor (i = 0; i < 4; i = i + 1) begin : txdata_busODDRE1 #(.IS_C_INVERTED(1'b0), // Optional inversion for C.IS_D1_INVERTED(1'b0), // Unsupported, do not use.IS_D2_INVERTED(1'b0), // Unsupported, do not use.SIM_DEVICE("ULTRASCALE"), // Set the device version (ULTRASCALE, ULTRASCALE_PLUS, ULTRASCALE_PLUS_ES1,ULTRASCALE_PLUS_ES2).SRVAL(1'b0) // Initializes the ODDRE1 Flip-Flops to the specified value (1'b0, 1'b1)) ODDRE1_inst (.Q (rgmii_txd[i]), // 1-bit output: Data output to IOB.C (gmii_tx_clk), // 1-bit input: High-speed clock input.D1(gmii_txd[i]), // 1-bit input: Parallel data input 1.D2(gmii_txd[4+i]), // 1-bit input: Parallel data input 2.SR(1'b0) // 1-bit input: Active High Async Reset);endendgenerateendmodule
2.12 arp顶层模块
`timescale 1ns / 1ps
//arp顶层模块module arp_top (input rst_n, //复位信号,低电平有效//GMII接口input gmii_rx_clk, //GMII接收数据时钟input gmii_rx_dv, //GMII输入数据有效信号input [7:0] gmii_rxd, //GMII输入数据input gmii_tx_clk, //GMII发送数据时钟output gmii_tx_en, //GMII输出数据有效信号output [7:0] gmii_txd, //GMII输出数据 //用户接口output arp_rx_done, //ARP接收完成信号output arp_rx_type, //ARP接收类型 0:请求 1:应答output [47:0] src_mac, //接收到目的MAC地址output [31:0] src_ip, //接收到目的IP地址 input arp_tx_en, //ARP发送使能信号input arp_tx_type, //ARP发送类型 0:请求 1:应答input [47:0] des_mac, //发送的目标MAC地址input [31:0] des_ip, //发送的目标IP地址output tx_done //以太网发送完成信号
);//parameter define//开发板MAC地址 00-11-22-33-44-55parameter BOARD_MAC = 48'h00_11_22_33_44_55;//开发板IP地址 192.168.1.10 parameter BOARD_IP = {8'd192, 8'd168, 8'd1, 8'd10};//目的MAC地址 ff_ff_ff_ff_ff_ffparameter DES_MAC = 48'hff_ff_ff_ff_ff_ff;//目的IP地址 192.168.1.102 parameter DES_IP = {8'd192, 8'd168, 8'd1, 8'd102};//wire definewire crc_en; //CRC开始校验使能wire crc_clr; //CRC数据复位信号 wire [ 7:0] crc_d8; //输入待校验8位数据wire [31:0] crc_data; //CRC校验数据wire [31:0] crc_next; //CRC下次校验完成数据//*****************************************************//** main code//*****************************************************assign crc_d8 = gmii_txd;//ARP接收模块 arp_rx #(.BOARD_MAC(BOARD_MAC), //参数例化.BOARD_IP (BOARD_IP)) u_arp_rx (.clk (gmii_rx_clk),.rst_n(rst_n),.gmii_rx_dv (gmii_rx_dv),.gmii_rxd (gmii_rxd),.arp_rx_done(arp_rx_done),.arp_rx_type(arp_rx_type),.src_mac (src_mac),.src_ip (src_ip));//ARP发送模块arp_tx #(.BOARD_MAC(BOARD_MAC), //参数例化.BOARD_IP (BOARD_IP),.DES_MAC (DES_MAC),.DES_IP (DES_IP)) u_arp_tx (.clk (gmii_tx_clk),.rst_n(rst_n),.arp_tx_en (arp_tx_en),.arp_tx_type(arp_tx_type),.des_mac (des_mac),.des_ip (des_ip),.crc_data (crc_data),.crc_next (crc_next[31:24]),.tx_done (tx_done),.gmii_tx_en (gmii_tx_en),.gmii_txd (gmii_txd),.crc_en (crc_en),.crc_clr (crc_clr));//以太网发送CRC校验模块crc32_d8 u_crc32_d8 (.clk (gmii_tx_clk),.rst_n (rst_n),.data (crc_d8),.crc_en (crc_en),.crc_clr (crc_clr),.crc_data(crc_data),.crc_next(crc_next));endmodule
2.13 arp接收模块
`timescale 1ns / 1ps
//arp接收模块module arp_rx (input clk, //时钟信号input rst_n, //复位信号,低电平有效input gmii_rx_dv, //GMII输入数据有效信号input [ 7:0] gmii_rxd, //GMII输入数据output reg arp_rx_done, //ARP接收完成信号output reg arp_rx_type, //ARP接收类型 0:请求 1:应答output reg [47:0] src_mac, //接收到的源MAC地址output reg [31:0] src_ip //接收到的源IP地址
);//parameter define//开发板MAC地址 00-11-22-33-44-55parameter BOARD_MAC = 48'h00_11_22_33_44_55;//开发板IP地址 192.168.1.10 parameter BOARD_IP = {8'd192, 8'd168, 8'd1, 8'd10};localparam st_idle = 5'b0_0001; //初始状态,等待接收前导码localparam st_preamble = 5'b0_0010; //接收前导码状态 localparam st_eth_head = 5'b0_0100; //接收以太网帧头localparam st_arp_data = 5'b0_1000; //接收ARP数据localparam st_rx_end = 5'b1_0000; //接收结束localparam ETH_TPYE = 16'h0806; //以太网帧类型 ARP//reg definereg [ 4:0] cur_state;reg [ 4:0] next_state;reg skip_en; //控制状态跳转使能信号reg error_en; //解析错误使能信号reg [ 4:0] cnt; //解析数据计数器reg [47:0] des_mac_t; //接收到的目的MAC地址reg [31:0] des_ip_t; //接收到的目的IP地址reg [47:0] src_mac_t; //接收到的源MAC地址reg [31:0] src_ip_t; //接收到的源IP地址reg [15:0] eth_type; //以太网类型reg [15:0] op_data; //操作码//*****************************************************//** main code//*****************************************************//(三段式状态机)同步时序描述状态转移always @(posedge clk or negedge rst_n) beginif (!rst_n) cur_state <= st_idle;else cur_state <= next_state;end//组合逻辑判断状态转移条件always @(*) beginnext_state = st_idle;case (cur_state)st_idle: begin //等待接收前导码if (skip_en) next_state = st_preamble;else next_state = st_idle;endst_preamble: begin //接收前导码if (skip_en) next_state = st_eth_head;else if (error_en) next_state = st_rx_end;else next_state = st_preamble;endst_eth_head: begin //接收以太网帧头if (skip_en) next_state = st_arp_data;else if (error_en) next_state = st_rx_end;else next_state = st_eth_head;endst_arp_data: begin //接收ARP数据if (skip_en) next_state = st_rx_end;else if (error_en) next_state = st_rx_end;else next_state = st_arp_data;endst_rx_end: begin //接收结束if (skip_en) next_state = st_idle;else next_state = st_rx_end;enddefault: next_state = st_idle;endcaseend//时序电路描述状态输出,解析以太网数据always @(posedge clk or negedge rst_n) beginif (!rst_n) beginskip_en <= 1'b0;error_en <= 1'b0;cnt <= 5'd0;des_mac_t <= 48'd0;des_ip_t <= 32'd0;src_mac_t <= 48'd0;src_ip_t <= 32'd0;eth_type <= 16'd0;op_data <= 16'd0;arp_rx_done <= 1'b0;arp_rx_type <= 1'b0;src_mac <= 48'd0;src_ip <= 32'd0;end else beginskip_en <= 1'b0;error_en <= 1'b0;arp_rx_done <= 1'b0;case (next_state)st_idle: begin //检测到第一个8'h55if ((gmii_rx_dv == 1'b1) && (gmii_rxd == 8'h55)) skip_en <= 1'b1;endst_preamble: beginif (gmii_rx_dv) begin //解析前导码cnt <= cnt + 5'd1;if ((cnt < 5'd6) && (gmii_rxd != 8'h55)) //7个8'h55 error_en <= 1'b1;else if (cnt == 5'd6) begincnt <= 5'd0;if (gmii_rxd == 8'hd5) //1个8'hd5skip_en <= 1'b1;else error_en <= 1'b1;endendendst_eth_head: beginif (gmii_rx_dv) begincnt <= cnt + 5'b1;if (cnt < 5'd6) des_mac_t <= {des_mac_t[39:0], gmii_rxd};else if (cnt == 5'd6) begin//判断MAC地址是否为开发板MAC地址或者公共地址if ((des_mac_t != BOARD_MAC) && (des_mac_t != 48'hff_ff_ff_ff_ff_ff))error_en <= 1'b1;end else if (cnt == 5'd12) eth_type[15:8] <= gmii_rxd; //以太网协议类型else if (cnt == 5'd13) begineth_type[7:0] <= gmii_rxd;cnt <= 5'd0;if (eth_type[15:8] == ETH_TPYE[15:8] //判断是否为ARP协议&& gmii_rxd == ETH_TPYE[7:0])skip_en <= 1'b1;else error_en <= 1'b1;endendendst_arp_data: beginif (gmii_rx_dv) begincnt <= cnt + 5'd1;if (cnt == 5'd6) op_data[15:8] <= gmii_rxd; //操作码 else if (cnt == 5'd7) op_data[7:0] <= gmii_rxd;else if (cnt >= 5'd8 && cnt < 5'd14) //源MAC地址src_mac_t <= {src_mac_t[39:0], gmii_rxd};else if (cnt >= 5'd14 && cnt < 5'd18) //源IP地址src_ip_t <= {src_ip_t[23:0], gmii_rxd};else if (cnt >= 5'd24 && cnt < 5'd28) //目标IP地址des_ip_t <= {des_ip_t[23:0], gmii_rxd};else if (cnt == 5'd28) begincnt <= 5'd0;if (des_ip_t == BOARD_IP) begin //判断目的IP地址和操作码if ((op_data == 16'd1) || (op_data == 16'd2)) beginskip_en <= 1'b1;arp_rx_done <= 1'b1;src_mac <= src_mac_t;src_ip <= src_ip_t;src_mac_t <= 48'd0;src_ip_t <= 32'd0;des_mac_t <= 48'd0;des_ip_t <= 32'd0;if (op_data == 16'd1) arp_rx_type <= 1'b0; //ARP请求else arp_rx_type <= 1'b1; //ARP应答end else error_en <= 1'b1;end else error_en <= 1'b1;endendendst_rx_end: begincnt <= 5'd0;//单包数据接收完成 if (gmii_rx_dv == 1'b0 && skip_en == 1'b0) skip_en <= 1'b1;enddefault: ;endcaseendendendmodule
2.14 arp发送模块
`timescale 1ns / 1ps
//arp发送模块module arp_tx (input clk, //时钟信号input rst_n, //复位信号,低电平有效input arp_tx_en, //ARP发送使能信号input arp_tx_type, //ARP发送类型 0:请求 1:应答input [47:0] des_mac, //发送的目标MAC地址input [31:0] des_ip, //发送的目标IP地址input [31:0] crc_data, //CRC校验数据input [ 7:0] crc_next, //CRC下次校验完成数据output reg tx_done, //以太网发送完成信号output reg gmii_tx_en, //GMII输出数据有效信号output reg [ 7:0] gmii_txd, //GMII输出数据output reg crc_en, //CRC开始校验使能output reg crc_clr //CRC数据复位信号
);//parameter define//开发板MAC地址 00-11-22-33-44-55parameter BOARD_MAC = 48'h00_11_22_33_44_55;//开发板IP地址 192.168.1.10parameter BOARD_IP = {8'd192, 8'd168, 8'd1, 8'd10};//目的MAC地址 ff_ff_ff_ff_ff_ffparameter DES_MAC = 48'hff_ff_ff_ff_ff_ff;//目的IP地址 192.168.1.102 parameter DES_IP = {8'd192, 8'd168, 8'd1, 8'd102};localparam st_idle = 5'b0_0001; //初始状态,等待开始发送信号localparam st_preamble = 5'b0_0010; //发送前导码+帧起始界定符localparam st_eth_head = 5'b0_0100; //发送以太网帧头localparam st_arp_data = 5'b0_1000; //localparam st_crc = 5'b1_0000; //发送CRC校验值localparam ETH_TYPE = 16'h0806; //以太网帧类型 ARP协议localparam HD_TYPE = 16'h0001; //硬件类型 以太网localparam PROTOCOL_TYPE = 16'h0800; //上层协议为IP协议//以太网数据最小为46个字节,不足部分填充数据localparam MIN_DATA_NUM = 16'd46;//reg definereg [4:0] cur_state;reg [4:0] next_state;reg [7:0] preamble [ 7:0]; //前导码+SFDreg [7:0] eth_head [13:0]; //以太网首部reg [7:0] arp_data [27:0]; //ARP数据reg tx_en_d0; //arp_tx_en信号延时reg tx_en_d1;reg skip_en; //控制状态跳转使能信号reg [5:0] cnt;reg [4:0] data_cnt; //发送数据个数计数器reg tx_done_t;//wire define wire pos_tx_en; //arp_tx_en信号上升沿//*****************************************************//** main code//*****************************************************assign pos_tx_en = (~tx_en_d1) & tx_en_d0;//对arp_tx_en信号延时打拍两次,用于采arp_tx_en的上升沿always @(posedge clk or negedge rst_n) beginif (!rst_n) begintx_en_d0 <= 1'b0;tx_en_d1 <= 1'b0;end else begintx_en_d0 <= arp_tx_en;tx_en_d1 <= tx_en_d0;endend//(三段式状态机)同步时序描述状态转移always @(posedge clk or negedge rst_n) beginif (!rst_n) cur_state <= st_idle;else cur_state <= next_state;end//组合逻辑判断状态转移条件always @(*) beginnext_state = st_idle;case (cur_state)st_idle: begin //空闲状态if (skip_en) next_state = st_preamble;else next_state = st_idle;endst_preamble: begin //发送前导码+帧起始界定符if (skip_en) next_state = st_eth_head;else next_state = st_preamble;endst_eth_head: begin //发送以太网首部if (skip_en) next_state = st_arp_data;else next_state = st_eth_head;endst_arp_data: begin //发送ARP数据 if (skip_en) next_state = st_crc;else next_state = st_arp_data;endst_crc: begin //发送CRC校验值if (skip_en) next_state = st_idle;else next_state = st_crc;enddefault: next_state = st_idle;endcaseend//时序电路描述状态输出,发送以太网数据always @(posedge clk or negedge rst_n) beginif (!rst_n) beginskip_en <= 1'b0;cnt <= 6'd0;data_cnt <= 5'd0;crc_en <= 1'b0;gmii_tx_en <= 1'b0;gmii_txd <= 8'd0;tx_done_t <= 1'b0;//初始化数组 //前导码 7个8'h55 + 1个8'hd5 preamble[0] <= 8'h55;preamble[1] <= 8'h55;preamble[2] <= 8'h55;preamble[3] <= 8'h55;preamble[4] <= 8'h55;preamble[5] <= 8'h55;preamble[6] <= 8'h55;preamble[7] <= 8'hd5;//以太网帧头 eth_head[0] <= DES_MAC[47:40]; //目的MAC地址eth_head[1] <= DES_MAC[39:32];eth_head[2] <= DES_MAC[31:24];eth_head[3] <= DES_MAC[23:16];eth_head[4] <= DES_MAC[15:8];eth_head[5] <= DES_MAC[7:0];eth_head[6] <= BOARD_MAC[47:40]; //源MAC地址eth_head[7] <= BOARD_MAC[39:32];eth_head[8] <= BOARD_MAC[31:24];eth_head[9] <= BOARD_MAC[23:16];eth_head[10] <= BOARD_MAC[15:8];eth_head[11] <= BOARD_MAC[7:0];eth_head[12] <= ETH_TYPE[15:8]; //以太网帧类型eth_head[13] <= ETH_TYPE[7:0];//ARP数据 arp_data[0] <= HD_TYPE[15:8]; //硬件类型arp_data[1] <= HD_TYPE[7:0];arp_data[2] <= PROTOCOL_TYPE[15:8]; //上层协议类型arp_data[3] <= PROTOCOL_TYPE[7:0];arp_data[4] <= 8'h06; //硬件地址长度,6arp_data[5] <= 8'h04; //协议地址长度,4arp_data[6] <= 8'h00; //OP,操作码 8'h01:ARP请求 8'h02:ARP应答arp_data[7] <= 8'h01;arp_data[8] <= BOARD_MAC[47:40]; //发送端(源)MAC地址arp_data[9] <= BOARD_MAC[39:32];arp_data[10] <= BOARD_MAC[31:24];arp_data[11] <= BOARD_MAC[23:16];arp_data[12] <= BOARD_MAC[15:8];arp_data[13] <= BOARD_MAC[7:0];arp_data[14] <= BOARD_IP[31:24]; //发送端(源)IP地址arp_data[15] <= BOARD_IP[23:16];arp_data[16] <= BOARD_IP[15:8];arp_data[17] <= BOARD_IP[7:0];arp_data[18] <= DES_MAC[47:40]; //接收端(目的)MAC地址arp_data[19] <= DES_MAC[39:32];arp_data[20] <= DES_MAC[31:24];arp_data[21] <= DES_MAC[23:16];arp_data[22] <= DES_MAC[15:8];arp_data[23] <= DES_MAC[7:0];arp_data[24] <= DES_IP[31:24]; //接收端(目的)IP地址arp_data[25] <= DES_IP[23:16];arp_data[26] <= DES_IP[15:8];arp_data[27] <= DES_IP[7:0];end else beginskip_en <= 1'b0;crc_en <= 1'b0;gmii_tx_en <= 1'b0;tx_done_t <= 1'b0;case (next_state)st_idle: beginif (pos_tx_en) beginskip_en <= 1'b1;//如果目标MAC地址和IP地址已经更新,则发送正确的地址if ((des_mac != 48'b0) || (des_ip != 32'd0)) begineth_head[0] <= des_mac[47:40];eth_head[1] <= des_mac[39:32];eth_head[2] <= des_mac[31:24];eth_head[3] <= des_mac[23:16];eth_head[4] <= des_mac[15:8];eth_head[5] <= des_mac[7:0];arp_data[18] <= des_mac[47:40];arp_data[19] <= des_mac[39:32];arp_data[20] <= des_mac[31:24];arp_data[21] <= des_mac[23:16];arp_data[22] <= des_mac[15:8];arp_data[23] <= des_mac[7:0];arp_data[24] <= des_ip[31:24];arp_data[25] <= des_ip[23:16];arp_data[26] <= des_ip[15:8];arp_data[27] <= des_ip[7:0];endif (arp_tx_type == 1'b0) arp_data[7] <= 8'h01; //ARP请求 else arp_data[7] <= 8'h02; //ARP应答endendst_preamble: begin //发送前导码+帧起始界定符gmii_tx_en <= 1'b1;gmii_txd <= preamble[cnt];if (cnt == 6'd7) beginskip_en <= 1'b1;cnt <= 1'b0;end else cnt <= cnt + 1'b1;endst_eth_head: begin //发送以太网首部gmii_tx_en <= 1'b1;crc_en <= 1'b1;gmii_txd <= eth_head[cnt];if (cnt == 6'd13) beginskip_en <= 1'b1;cnt <= 1'b0;end else cnt <= cnt + 1'b1;endst_arp_data: begin //发送ARP数据 crc_en <= 1'b1;gmii_tx_en <= 1'b1;//至少发送46个字节if (cnt == MIN_DATA_NUM - 1'b1) beginskip_en <= 1'b1;cnt <= 1'b0;data_cnt <= 1'b0;end else cnt <= cnt + 1'b1;if (data_cnt <= 6'd27) begindata_cnt <= data_cnt + 1'b1;gmii_txd <= arp_data[data_cnt];end else gmii_txd <= 8'd0; //Padding,填充0endst_crc: begin //发送CRC校验值gmii_tx_en <= 1'b1;cnt <= cnt + 1'b1;if (cnt == 6'd0)gmii_txd <= {~crc_next[0],~crc_next[1],~crc_next[2],~crc_next[3],~crc_next[4],~crc_next[5],~crc_next[6],~crc_next[7]};else if (cnt == 6'd1)gmii_txd <= {~crc_data[16],~crc_data[17],~crc_data[18],~crc_data[19],~crc_data[20],~crc_data[21],~crc_data[22],~crc_data[23]};else if (cnt == 6'd2) begingmii_txd <= {~crc_data[8],~crc_data[9],~crc_data[10],~crc_data[11],~crc_data[12],~crc_data[13],~crc_data[14],~crc_data[15]};end else if (cnt == 6'd3) begingmii_txd <= {~crc_data[0],~crc_data[1],~crc_data[2],~crc_data[3],~crc_data[4],~crc_data[5],~crc_data[6],~crc_data[7]};tx_done_t <= 1'b1;skip_en <= 1'b1;cnt <= 1'b0;endenddefault: ;endcaseendend//发送完成信号及crc值复位信号always @(posedge clk or negedge rst_n) beginif (!rst_n) begintx_done <= 1'b0;crc_clr <= 1'b0;end else begintx_done <= tx_done_t;crc_clr <= tx_done_t;endendendmodule
