本文主要是介绍STM32单片机实战开发笔记-I2C通讯总线【wulianjishu666】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
嵌入式单片机开发实战例程合集:
链接:https://pan.baidu.com/s/11av8rV45dtHO0EHf8e_Q0Q?pwd=28ab
提取码:28ab
I2C模块测试
- 功能描述
I2C总线接口连接微控制器和串行I2C总线。它提供多主机功能,控制所有I2C总线特定的时序,协议,仲裁和定时。支持标准和快速两种模式,同时与SMBus 2.0兼容.
- 主要特性
- 并行总线/I2C总线协议转换器
- 多主机功能:同一接口即可做主设备也可做从设备
- I2C主设备功能
- 产生时钟
- 产生起始和停止信号
- I2C从设备功能
- 可编程的I2C地址检测
- 可响应2个从地址的双地址能力
- 停止位检测
- 产生和检测7位/10位地址和广播呼叫
- 支持不同的通讯速度
- 标准速度(高至100KHZ)
- 快速(高至400KHZ)
- 状态标志
- 发送器/接收器模式标志
- 字节发送结束标志
- I2C总线忙标志
- 错误标志
- 主模式时的时钟丢失
- 地址/数据传输后的应答(ACK)错误
- 检测到起始和停止错位
- 禁止拉长时钟功能后的上溢或下溢
- 2个中断向量
- 1个中断用于地址/数据通讯成功
- 1个中断用于出错
- 可选的拉长时钟功能
- 具单字节缓冲器的DMA
- 通信过程
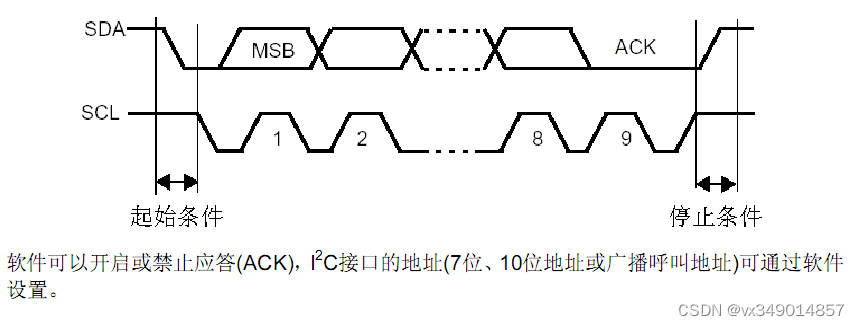
主模式时,I2C接口启动数据传输并产生时钟信号。串行数据传输总是以起始条件开始和停止条件结束。主模式时,由软件控制产生起始条件和停止条件。
从模式时,I2C接口能识别它自己的地址(7位或10位)和广播呼叫地址。软件控制开启或禁止广播呼叫地址的识别。
数据和地址按8位/字节进行传输,高位在前。跟在起始条件后面的第一,二个字节是地址(7位模式为1个字节,10位模式为2个字节)。地址只在主模式发送。
在一个字节传输的8个时钟后的第9个时钟期间,接收器必须回送一个应答位(ACK)给发生器。

- EEPROM
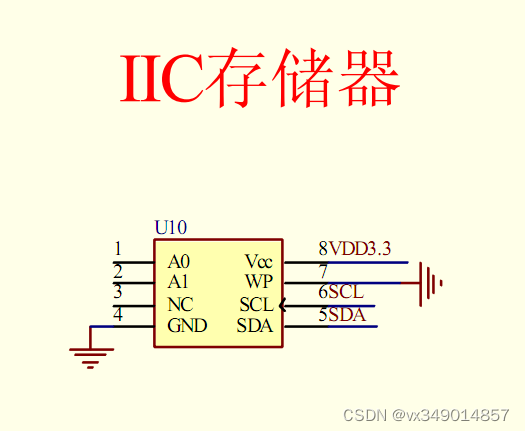
CAT24WC16是CATALYST公司生产的串行电可擦除的可编程存储器。其内部共有128页,每一页为16字节,每一字节为8位。CAT24WC16以一个字节为一个存储单元,共有2K个存储单元。因此任一存储单元的地址为11位(A0~A11),地址范围为0x00~0x7FF(2K地址范围)。
CAT24WC16的特性如下:
- 1.8~6.0V工作电压范围。
- 存储容量为16KB.
