本文主要是介绍【JUC】并发编程 AQS,ReentryLock,CyclicBarrier,CountDownLatch 原理总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
AQS
AQS是什么?重写AQS就能实现锁的效果?
AQS是一个抽象类,是一个并发包的基础组件,用来实现各种锁,同步组件的工具(通过volatile + cas进行实现)。它包含了共享成员变量state、等待队列、条件队列、加锁线程 并发中的核心组件。
共享成员变量state,不同实现中有不同含义。
等待队列,基于Node内部类,实现了一个双向链表。
条件队列,基于Node内部类,实现了一个单项链表,相当于Synchronized的wait和notify的一个等待唤醒机制的条件队列。
AQS自己继承了 AbstractOwnableSynchronizer,owner就是锁的持有者,对于线程信息的封装。
AQS还为我们自己实现锁和同步器采用模板方法模式,提供了一些模板方法。我们只需要根据自己的逻辑实现方法的重写,就可以实现各种不同的互斥/同步等效果。
例如:ReentrantLock 可重入锁的实现,阻塞 加锁 解锁 等操作都是基于 ReentrantLock 内部的AQS组件实现的,本质上ReentrantLock只是提供了一系列相关的API。(Semaphore,CountDownLatch,CyclicBarrier,Renentrantreadwritelock,StampedLock)
AQS有两种模式:独占模式(ReentrantLock CycleBarrier)和 共享模式(Semaphore CountDownLatch)
独占和共享的最大区别就是State的定义不同,独占模式下State只有0和1,共享资源/临界区代码 只能由一个线程来执行,但是共享模式下的State可以为多个,只要是符合条件的当前线程都可以来使用。
补充: AQS的阻塞队列和条件队列的实现,都是通过Node节点,不过是通过Node节点的不同属性,且一个是双向 一个是单向

阻塞队列双向的条件队列单向?
- 阻塞队列中被park( ) 的线程是需要由前继节点老unpark( ) 唤醒的。
- 当node加入到阻塞队列尾部,需要找到前一个节点,把它的waitStatus设置成 -1(表示它有责任唤醒后一个节点)
- 条件队列是由别的线程来signal( ) 唤醒的,且唤醒后会去阻塞队列中。
- 条件队列是FIFO,尾进头出的,不需要双向。
ReentryLock
lock,unlock
lock
- 加锁成功,将state改为1,设置owner为当前线程
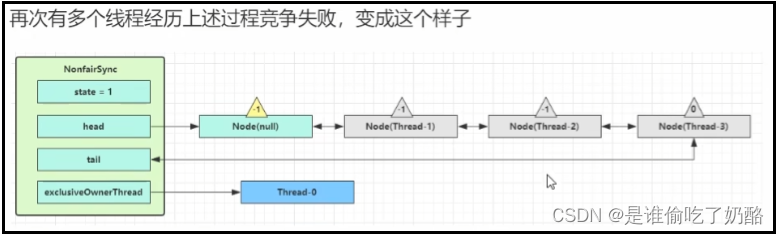
- 加锁失败
- 创建该线程对应的Node节点,并加入等待队列,此时waitStatus为0(默认值)
- 会将加入队列的该线程调用Lock。unpark( ) 来阻塞,然后设置该节点的前驱节点的waitStatus为-1(用于后续unpark( ) 它)
unlock
-
加锁成功的线程要解锁后会unlock( ) 掉阻塞队列中第一个节点的线程,等待队列中出来的线程获取锁成功
- setOwner为自己
- 设置state为1
- 更新等待队列
-
当unlock后,如果被unpark( ) 的线程获取锁失败,重新回到等待队列中,并park( ) 掉
锁重入
lock
- 第一次会正常加上锁,setOwner是自己,然后修改state为1。
- 第二次同一个线程又来加锁了,会检查到当前线程=owner线程,说明发生了锁重入现象。
- 然后会对state++,做一个累加操作,作为锁重入的计数。
unlock
- state–;
- 只是一直对state–,并没有真正的释放锁,当state==0时,说明才真的该释放锁。
- state==0 时再执行unlock方法流程。
可打断
- ReentrantLock分为不可打断模式 和 可打断模式: lock.lock() 不可被打断 lock.lockInterruptibly(); 可被打断
- 使用时在API使用的不同选择的就是不同模式的加锁解锁方式
区别:
- 不可打断模式没有真的打断,只是设置打断标记为true。还是继续停留在等待队列中等待。当获取到锁之后才检查是否被打断,再进行打断。
- 可打断模式打断了,通过抛出异常的方式保证当前线程被打断。
公平,非公平
非公平锁(默认)和公平锁的主要区别在于 tryAcquire( ) 的实现。【尝试获取锁的方法】
当 state == 0 后的操作不同!