2.15 CRC32校验模块
`timescale 1ns / 1ps
//CRC32校验模块module crc32_d8 (input clk, //时钟信号input rst_n, //复位信号,低电平有效input [ 7:0] data, //输入待校验8位数据input crc_en, //crc使能,开始校验标志input crc_clr, //crc数据复位信号 output reg [31:0] crc_data, //CRC校验数据output [31:0] crc_next //CRC下次校验完成数据
);//*****************************************************//** main code//*****************************************************//输入待校验8位数据,需要先将高低位互换wire [7:0] data_t;assign data_t = {data[0], data[1], data[2], data[3], data[4], data[5], data[6], data[7]};//CRC32的生成多项式为:G(x)= x^32 + x^26 + x^23 + x^22 + x^16 + x^12 + x^11 //+ x^10 + x^8 + x^7 + x^5 + x^4 + x^2 + x^1 + 1assign crc_next[0] = crc_data[24] ^ crc_data[30] ^ data_t[0] ^ data_t[6];assign crc_next[1] = crc_data[24] ^ crc_data[25] ^ crc_data[30] ^ crc_data[31] ^ data_t[0] ^ data_t[1] ^ data_t[6] ^ data_t[7];assign crc_next[2] = crc_data[24] ^ crc_data[25] ^ crc_data[26] ^ crc_data[30] ^ crc_data[31] ^ data_t[0] ^ data_t[1] ^ data_t[2] ^ data_t[6] ^ data_t[7];assign crc_next[3] = crc_data[25] ^ crc_data[26] ^ crc_data[27] ^ crc_data[31] ^ data_t[1] ^ data_t[2] ^ data_t[3] ^ data_t[7];assign crc_next[4] = crc_data[24] ^ crc_data[26] ^ crc_data[27] ^ crc_data[28] ^ crc_data[30] ^ data_t[0] ^ data_t[2] ^ data_t[3] ^ data_t[4] ^ data_t[6];assign crc_next[5] = crc_data[24] ^ crc_data[25] ^ crc_data[27] ^ crc_data[28] ^ crc_data[29] ^ crc_data[30] ^ crc_data[31] ^ data_t[0] ^ data_t[1] ^ data_t[3] ^ data_t[4] ^ data_t[5] ^ data_t[6] ^ data_t[7];assign crc_next[6] = crc_data[25] ^ crc_data[26] ^ crc_data[28] ^ crc_data[29] ^ crc_data[30] ^ crc_data[31] ^ data_t[1] ^ data_t[2] ^ data_t[4] ^ data_t[5] ^ data_t[6] ^ data_t[7];assign crc_next[7] = crc_data[24] ^ crc_data[26] ^ crc_data[27] ^ crc_data[29] ^ crc_data[31] ^ data_t[0] ^ data_t[2] ^ data_t[3] ^ data_t[5] ^ data_t[7];assign crc_next[8] = crc_data[0] ^ crc_data[24] ^ crc_data[25] ^ crc_data[27] ^ crc_data[28] ^ data_t[0] ^ data_t[1] ^ data_t[3] ^ data_t[4];assign crc_next[9] = crc_data[1] ^ crc_data[25] ^ crc_data[26] ^ crc_data[28] ^ crc_data[29] ^ data_t[1] ^ data_t[2] ^ data_t[4] ^ data_t[5];assign crc_next[10] = crc_data[2] ^ crc_data[24] ^ crc_data[26] ^ crc_data[27] ^ crc_data[29] ^ data_t[0] ^ data_t[2] ^ data_t[3] ^ data_t[5];assign crc_next[11] = crc_data[3] ^ crc_data[24] ^ crc_data[25] ^ crc_data[27] ^ crc_data[28] ^ data_t[0] ^ data_t[1] ^ data_t[3] ^ data_t[4];assign crc_next[12] = crc_data[4] ^ crc_data[24] ^ crc_data[25] ^ crc_data[26] ^ crc_data[28] ^ crc_data[29] ^ crc_data[30] ^ data_t[0] ^ data_t[1] ^ data_t[2] ^ data_t[4] ^ data_t[5] ^ data_t[6];assign crc_next[13] = crc_data[5] ^ crc_data[25] ^ crc_data[26] ^ crc_data[27] ^ crc_data[29] ^ crc_data[30] ^ crc_data[31] ^ data_t[1] ^ data_t[2] ^ data_t[3] ^ data_t[5] ^ data_t[6] ^ data_t[7];assign crc_next[14] = crc_data[6] ^ crc_data[26] ^ crc_data[27] ^ crc_data[28] ^ crc_data[30] ^ crc_data[31] ^ data_t[2] ^ data_t[3] ^ data_t[4]^ data_t[6] ^ data_t[7];assign crc_next[15] = crc_data[7] ^ crc_data[27] ^ crc_data[28] ^ crc_data[29]^ crc_data[31] ^ data_t[3] ^ data_t[4] ^ data_t[5] ^ data_t[7];assign crc_next[16] = crc_data[8] ^ crc_data[24] ^ crc_data[28] ^ crc_data[29] ^ data_t[0] ^ data_t[4] ^ data_t[5];assign crc_next[17] = crc_data[9] ^ crc_data[25] ^ crc_data[29] ^ crc_data[30] ^ data_t[1] ^ data_t[5] ^ data_t[6];assign crc_next[18] = crc_data[10] ^ crc_data[26] ^ crc_data[30] ^ crc_data[31] ^ data_t[2] ^ data_t[6] ^ data_t[7];assign crc_next[19] = crc_data[11] ^ crc_data[27] ^ crc_data[31] ^ data_t[3] ^ data_t[7];assign crc_next[20] = crc_data[12] ^ crc_data[28] ^ data_t[4];assign crc_next[21] = crc_data[13] ^ crc_data[29] ^ data_t[5];assign crc_next[22] = crc_data[14] ^ crc_data[24] ^ data_t[0];assign crc_next[23] = crc_data[15] ^ crc_data[24] ^ crc_data[25] ^ crc_data[30] ^ data_t[0] ^ data_t[1] ^ data_t[6];assign crc_next[24] = crc_data[16] ^ crc_data[25] ^ crc_data[26] ^ crc_data[31] ^ data_t[1] ^ data_t[2] ^ data_t[7];assign crc_next[25] = crc_data[17] ^ crc_data[26] ^ crc_data[27] ^ data_t[2] ^ data_t[3];assign crc_next[26] = crc_data[18] ^ crc_data[24] ^ crc_data[27] ^ crc_data[28] ^ crc_data[30] ^ data_t[0] ^ data_t[3] ^ data_t[4] ^ data_t[6];assign crc_next[27] = crc_data[19] ^ crc_data[25] ^ crc_data[28] ^ crc_data[29] ^ crc_data[31] ^ data_t[1] ^ data_t[4] ^ data_t[5] ^ data_t[7];assign crc_next[28] = crc_data[20] ^ crc_data[26] ^ crc_data[29] ^ crc_data[30] ^ data_t[2] ^ data_t[5] ^ data_t[6];assign crc_next[29] = crc_data[21] ^ crc_data[27] ^ crc_data[30] ^ crc_data[31] ^ data_t[3] ^ data_t[6] ^ data_t[7];assign crc_next[30] = crc_data[22] ^ crc_data[28] ^ crc_data[31] ^ data_t[4] ^ data_t[7];assign crc_next[31] = crc_data[23] ^ crc_data[29] ^ data_t[5];always @(posedge clk or negedge rst_n) beginif (!rst_n) crc_data <= 32'hff_ff_ff_ff;else if (crc_clr) //CRC校验值复位crc_data <= 32'hff_ff_ff_ff;else if (crc_en) crc_data <= crc_next;endendmodule
2.16 udp顶层模块
`timescale 1ns / 1ps
//udp顶层模块module udp_top (input rst_n, //复位信号,低电平有效//GMII接口input gmii_rx_clk, //GMII接收数据时钟input gmii_rx_dv, //GMII输入数据有效信号input [ 7:0] gmii_rxd, //GMII输入数据input gmii_tx_clk, //GMII发送数据时钟 output gmii_tx_en, //GMII输出数据有效信号output [ 7:0] gmii_txd, //GMII输出数据 //用户接口output rec_pkt_done, //以太网单包数据接收完成信号output rec_en, //以太网接收的数据使能信号output [31:0] rec_data, //以太网接收的数据output [15:0] rec_byte_num, //以太网接收的有效字节数 单位:byte input tx_start_en, //以太网开始发送信号input [31:0] tx_data, //以太网待发送数据 input [15:0] tx_byte_num, //以太网发送的有效字节数 单位:byte input [47:0] des_mac, //发送的目标MAC地址input [31:0] des_ip, //发送的目标IP地址 output tx_done, //以太网发送完成信号output tx_req //读数据请求信号
);//parameter define//开发板MAC地址 00-11-22-33-44-55parameter BOARD_MAC = 48'h00_11_22_33_44_55;//开发板IP地址 192.168.1.10 parameter BOARD_IP = {8'd192, 8'd168, 8'd1, 8'd10};//目的MAC地址 ff_ff_ff_ff_ff_ffparameter DES_MAC = 48'hff_ff_ff_ff_ff_ff;//目的IP地址 192.168.1.102 parameter DES_IP = {8'd192, 8'd168, 8'd1, 8'd102};//wire definewire crc_en; //CRC开始校验使能wire crc_clr; //CRC数据复位信号 wire [ 7:0] crc_d8; //输入待校验8位数据wire [31:0] crc_data; //CRC校验数据wire [31:0] crc_next; //CRC下次校验完成数据//*****************************************************//** main code//*****************************************************assign crc_d8 = gmii_txd;//以太网接收模块 udp_rx #(.BOARD_MAC(BOARD_MAC), //参数例化.BOARD_IP (BOARD_IP)) u_udp_rx (.clk (gmii_rx_clk),.rst_n (rst_n),.gmii_rx_dv (gmii_rx_dv),.gmii_rxd (gmii_rxd),.rec_pkt_done(rec_pkt_done),.rec_en (rec_en),.rec_data (rec_data),.rec_byte_num(rec_byte_num));//以太网发送模块udp_tx #(.BOARD_MAC(BOARD_MAC), //参数例化.BOARD_IP (BOARD_IP),.DES_MAC (DES_MAC),.DES_IP (DES_IP)) u_udp_tx (.clk (gmii_tx_clk),.rst_n (rst_n),.tx_start_en(tx_start_en),.tx_data (tx_data),.tx_byte_num(tx_byte_num),.des_mac (des_mac),.des_ip (des_ip),.crc_data (crc_data),.crc_next (crc_next[31:24]),.tx_done (tx_done),.tx_req (tx_req),.gmii_tx_en (gmii_tx_en),.gmii_txd (gmii_txd),.crc_en (crc_en),.crc_clr (crc_clr));//以太网发送CRC校验模块crc32_d8 u_crc32_d8 (.clk (gmii_tx_clk),.rst_n (rst_n),.data (crc_d8),.crc_en (crc_en),.crc_clr (crc_clr),.crc_data(crc_data),.crc_next(crc_next));endmodule
2.17 udp数据接收模块
`timescale 1ns / 1ps
//udp数据接收模块module udp_rx (input clk, //时钟信号input rst_n, //复位信号,低电平有效input gmii_rx_dv, //GMII输入数据有效信号input [ 7:0] gmii_rxd, //GMII输入数据output reg rec_pkt_done, //以太网单包数据接收完成信号output reg rec_en, //以太网接收的数据使能信号output reg [31:0] rec_data, //以太网接收的数据output reg [15:0] rec_byte_num //以太网接收的有效字数 单位:byte
);//parameter define//开发板MAC地址 00-11-22-33-44-55parameter BOARD_MAC = 48'h00_11_22_33_44_55;//开发板IP地址 192.168.1.10 parameter BOARD_IP = {8'd192, 8'd168, 8'd1, 8'd10};localparam st_idle = 7'b000_0001; //初始状态,等待接收前导码localparam st_preamble = 7'b000_0010; //接收前导码状态 localparam st_eth_head = 7'b000_0100; //接收以太网帧头localparam st_ip_head = 7'b000_1000; //接收IP首部localparam st_udp_head = 7'b001_0000; //接收UDP首部localparam st_rx_data = 7'b010_0000; //接收有效数据localparam st_rx_end = 7'b100_0000; //接收结束localparam ETH_TYPE = 16'h0800; //以太网协议类型 IP协议//reg definereg [ 6:0] cur_state;reg [ 6:0] next_state;reg skip_en; //控制状态跳转使能信号reg error_en; //解析错误使能信号reg [ 4:0] cnt; //解析数据计数器reg [47:0] des_mac; //目的MAC地址reg [15:0] eth_type; //以太网类型reg [31:0] des_ip; //目的IP地址reg [ 5:0] ip_head_byte_num; //IP首部长度reg [15:0] udp_byte_num; //UDP长度reg [15:0] data_byte_num; //数据长度reg [15:0] data_cnt; //有效数据计数 reg [ 1:0] rec_en_cnt; //8bit转32bit计数器//*****************************************************//** main code//*****************************************************//(三段式状态机)同步时序描述状态转移always @(posedge clk or negedge rst_n) beginif (!rst_n) cur_state <= st_idle;else cur_state <= next_state;end//组合逻辑判断状态转移条件always @(*) beginnext_state = st_idle;case (cur_state)st_idle: begin //等待接收前导码if (skip_en) next_state = st_preamble;else next_state = st_idle;endst_preamble: begin //接收前导码if (skip_en) next_state = st_eth_head;else if (error_en) next_state = st_rx_end;else next_state = st_preamble;endst_eth_head: begin //接收以太网帧头if (skip_en) next_state = st_ip_head;else if (error_en) next_state = st_rx_end;else next_state = st_eth_head;endst_ip_head: begin //接收IP首部if (skip_en) next_state = st_udp_head;else if (error_en) next_state = st_rx_end;else next_state = st_ip_head;endst_udp_head: begin //接收UDP首部if (skip_en) next_state = st_rx_data;else next_state = st_udp_head;endst_rx_data: begin //接收有效数据if (skip_en) next_state = st_rx_end;else next_state = st_rx_data;endst_rx_end: begin //接收结束if (skip_en) next_state = st_idle;else next_state = st_rx_end;enddefault: next_state = st_idle;endcaseend//时序电路描述状态输出,解析以太网数据always @(posedge clk or negedge rst_n) beginif (!rst_n) beginskip_en <= 1'b0;error_en <= 1'b0;cnt <= 5'd0;des_mac <= 48'd0;eth_type <= 16'd0;des_ip <= 32'd0;ip_head_byte_num <= 6'd0;udp_byte_num <= 16'd0;data_byte_num <= 16'd0;data_cnt <= 16'd0;rec_en_cnt <= 2'd0;rec_en <= 1'b0;rec_data <= 32'd0;rec_pkt_done <= 1'b0;rec_byte_num <= 16'd0;end else beginskip_en <= 1'b0;error_en <= 1'b0;rec_en <= 1'b0;rec_pkt_done <= 1'b0;case (next_state)st_idle: beginif ((gmii_rx_dv == 1'b1) && (gmii_rxd == 8'h55)) skip_en <= 1'b1;endst_preamble: beginif (gmii_rx_dv) begin //解析前导码cnt <= cnt + 5'd1;if ((cnt < 5'd6) && (gmii_rxd != 8'h55)) //7个8'h55 error_en <= 1'b1;else if (cnt == 5'd6) begincnt <= 5'd0;if (gmii_rxd == 8'hd5) //1个8'hd5skip_en <= 1'b1;else error_en <= 1'b1;endendendst_eth_head: beginif (gmii_rx_dv) begincnt <= cnt + 5'b1;if (cnt < 5'd6) des_mac <= {des_mac[39:0], gmii_rxd}; //目的MAC地址else if (cnt == 5'd12) eth_type[15:8] <= gmii_rxd; //以太网协议类型else if (cnt == 5'd13) begineth_type[7:0] <= gmii_rxd;cnt <= 5'd0;//判断MAC地址是否为开发板MAC地址或者公共地址if(((des_mac == BOARD_MAC) ||(des_mac == 48'hff_ff_ff_ff_ff_ff))&& eth_type[15:8] == ETH_TYPE[15:8] && gmii_rxd == ETH_TYPE[7:0])skip_en <= 1'b1;else error_en <= 1'b1;endendendst_ip_head: beginif (gmii_rx_dv) begincnt <= cnt + 5'd1;if (cnt == 5'd0) ip_head_byte_num <= {gmii_rxd[3:0], 2'd0};else if ((cnt >= 5'd16) && (cnt <= 5'd18))des_ip <= {des_ip[23:0], gmii_rxd}; //目的IP地址else if (cnt == 5'd19) begindes_ip <= {des_ip[23:0], gmii_rxd};//判断IP地址是否为开发板IP地址if ((des_ip[23:0] == BOARD_IP[31:8]) && (gmii_rxd == BOARD_IP[7:0])) beginif (cnt == ip_head_byte_num - 1'b1) beginskip_en <= 1'b1;cnt <= 5'd0;endend else begin//IP错误,停止解析数据 error_en <= 1'b1;cnt <= 5'd0;endend else if (cnt == ip_head_byte_num - 1'b1) beginskip_en <= 1'b1; //IP首部解析完成cnt <= 5'd0;endendendst_udp_head: beginif (gmii_rx_dv) begincnt <= cnt + 5'd1;if (cnt == 5'd4) udp_byte_num[15:8] <= gmii_rxd; //解析UDP字节长度 else if (cnt == 5'd5) udp_byte_num[7:0] <= gmii_rxd;else if (cnt == 5'd7) begin//有效数据字节长度,(UDP首部8个字节,所以减去8)data_byte_num <= udp_byte_num - 16'd8;skip_en <= 1'b1;cnt <= 5'd0;endendendst_rx_data: begin//接收数据,转换成32bit if (gmii_rx_dv) begindata_cnt <= data_cnt + 16'd1;rec_en_cnt <= rec_en_cnt + 2'd1;if (data_cnt == data_byte_num - 16'd1) beginskip_en <= 1'b1; //有效数据接收完成data_cnt <= 16'd0;rec_en_cnt <= 2'd0;rec_pkt_done <= 1'b1;rec_en <= 1'b1;rec_byte_num <= data_byte_num;end//先收到的数据放在了rec_data的高位,所以当数据不是4的倍数时,//低位数据为无效数据,可根据有效字节数来判断(rec_byte_num)if (rec_en_cnt == 2'd0) rec_data[31:24] <= gmii_rxd;else if (rec_en_cnt == 2'd1) rec_data[23:16] <= gmii_rxd;else if (rec_en_cnt == 2'd2) rec_data[15:8] <= gmii_rxd;else if (rec_en_cnt == 2'd3) beginrec_en <= 1'b1;rec_data[7:0] <= gmii_rxd;endendendst_rx_end: begin //单包数据接收完成 if (gmii_rx_dv == 1'b0 && skip_en == 1'b0) skip_en <= 1'b1;enddefault: ;endcaseendendendmodule
2.18 udp数据发送模块
`timescale 1ns / 1ps
//udp数据发送模块module udp_tx (input clk, //时钟信号input rst_n, //复位信号,低电平有效input tx_start_en, //以太网开始发送信号input [31:0] tx_data, //以太网待发送数据 input [15:0] tx_byte_num, //以太网发送的有效字节数input [47:0] des_mac, //发送的目标MAC地址input [31:0] des_ip, //发送的目标IP地址 input [31:0] crc_data, //CRC校验数据input [ 7:0] crc_next, //CRC下次校验完成数据output reg tx_done, //以太网发送完成信号output reg tx_req, //读数据请求信号output reg gmii_tx_en, //GMII输出数据有效信号output reg [ 7:0] gmii_txd, //GMII输出数据output reg crc_en, //CRC开始校验使能output reg crc_clr //CRC数据复位信号
