本文主要是介绍STM32数字示波器+详细注释+上位机程序+硬件,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1、设计指标:
2、功能:
3、上位机的程序
4、测试的照片
5、PCB
6、模拟电路板
7、程序
资料下载地址:STM32数字示波器+详细注释+上位机程序+硬件
1、设计指标:
主控: STM32F103ZET6
液晶屏: 4.3寸TFT480×272 65K彩色LCD显示屏 FSMC
AD: 12位1MHz采样率
最高实时取样率: 1MSa/s 12Bits
取样缓冲器深度: 5K
垂直灵敏度: 5V,1V,500mV,200mV,100mV,50mV,20mV,10mV;
水平时基范围:2S,1S,500mS,200mS,100mS,50mS,20mS,10mS,5mS,2mS,1mS,500uS,200uS,100uS,50uS,20uS,10uS,5uS,2uS,1uS
输入阻抗: ≥1MΩ
最高输入电压: 30Vpp
耦合方式: AC/DC
触发功能: 实现自动、常规、单次触发方式 ,上升或下降边沿触发
参数计算: 频率、周期、占空比、交流峰-峰值、平均值、光标追踪显示
RUN/STOP
2、功能:
1、波形发生器:使用STM32一路DA实现正弦,三角波,方波,白噪声输出。 任意一种波形幅值在0-3.3V任意可调、频率在一定范围任意可调、方波占空比可调。调节选项可以通过触摸屏完成设置。
2、SD卡存储: SD卡波形存储输出,能够对当前屏幕截屏,以JPG格式存储在SD卡上。能够存储1S内的波形数据,可以随时调用查看。
3、数据传输: 用C#编写上位机,通过串口完成对下位机的控制。
(1)实现STOP/RUN功能
(2)输出波形电压、时间参数
(3)控制截屏
(4)控制波形发生器
(5)控制完成FFT
(6)波形的存储和显示
4、图形接口: UCGUI
2、水平扫速: 250 ns*、500ns、1μs、5 μs、10μs、50μs、500 μs、5ms 、50ms
3、垂直电压灵敏度:10mV/div, 20mV/div, 50mV/div, 0.1V/div, 0,2V/div, 0.5V/div, 1V/div,
2V/div, 5V/div
4、被测信号的各种参数屏幕显示,包括频率、电压峰峰值等。
3、上位机的程序
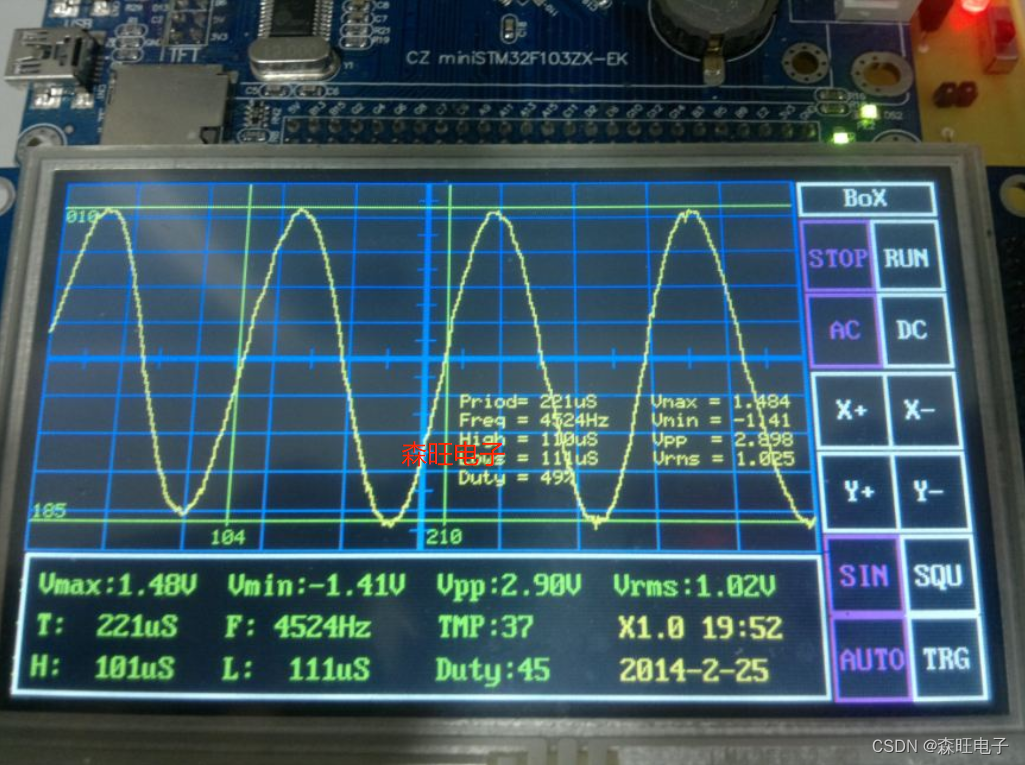
 4、测试的照片
4、测试的照片


5、PCB
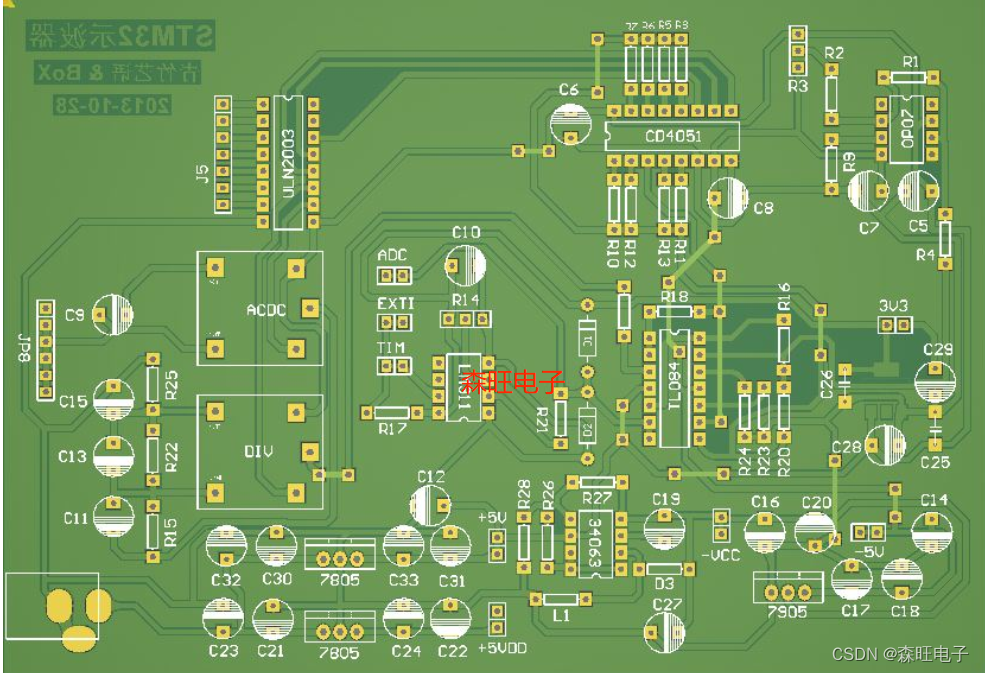
6、模拟电路板


7、程序
/*------------------------------------------------------------------------------------STM32示波器硬件平台:主控器: STM32F103ZET6 64K RAM 512K ROM屏幕器: SSD1963 分辨率: 480x272 16位色触摸屏: TSC2046模拟电路: OP - TL084OP - u741SW - CD4051CMP - LM311PWR - LM7805- LM7905- MC34063- AMS1117-3.3DRI - ULN2003继电器:信号继电器电源: DC +12V软件平台:开发环境: RealView MDK-ARM uVision4.10C编译器 : ARMCCASM编译器:ARMASM连接器: ARMLINK实时内核: uC/OS-II 2.90实时操作系统GUI内核 : uC/GUI 3.90图形用户接口底层驱动: 各个外设驱动程序ROM Size = Code + RO-data +RW-dataRAM Size = RW-data + ZI-dataProgram Size: Code=56024 RO-data=8272 RW-data=256 ZI-data=29912 时间: 2013年11月9日 BoX编写于大二上学期版本: V1.0 - 2013/11/9V1.1 - 2014/2/8V3.0 - 2014/2/19
-------------------------------------------------------------------------------------*/
#include "stm32f10x.h"
#include "ucos_ii.h"
#include "app.h"