- 16字节页写缓冲器。
- 与400KHZ的I2C总线兼容。
- 符合双向数据传输协议。
- 数据保存时间长达100年,具有硬件写保护和软件数据保护功能
- 自动定时擦写周期
引脚说明:
| 引脚名称 | 功能 | 功能描述 |
| VCC GND | 电源,地 | 为芯片提供3.3V电源 |
| A0 A1 A2 | 地址选择 | 在串行总线结构中,最多可以连接8个CAT24WC16芯片,则用A0,A1,A2设置地址以示区别 A0 A1 A2 悬空为0 |
| WP | 写保护 | 此引脚接地允许写操作,接VCC被禁止 |
| SCL | 时钟线 | 串行时钟输入 |
| SDA | 数据线 | 双向串行数据输入/输出 |
5、硬件电路
- 软件代码
/********************************************************************
* 说明 :通过I2C总线实现对EEPROM的读写操作
/*******************************************************************
本实验使用CAT24WC16:
CAT24WC16是CATALSYT公司生产的串行电可擦除的可编程存储器。其内部共有128页,每一页
为16字节,每一个字节8位。CAT24WC16以一个字节为一个存储单元,共有2K个存储单元。因此任一
存储单位地址为11位(A0~A11),地址范围为0x00~0x7FF(2K地址范围)。
*******************************************************************/
#include"stm32f10x_lib.h"
#include"IIC.h"
#define EEPROM_ADDRESS 0xA0
#define I2C2_SLAVE_ADDRESS7 0xA0
#define I2C_Speed 200000
#define I2C_PageSize 16
void I2C_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
I2C_InitTypeDef I2C_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(GPIOB,&GPIO_InitStructure);
/* I2C Configuration */
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //设置I2C为I2C模式
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; //I2C快速模式
I2C_InitStructure.I2C_OwnAddress1 = I2C2_SLAVE_ADDRESS7;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //使能应答
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = I2C_Speed;
/* I2C Peripheral Enable*/
I2C_Cmd(I2C2,ENABLE);
I2C_Init(I2C2,&I2C_InitStructure);
}
void I2C2_Init(void)
{
I2C_Configuration();
}
void I2C_ByteWrite(u8 *pBuffer,u8 WriteAddr)
{
I2C_WaitEepromStandbyState();
/* [1]Send Start Condition 发送起始信号*/
I2C_GenerateSTART(I2C2,ENABLE);
/* [2]Test On EV5 and clear it 起始信号已发送并清除该事件 */
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_MODE_SELECT));
/* [3]Send EEPROM address for write 发送器件地址*/
I2C_Send7bitAddress(I2C2,EEPROM_ADDRESS,I2C_Direction_Transmitter);
/* [4]Test on Ev6 and clear it 地址发送结束 */
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/* [5]Send EEPROM's internal address to write 发送器件内部写入地址 */
I2C_SendData(I2C2,WriteAddr);
/* [6]Test on EV8 _1 and clear it 移位寄存器空 */
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
/* [7]Send the byte to be writeen 发送数据*/
I2C_SendData(I2C2,*pBuffer);
/* [8]Test on EV8 and clear it 发送缓冲区空*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
/* [9]Send STOP condition 发送停止信号 */
I2C_GenerateSTOP(I2C2,ENABLE);
}
void I2C_PageWrite(u8 *pBuffer,u8 WriteAddr,u8 NumByteToWrite)
{
I2C_WaitEepromStandbyState();
/*[1]Send START condition 发送起始条件*/
I2C_GenerateSTART(I2C2,ENABLE);
/*[2]Test on EV5 and clear it 起始信号发送是否成功*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_MODE_SELECT));
/*[3]Send EEPROM address for write 发送器件地址*/
I2C_Send7bitAddress(I2C2,EEPROM_ADDRESS,I2C_Direction_Transmitter);
/*[4]Test on EV6 and clear it 发送器件地址是否成功*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/*[5]Send EEPROM'S internal address to write to 发送数据的写入首地址*/
I2C_SendData(I2C2,WriteAddr);
/*[6]Test on EV8 and clear it 发送内部地址是否成功*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
/*[7]Send data to Written 发送数据*/
while(NumByteToWrite--)
{
/*Send the current byte 发送当前一个字节*/
I2C_SendData(I2C2,*pBuffer);
/* Point to the next byte to be written 地址++*/
pBuffer++;
/*Test on EV8 and clear it 发送缓冲区是否为空*/ while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
}
/*[8]Send STOP condition 发送停止信号*/
I2C_GenerateSTOP(I2C2,ENABLE);
}
void I2C_BufferWrite(u8 *pBuffer,u8 WriteAddr,u16 NumByteToWrite)
{
u8 NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0;
Addr = WriteAddr % I2C_PageSize;