);//parameter define//开发板MAC地址 00-11-22-33-44-55parameter BOARD_MAC = 48'h00_11_22_33_44_55;//开发板IP地址 192.168.1.123 parameter BOARD_IP = {8'd192, 8'd168, 8'd1, 8'd123};//目的MAC地址 ff_ff_ff_ff_ff_ffparameter DES_MAC = 48'hff_ff_ff_ff_ff_ff;//目的IP地址 192.168.1.102 parameter DES_IP = {8'd192, 8'd168, 8'd1, 8'd102};localparam st_idle = 7'b000_0001; //初始状态,等待开始发送信号localparam st_check_sum = 7'b000_0010; //IP首部校验和localparam st_preamble = 7'b000_0100; //发送前导码+帧起始界定符localparam st_eth_head = 7'b000_1000; //发送以太网帧头localparam st_ip_head = 7'b001_0000; //发送IP首部+UDP首部localparam st_tx_data = 7'b010_0000; //发送数据localparam st_crc = 7'b100_0000; //发送CRC校验值localparam ETH_TYPE = 16'h0800; //以太网协议类型 IP协议//以太网数据最小46个字节,IP首部20个字节+UDP首部8个字节//所以数据至少46-20-8=18个字节localparam MIN_DATA_NUM = 16'd18;//reg definereg [6:0] cur_state;reg [6:0] next_state;reg [7:0] preamble[7:0]; //前导码reg [7:0] eth_head[13:0]; //以太网首部reg [31:0] ip_head[6:0]; //IP首部 + UDP首部reg start_en_d0;reg start_en_d1;reg [15:0] tx_data_num; //发送的有效数据字节个数reg [15:0] total_num; //总字节数reg trig_tx_en;reg [15:0] udp_num; //UDP字节数reg skip_en; //控制状态跳转使能信号reg [4:0] cnt;reg [31:0] check_buffer; //首部校验和reg [1:0] tx_bit_sel;reg [15:0] data_cnt; //发送数据个数计数器reg tx_done_t;reg [4:0] real_add_cnt; //以太网数据实际多发的字节数//wire define wire pos_start_en; //开始发送数据上升沿wire [15:0] real_tx_data_num; //实际发送的字节数(以太网最少字节要求)//*****************************************************//** main code//*****************************************************assign pos_start_en = (~start_en_d1) & start_en_d0;assign real_tx_data_num = (tx_data_num >= MIN_DATA_NUM) ? tx_data_num : MIN_DATA_NUM;//采tx_start_en的上升沿always @(posedge clk or negedge rst_n) beginif (!rst_n) beginstart_en_d0 <= 1'b0;start_en_d1 <= 1'b0;end else beginstart_en_d0 <= tx_start_en;start_en_d1 <= start_en_d0;endend//寄存数据有效字节always @(posedge clk or negedge rst_n) beginif (!rst_n) begintx_data_num <= 16'd0;total_num <= 16'd0;udp_num <= 16'd0;end else beginif (pos_start_en && cur_state == st_idle) begin//数据长度tx_data_num <= tx_byte_num;//IP长度:有效数据+IP首部长度 total_num <= tx_byte_num + 16'd28;//UDP长度:有效数据+UDP首部长度 udp_num <= tx_byte_num + 16'd8;endendend//触发发送信号always @(posedge clk or negedge rst_n) beginif (!rst_n) trig_tx_en <= 1'b0;else trig_tx_en <= pos_start_en;endalways @(posedge clk or negedge rst_n) beginif (!rst_n) cur_state <= st_idle;else cur_state <= next_state;endalways @(*) beginnext_state = st_idle;case (cur_state)st_idle: begin //等待发送数据if (skip_en) next_state = st_check_sum;else next_state = st_idle;endst_check_sum: begin //IP首部校验if (skip_en) next_state = st_preamble;else next_state = st_check_sum;endst_preamble: begin //发送前导码+帧起始界定符if (skip_en) next_state = st_eth_head;else next_state = st_preamble;endst_eth_head: begin //发送以太网首部if (skip_en) next_state = st_ip_head;else next_state = st_eth_head;endst_ip_head: begin //发送IP首部+UDP首部 if (skip_en) next_state = st_tx_data;else next_state = st_ip_head;endst_tx_data: begin //发送数据 if (skip_en) next_state = st_crc;else next_state = st_tx_data;endst_crc: begin //发送CRC校验值if (skip_en) next_state = st_idle;else next_state = st_crc;enddefault: next_state = st_idle;endcaseend//发送数据always @(posedge clk or negedge rst_n) beginif (!rst_n) beginskip_en <= 1'b0;cnt <= 5'd0;check_buffer <= 32'd0;ip_head[1][31:16] <= 16'd0;tx_bit_sel <= 2'b0;crc_en <= 1'b0;gmii_tx_en <= 1'b0;gmii_txd <= 8'd0;tx_req <= 1'b0;tx_done_t <= 1'b0;data_cnt <= 16'd0;real_add_cnt <= 5'd0;//初始化数组 //前导码 7个8'h55 + 1个8'hd5preamble[0] <= 8'h55;preamble[1] <= 8'h55;preamble[2] <= 8'h55;preamble[3] <= 8'h55;preamble[4] <= 8'h55;preamble[5] <= 8'h55;preamble[6] <= 8'h55;preamble[7] <= 8'hd5;//目的MAC地址eth_head[0] <= DES_MAC[47:40];eth_head[1] <= DES_MAC[39:32];eth_head[2] <= DES_MAC[31:24];eth_head[3] <= DES_MAC[23:16];eth_head[4] <= DES_MAC[15:8];eth_head[5] <= DES_MAC[7:0];//源MAC地址eth_head[6] <= BOARD_MAC[47:40];eth_head[7] <= BOARD_MAC[39:32];eth_head[8] <= BOARD_MAC[31:24];eth_head[9] <= BOARD_MAC[23:16];eth_head[10] <= BOARD_MAC[15:8];eth_head[11] <= BOARD_MAC[7:0];//以太网类型eth_head[12] <= ETH_TYPE[15:8];eth_head[13] <= ETH_TYPE[7:0];end else beginskip_en <= 1'b0;tx_req <= 1'b0;crc_en <= 1'b0;gmii_tx_en <= 1'b0;tx_done_t <= 1'b0;case (next_state)st_idle: beginif (trig_tx_en) beginskip_en <= 1'b1;//版本号:4 首部长度:5(单位:32bit,20byte/4=5)ip_head[0] <= {8'h45, 8'h00, total_num};//16位标识,每次发送累加1 ip_head[1][31:16] <= ip_head[1][31:16] + 1'b1;//bit[15:13]: 010表示不分片ip_head[1][15:0] <= 16'h4000;//协议:17(udp) ip_head[2] <= {8'h40, 8'd17, 16'h0};//源IP地址 ip_head[3] <= BOARD_IP;//目的IP地址 if (des_ip != 32'd0) ip_head[4] <= des_ip;else ip_head[4] <= DES_IP;//16位源端口号:1234 16位目的端口号:1234 ip_head[5] <= {16'd1234, 16'd1234};//16位udp长度,16位udp校验和 ip_head[6] <= {udp_num, 16'h0000};//更新MAC地址if (des_mac != 