#include "GUI.h"#include "usart1.h"
#include "pincfg.h"
#include "delay.h"
#include "tft_api.h"
#include "dac.h"
#include "adc.h"
#include "iwdg.h"
#include "timer.h"
#include "EXTI.H"
#include "oscilloscope.h"
#include "indkey.h"
#include "tsc2046.h"#include "task_rtc.h"
#include "task_gui.h"
#include "task_sd.h"/*-----------------------------------------声明起始任务栈
------------------------------------------*/
OS_STK Task_Start_Stk[TASK_START_STK_SIZE]; /*-----------------------------------------因为涉及到对共享资源的访问,创建互斥信号量
------------------------------------------*/
OS_EVENT *LCD_Buffer_MUTEX;
OS_EVENT *USART_Buffer_MUTEX;
OS_EVENT *SDtoRAM_Buffer_MUTEX;
/*-----------------------------------------主 函 数
------------------------------------------*/
int main(void)
{ INT8U err;SystemInit(); //初始化RCC时钟OSInit(); LCD_Buffer_MUTEX = OSMutexCreate(4,&err); //创建3个共享资源互斥信号量USART_Buffer_MUTEX = OSMutexCreate(4,&err);SDtoRAM_Buffer_MUTEX = OSMutexCreate(4,&err);OSTaskCreate(Task_Start,(void *)0,&Task_Start_Stk[TASK_START_STK_SIZE-1],TASK_START_PRIO); //起始任务 OSStart();
}
/*-------------------------------------------------------------------------------函数功能:初始化各种外设说 明:因为跑操作系统,所以外设的初始化应该放在操作系统的初始任务中完成,不能在while(1)循环外部完成外设的初始化工作,否则操作系统可能无法启动.本函数在app.c中被调用
-------------------------------------------------------------------------------*/
void BSP_Init(void)
{OS_CPU_SR cpu_sr = 0u;OS_ENTER_CRITICAL();DelayInit(); //初始化延时PinCfg(); //外部器件控制配置FSMC_LCD_Init(); //FSMC总线配置 GUI_Init(); //初始化UCGUI界面TSC2046_Config(); //初始化触摸控制器USART1_Config(); //初始化串口DAC_Config(); //初始化DAC1ADC1_Init(); //初始化ADC1EXTI_Config(); //初始化外部中断Key_EXTI_Config(); //初始化按键中断TIM5_Config(1999,71); //TIM5以1MHz频率计数,每2ms溢出中断
// TIM4_Config(59999,71); //TIM4以1MHz频率计数,每60ms溢出中断RTC_Init(); //初始化RTC
// SD_Init();JDQ_ACDC = 1; //交流耦合ManualGainScan(3); //调试用IWDG_Init(4,625); //喂狗时间为1000msOS_EXIT_CRITICAL();
}
这篇关于STM32数字示波器+详细注释+上位机程序+硬件的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