count = I2C_PageSize - Addr;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
I2C_WaitEepromStandbyState();
/* If WriteAddr is I2C_PageSize aligned */
if(Addr == 0)
{
/* If NumByteToWrite < I2C_PageSize */
if(NumOfPage == 0)
{
I2C_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
/* If NumByteToWrite > I2C_PageSize */
else
{
while(NumOfPage--)
{
I2C_PageWrite(pBuffer, WriteAddr, I2C_PageSize);
I2C_WaitEepromStandbyState();
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
if(NumOfSingle!=0)
{
I2C_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
}
}
/* If WriteAddr is not I2C_PageSize aligned */
else
{
/* If NumByteToWrite < I2C_PageSize */
if(NumOfPage== 0)
{
I2C_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
/* If NumByteToWrite > I2C_PageSize */
else
{
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
if(count != 0)
{
I2C_PageWrite(pBuffer, WriteAddr, count);
I2C_WaitEepromStandbyState();
WriteAddr += count;
pBuffer += count;
}
while(NumOfPage--)
{
I2C_PageWrite(pBuffer, WriteAddr, I2C_PageSize);
I2C_WaitEepromStandbyState();
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
if(NumOfSingle != 0)
{
I2C_PageWrite(pBuffer, WriteAddr, NumOfSingle);
I2C_WaitEepromStandbyState();
}
}
}
}
void I2C_WaitEepromStandbyState(void)
{
vu16 SR1_Tmp = 0;
do
{
/* Send START condition */
I2C_GenerateSTART(I2C2, ENABLE);
/* Read I2C1 SR1 register */
SR1_Tmp = I2C_ReadRegister(I2C2, I2C_Register_SR1);
/* Send EEPROM address for write */
I2C_Send7bitAddress(I2C2, EEPROM_ADDRESS, I2C_Direction_Transmitter);
}while(!(I2C_ReadRegister(I2C2, I2C_Register_SR1) & 0x0002));
/* Clear AF flag */
I2C_ClearFlag(I2C2, I2C_FLAG_AF);
}
void I2C_BufferRead(u8 *pBuffer,u8 ReadAddr,u16 NumByteToRead)
{
I2C_WaitEepromStandbyState();
/*Send START Condition 发送起始信号*/
I2C_GenerateSTART(I2C2,ENABLE);
/*Test on EV5 and clear it 检测起始信号是否发送成功*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_MODE_SELECT));
/* In the case of a singel data transfer disable ACK before readint the data*/
if(NumByteToRead==1)
{
I2C_AcknowledgeConfig(I2C2,DISABLE);//如果NumByteToRead则不需1字节一应答
}
/*Send EEPROM ADDRESS for write */
I2C_Send7bitAddress(I2C2,EEPROM_ADDRESS,I2C_Direction_Transmitter);
/* Test on EV6 and clear it*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/* Enable I2C*/
I2C_Cmd(I2C2,ENABLE);
/* Send EEPROM'S internal address to write to*/
I2C_SendData(I2C2,ReadAddr);
/*Test on EV8 and clear it*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED));
/*Send START condition again*/
I2C_GenerateSTART(I2C2,ENABLE);
/*Test on EV5 and clear it*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_MODE_SELECT));
/*Send EEPROM address for read*/
I2C_Send7bitAddress(I2C2,EEPROM_ADDRESS,I2C_Direction_Receiver);
/*Test on EV6 and clear it*/
while(!I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
/*Read Data*/
while(NumByteToRead)
{
/*Test on EV7 and clear it*/
if(I2C_CheckEvent(I2C2,I2C_EVENT_MASTER_BYTE_RECEIVED))
{
if(NumByteToRead == 2)
{
/*Disable Acknowledgement*/
I2C_AcknowledgeConfig(I2C2,DISABLE); //一般在最后一个字节关闭应答
}
if(NumByteToRead == 1)
{
/*Send STOP condition */ //最后一位要关闭应答,发送停止信号
I2C_GenerateSTOP(I2C2,ENABLE);
}
/*Read a byte from the EEPROM*/
*pBuffer = I2C_ReceiveData(I2C2);
/*Point to the next location where the byte read will be saved*/
pBuffer++;
/*Decrement the read bytes counter*/
NumByteToRead--;
}
}
/*Enable Acknowledgement to be ready for anotherreception*/
I2C_AcknowledgeConfig(I2C2,ENABLE); //允许再次应答
}
这篇关于STM32单片机实战开发笔记-I2C通讯总线【wulianjishu666】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