48'b0) begin//目的MAC地址eth_head[0] <= des_mac[47:40];eth_head[1] <= des_mac[39:32];eth_head[2] <= des_mac[31:24];eth_head[3] <= des_mac[23:16];eth_head[4] <= des_mac[15:8];eth_head[5] <= des_mac[7:0];endendendst_check_sum: begin //IP首部校验cnt <= cnt + 5'd1;if (cnt == 5'd0) begincheck_buffer <= ip_head[0][31:16] + ip_head[0][15:0]+ ip_head[1][31:16] + ip_head[1][15:0]+ ip_head[2][31:16] + ip_head[2][15:0]+ ip_head[3][31:16] + ip_head[3][15:0]+ ip_head[4][31:16] + ip_head[4][15:0];end else if (cnt == 5'd1) //可能出现进位,累加一次check_buffer <= check_buffer[31:16] + check_buffer[15:0];else if (cnt == 5'd2) begin //可能再次出现进位,累加一次check_buffer <= check_buffer[31:16] + check_buffer[15:0];end else if (cnt == 5'd3) begin //按位取反 skip_en <= 1'b1;cnt <= 5'd0;ip_head[2][15:0] <= ~check_buffer[15:0];endendst_preamble: begin //发送前导码+帧起始界定符gmii_tx_en <= 1'b1;gmii_txd <= preamble[cnt];if (cnt == 5'd7) beginskip_en <= 1'b1;cnt <= 5'd0;end else cnt <= cnt + 5'd1;endst_eth_head: begin //发送以太网首部gmii_tx_en <= 1'b1;crc_en <= 1'b1;gmii_txd <= eth_head[cnt];if (cnt == 5'd13) beginskip_en <= 1'b1;cnt <= 5'd0;end else cnt <= cnt + 5'd1;endst_ip_head: begin //发送IP首部 + UDP首部crc_en <= 1'b1;gmii_tx_en <= 1'b1;tx_bit_sel <= tx_bit_sel + 2'd1;if (tx_bit_sel == 3'd0) gmii_txd <= ip_head[cnt][31:24];else if (tx_bit_sel == 3'd1) gmii_txd <= ip_head[cnt][23:16];else if (tx_bit_sel == 3'd2) begingmii_txd <= ip_head[cnt][15:8];if (cnt == 5'd6) begin//提前读请求数据,等待数据有效时发送tx_req <= 1'b1;endend else if (tx_bit_sel == 3'd3) begingmii_txd <= ip_head[cnt][7:0];if (cnt == 5'd6) beginskip_en <= 1'b1;cnt <= 5'd0;end else cnt <= cnt + 5'd1;endendst_tx_data: begin //发送数据crc_en <= 1'b1;gmii_tx_en <= 1'b1;tx_bit_sel <= tx_bit_sel + 3'd1;if (data_cnt < tx_data_num - 16'd1) data_cnt <= data_cnt + 16'd1;else if (data_cnt == tx_data_num - 16'd1) begin//如果发送的有效数据少于18个字节,在后面填补充位//补充的值为最后一次发送的有效数据gmii_txd <= 8'd0;if (data_cnt + real_add_cnt < real_tx_data_num - 16'd1)real_add_cnt <= real_add_cnt + 5'd1;else beginskip_en <= 1'b1;data_cnt <= 16'd0;real_add_cnt <= 5'd0;tx_bit_sel <= 3'd0;endendif (tx_bit_sel == 1'b0) gmii_txd <= tx_data[31:24];else if (tx_bit_sel == 3'd1) gmii_txd <= tx_data[23:16];else if (tx_bit_sel == 3'd2) begingmii_txd <= tx_data[15:8];if (data_cnt != tx_data_num - 16'd1) tx_req <= 1'b1;end else if (tx_bit_sel == 3'd3) gmii_txd <= tx_data[7:0];endst_crc: begin //发送CRC校验值gmii_tx_en <= 1'b1;tx_bit_sel <= tx_bit_sel + 3'd1;if (tx_bit_sel == 3'd0)gmii_txd <= {~crc_next[0],~crc_next[1],~crc_next[2],~crc_next[3],~crc_next[4],~crc_next[5],~crc_next[6],~crc_next[7]};else if (tx_bit_sel == 3'd1)gmii_txd <= {~crc_data[16],~crc_data[17],~crc_data[18],~crc_data[19],~crc_data[20],~crc_data[21],~crc_data[22],~crc_data[23]};else if (tx_bit_sel == 3'd2) begingmii_txd <= {~crc_data[8],~crc_data[9],~crc_data[10],~crc_data[11],~crc_data[12],~crc_data[13],~crc_data[14],~crc_data[15]};end else if (tx_bit_sel == 3'd3) begingmii_txd <= {~crc_data[0],~crc_data[1],~crc_data[2],~crc_data[3],~crc_data[4],~crc_data[5],~crc_data[6],~crc_data[7]};tx_done_t <= 1'b1;skip_en <= 1'b1;endenddefault: ;endcaseendend//发送完成信号及crc值复位信号always @(posedge clk or negedge rst_n) beginif (!rst_n) begintx_done <= 1'b0;crc_clr <= 1'b0;end else begintx_done <= tx_done_t;crc_clr <= tx_done_t;endendendmodule2.19 以太网控制模块
`timescale 1ns / 1ps
//以太网控制模块module eth_ctrl (input clk, //系统时钟input rst_n, //系统复位信号,低电平有效 //ARP相关端口信号 input arp_rx_done, //ARP接收完成信号input arp_rx_type, //ARP接收类型 0:请求 1:应答output arp_tx_en, //ARP发送使能信号output arp_tx_type, //ARP发送类型 0:请求 1:应答input arp_tx_done, //ARP发送完成信号input arp_gmii_tx_en, //ARP GMII输出数据有效信号 input [7:0] arp_gmii_txd, //ARP GMII输出数据//UDP相关端口信号input udp_gmii_tx_en, //UDP GMII输出数据有效信号 input [7:0] udp_gmii_txd, //UDP GMII输出数据 //GMII发送引脚output gmii_tx_en, //GMII输出数据有效信号 output [7:0] gmii_txd //UDP GMII输出数据
);//reg definereg protocol_sw; //协议切换信号//*****************************************************//** main code//*****************************************************assign arp_tx_en = arp_rx_done && (arp_rx_type == 1'b0);assign arp_tx_type = 1'b1; //ARP发送类型固定为ARP应答 assign gmii_tx_en = protocol_sw ? udp_gmii_tx_en : arp_gmii_tx_en;assign gmii_txd = protocol_sw ? udp_gmii_txd : arp_gmii_txd;//根据ARP发送使能/完成信号,切换GMII引脚always @(posedge clk or negedge rst_n) beginif (!rst_n) protocol_sw <= 1'b1;else if (arp_tx_en) protocol_sw <= 1'b0;else if (arp_tx_done) protocol_sw <= 1'b1;endendmodule
3 上位机验证
使用正点原子以太网视频传输上位机即可显示画面
这篇关于FPGA ov5640视频以太网传输的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