- 非公平锁一上来不会看等待队列中是否有阻塞等待的线程,而是直接去cas操作去判断state来竞争锁
- 公平锁一上来不会直接cas操作获取修改state,而是先判断等待队列中是否有优先级比我高的队列,实现了公平
相对来说,非公平锁会更好的性能,因为它的吞吐量比较大。
当然,非公平锁让获取锁的时间变得更加不确定,可能会导致在阻塞队列中的线程长期处于饥饿状态。

公平构造为 FairSync()
条件变量
每个条件变量其实对应着一个等待队列,其实现类是ConditionObject。
ConditionObject中维护了以Node为节点的双向链表所构成的队列。但是只使用了单向!
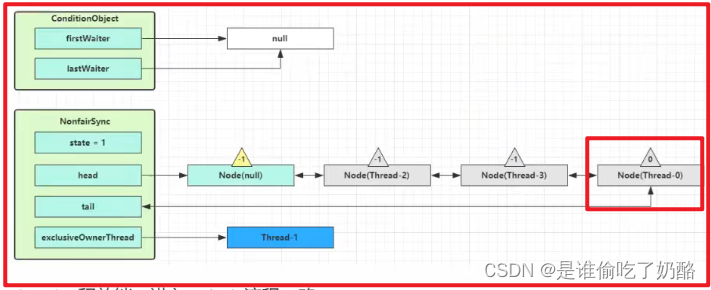
Await( )
- 首先获取到锁,然后条件不满足时调用await( ) 。
- 此时创建一个新的Node状态为 -2,并联这个不满足条件的线程,加入条件队列的尾部。
- 进入AQS的fullRelease,释放掉同步器上的锁。
- 设置owner为null
- setState = 0
- unpark( ) 等待队列中的线程
- 去条件变量中等待的线程也会被park( ) 进入阻塞状态
Signal( )
(有一个节点的转移,会条件队列中获取队头元素转移到等待队列队尾,并重置waitStatus=0)
只有owner中的线程才有资格唤醒条件变量中的所有者!
- 取得在条件变量中(队首)的第一个Node
- 会将满足条件的该线程转移到等待队列中等待下次重新获取锁。
- 并将当前线程状态从-2改为0。因为等待队列中每次增加的元素都默认是0。
锁超时
public boolean tryLock():尝试获取锁,获取到返回 true,获取不到直接放弃,不进入阻塞队列
public boolean tryLock(long timeout, TimeUnit unit):在给定时间内获取锁,获取不到就退出
实现原理
-
成员变量:指定超时限制的阈值,小于该值的线程不会被挂起,会自旋
static final long spinForTimeoutThreshold = 1000L;超时时间设置的小于该值,就会被禁止挂起,因为阻塞在唤醒的成本太高,不如选择自旋空转
-
tryLock()
sync.nonfairTryAcquire(1);// 只尝试一次 -
tryLock(long timeout, TimeUnit unit)
//先尝试一次nonfairTryAcquire()后doAcquireNanos(arg, nanosTimeout); // 获取最后期限的时间戳 // 计算还需等待的时间 // 时间已到 return false; // 如果 nanosTimeout 大于该值,才有阻塞的意义,否则直接自旋会好点
ReentrantLock 对比 Synchronized
ReentrantLock 相对于 synchronized 具备如下特点:
- 锁的实现:synchronized 是 JVM 实现的,而 ReentrantLock 是 JDK 实现的
- 性能:新版本 Java 对 synchronized 进行了很多优化,synchronized 与 ReentrantLock 大致相同
- 使用:ReentrantLock 需要手动解锁,synchronized 执行完代码块自动解锁
- 可中断:ReentrantLock 可中断,而 synchronized 不行
- 公平锁:公平锁是指多个线程在等待同一个锁时,必须按照申请锁的时间顺序来依次获得锁
- ReentrantLock 可以设置公平锁,synchronized 中的锁是非公平的
- 不公平锁的含义是阻塞队列内公平,队列外非公平
- 锁超时:尝试获取锁,超时获取不到直接放弃,不进入阻塞队列
- ReentrantLock 可以设置超时时间,synchronized 会一直等待
- 锁绑定多个条件:一个 ReentrantLock 可以同时绑定多个 Condition 对象,更细粒度的唤醒线程
- 两者都是可重入锁
CyclicBarrier 对比 CountDownLatch
使用上的区别就是 CountDownLatch 的计数只能使用一次,CyclicBarrier在计数变为0之后,会重置计数!
- 等待主体不同。调用await( ) 方法的对象不同。
- CountDownLatch是主线程调用await( ) 来等待其他线程将state减为0再来执行。阻塞的是主线程。
- CyclicBarrier是工作线程调用await( ) ,await( ) 方法会对自身维护的计数器 -1 操作。阻塞的是工作线程。
- 多组线程等待共同到达一个栅栏点,通过 signalAll( ) 一起出来,并且把 count 重新置为 parties。
- CountDownLatch是通过AQS的State信号量来实现的,而CyclicBarrier是直接借助ReentrantLock加上Condition 等待唤醒的功能 进而实现的。
这篇关于【JUC】并发编程 AQS,ReentryLock,CyclicBarrier,CountDownLatch 原理总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




