本文主要是介绍【linux-汇编-点灯之思路-程序】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 1. ARM汇编中的一些注意事项
- 2. IMXULL汇编点灯的前序:
- 3. IMXULL汇编点灯之确定引脚:
- 4. IMXULL汇编点灯之引脚功能编写:
- 4.1 第一步,开时钟
- 4.2 第二步,定功能(MUX)
- 4.3 第三步,定电气属性(PAD)
- 4.4 第四步,定输出/输入
1. ARM汇编中的一些注意事项
在 ARM 中,MOV 指令和 LDR 指令的区别主要体现在以下几个方面:
- 数据传输方向:MOV 指令只能在寄存器之间移动数据,或者将立即数移动到寄存器中;而 LDR 指令可以将数据从内存中读取到寄存器中。
- 立即数的使用:MOV 指令对立即数的范围有要求,只能是由 8 位连续有效位通过偶数次移位能得到的数;LDR 指令的伪指令形式(如 LDR R0, =0xabcdef)则没有立即数范围的限制。
- 功能差异:MOV 不能用于将数据从内存移动到 CPU,而 LDR 可以。LDR 伪指令和 LDR 指令虽然名字相似,但作用不同,LDR 伪指令可以将立即数或地址值写入寄存器,而 LDR 指令用于从内存中读取数据到寄存器。
汇编也是一种编程语言,既然是语言就是有通用的逻辑,和C语言的逻辑一样,汇编也有包括,赋值,逻辑运算,循环,跳转,以及对应硬件的部分的中断之类的,具体对用要实现什么逻辑功能,可以百度对用的逻辑指令和注意事项,多用才能记得熟练;
2. IMXULL汇编点灯的前序:
在STM32学习过程中,对应的要把一个LED灯点亮,总体思路就是控制对应的硬件引脚的高低电平,那么对于IMXULL而言,也是同样的;
在STM32中配置一个引脚的具体步骤如下:
- 开时钟
- 定电气属性,包括速度、模式、上下拉之类的
- 有没有复用,把复用功能指定好
- 定IO口是输出还是输入,IO口(Input/Ouput的缩写,不指定输出或者输出模式,就无法进行有效的控制)如下图:

因此对于IMXULL而言,步骤也是如此;但是在STM32中是用C语言实现的,但是IMXULL中是由汇编实现的,但是具体的内在逻辑是一致的;
3. IMXULL汇编点灯之确定引脚:
每个芯片厂商对自己的引脚都有自己的一套命名规则,而对于NXP一个引脚命令规则有两个,因为其采用了:IOMUXC(Input-Ouput-Muxing-Control)模式,也就是一个引脚可以进行很多种复用功能
关注两点,一个引脚有两个名称,对应两个不同的寄存器地址,分别是MUX(Muxng)配置模式和PAD(Pad)配置电器属性:
- IOMUXC_SW_
MUX_CTL_PAD_GPIO1_IO03:配置GPIO1_IO03引脚的功能,MUX配置模式,PAD配置电气属性 - IOMUXC_SW_
PAD_CTL_PAD_GPIO1_IO03:配置电气属性,与MUX是一一对应的,PAD的意思是焊盘
IOMUXC_SW_MUX_ CTL_PAD_GPIO1_IO03:数据手册说明

IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03:数据手册说明

4. IMXULL汇编点灯之引脚功能编写:
4.1 第一步,开时钟
确定完引脚后,第一步就是开启时钟,这里为了简便表示可以把时钟全部打开,找到GPIO1时钟介绍的数据手册:把对应位设置为11就是开启时钟,这里为了简便,把CCR0~CCR6的时钟全部开启:

具体汇编实现如下:这里不用MOV指令,是因为这些文件是烧录在SD卡上,启动后加载到RAM内存中,也就是在存储中对这些值进行访问,取到这些值后再放到寄存器中,因此取值用的是ldr
.global _start @全局标号_start:/*初始化使能所有外设时钟*/ldr r0,=0x020c4068 @CCGR0ldr r1,=0xffffffff @要向CCGR0写入的数据str r1,[r0] @将0xffffffff写入到CCGR0中ldr r0,=0x020c406c @CCGR1str r1,[r0]ldr r0,=0x020c4070 @CCGR2str r1,[r0]ldr r0,=0x020c4074 @CCGR3str r1,[r0]ldr r0,=0x020c4078 @CCGR4str r1,[r0]ldr r0,=0x020c407c @CCGR5str r1,[r0]ldr r0,=0x020c4080 @CCGR6str r1,[r0]4.2 第二步,定功能(MUX)
第二步就是配置GPIO1_IO3引脚的的复用模式是GPIO1功能,也就是IO口(输入和输出的功能),也就是令:IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03=0x0101=5,也就是在GPIO1_IO03对应的寄存器地址写入5的内容,具体汇编实现如下:
/*第二步 复用引脚:GPIO1_IO03 PIN的复用为GPIO 设置:IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03=5IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03的地址为:0x020E0068*/ldr r0,=0x020E0068 @IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03地址ldr r1,=0x5 @要向IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03写入的数据str r1,[r0] @将0x5写入到0x020E0068对应寄存器中
4.3 第三步,定电气属性(PAD)
第三步就是配置GPIO1_IO3引脚的电气属性,也就是配置:IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03:寄存器的电气属性,其中具体可参考数据手册,具体就是如下:
/* 第三步:配置电气属性GPIO1_1O03的电气属性:* 也就是寄存器:IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03* 寄存器IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03地址: 0x020E02F4* bit0: 0 低速率* bit5:3 110 R0/6* bit7:6 10 100MHZ* bit11: 0 关闭,开路输出* bit12: 1 使能保持* bir13: 0 keeper* bit15:14 00 100K下拉* bit16: 0 关闭hys* total: 0x10B0*/ldr r0,=0x020E02F4 @IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03ldr r1,=0x10B0 @要向IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03写入的数据str r1,[r0] @
4.4 第四步,定输出/输入
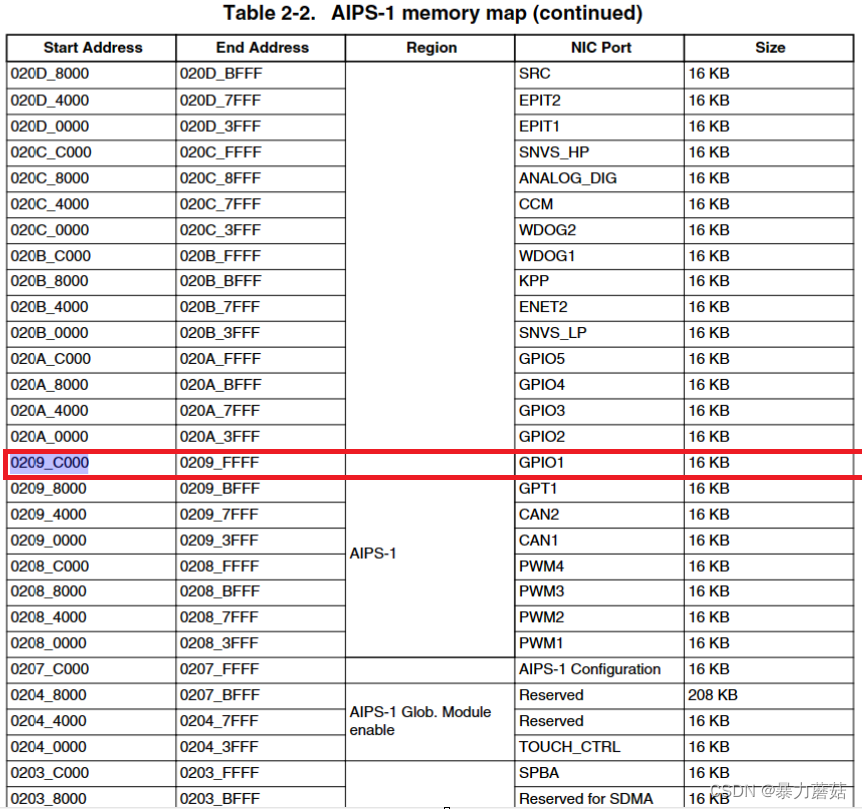
第四步就是配置GPIO1_IO3的功能,首先对于一个GPIO而言,要想输出0或者1,那么不能凭空输出吧,因此要先对引脚赋值为1或者0,然后让这个引脚进行输出,不然单单一个输出,输出的数据是0还是1呢?所以就是先写数据,然后进行输出,总体思路就是这样,由于我们配置的模式是GPIO(General Purpose Input/Output)的模式,因此在参考手册中找到对应的GPIO的章节,这里注意GPIO和IIC或者其他的模式一样,每一个模式都有对应的寄存器介绍,只需找到对应的寄存器的介绍说明就行:这里截取GPIO_IO3的GPIO模式的对应说明参考手册:要注意我们配置的是GPIO1,但是在GPIOx这里的地址是:0x0209C000
其中DR(data register)寄存器就是设置数据的,而DIR寄存器就是设置输入还是输出的;两个寄存器是挨着的,地址的便宜是4,可以根据参考手册看出来

/* 设置GPIO1的功能 * 设置GPIO1_GDIR寄存器,设置GPIO1_GPIO3为输出 * GPIO1_GDIR寄存器的地址是:209_C004* 设置:GPIO1_GDIR寄存器bit3为1,也就是:GPIO1_GPIO3为输出*/ldr r0,=0x0209c004ldr r1,=0x8str r1,[r0]
/* 打开LED,也就是设置GPIO1_IO03为低0
* GPIO1_DR的地址为:0x0209c000
* */ldr r0,=0x0209c000ldr r1,=0str r1,[r0]loop:b loop
这篇关于【linux-汇编-点灯之思路-程序】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




