本文主要是介绍YOLOv8得到物体的坐标中心点信息,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
因为我通过摄像头仅仅框出物体位置,但是我并没有得到更多的信息,而物体中心坐标是一个很重要的信息,有了它我们可以实现物体追踪,视觉追踪等功能,所以第一步,我们就要想办法如何得到物体的中心点的信息。
通过浏览CSDN,网上很多都是直接改源码,只做到打印输出坐标,单丝没办法存到一个变量里面,所以我只能去官网获取一些信息了。
官网 Predict - Ultralytics YOLOv8 Docs 上说:

意思是:我们可以调用boxes.xxx函数来得到目标的边界框。
继续看:
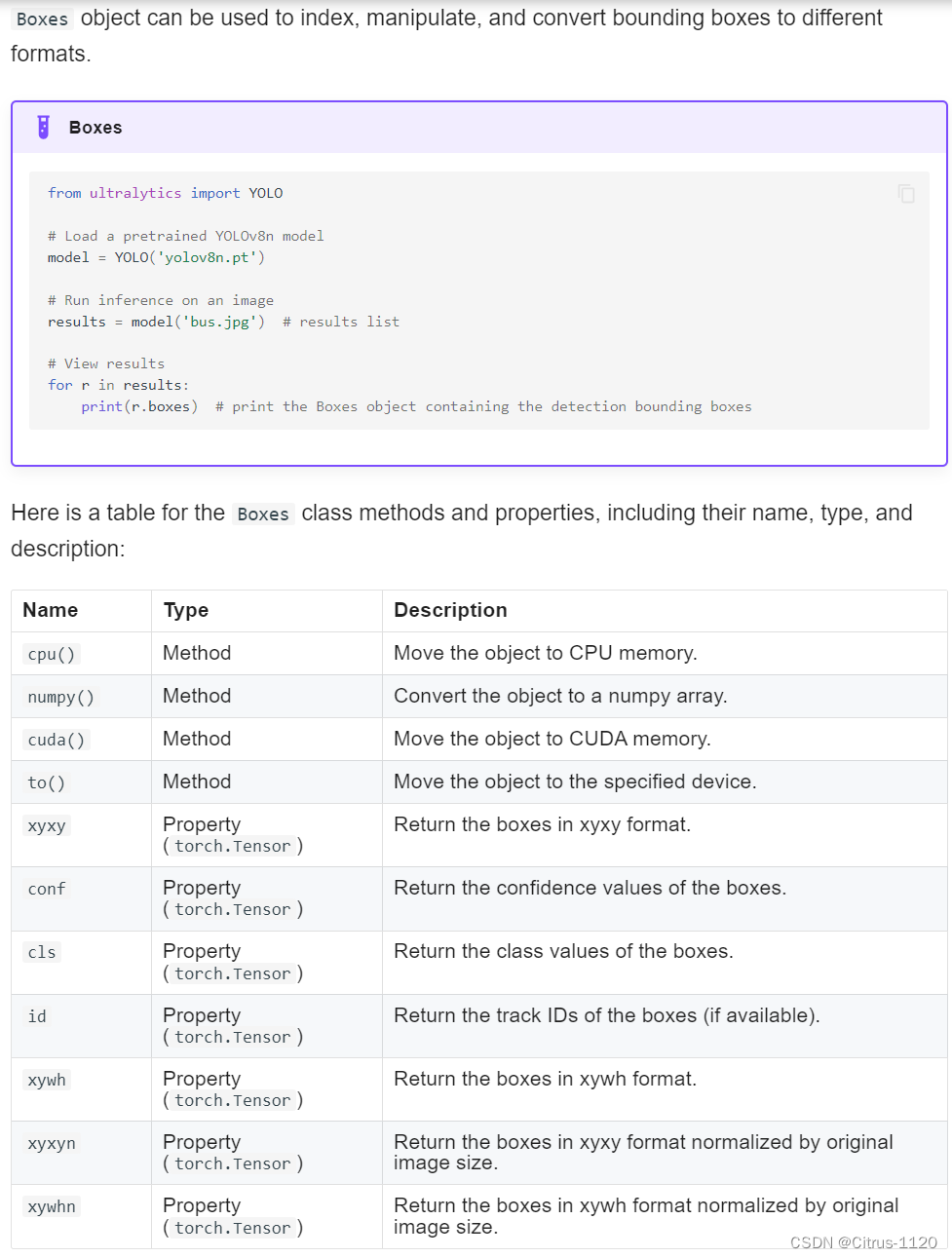
我们可以调用这些函数来得到我们的边界框坐标信息,所以我就开始尝试。这里给出我的输出检测物体坐标的代码:
from ultralytics import YOLO
import cv2
model = YOLO(r"D:\yolov8\runs\detect\train\weights\best.pt") #模型初始化
# 加载 YOLOv8 模型
# 获取摄像头内容,参数 0 表示使用默认的摄像头
cap = cv2.VideoCapture(0)while cap.isOpened():success, frame = cap.read() # 读取摄像头的一帧图像results = model(frame,conf=0.7) #参数选择(置信度>=0.7才显示出来,可自己调)annotated_frame = results[0].plot() #(置信度最高的一帧图像取出来)for r in results: # 对结果进行处理for detection in r.boxes.xywh: # detection获取边界信息并保留在列表中# 提取中心点 x 坐标、中心点 y 坐标、宽度和高度x = detection[0].item() # x坐标为列表中的第一个y = detection[1].item() # y坐标为列表中的第二个w = detection[2].item() # 矩形框宽度为列表中的第三个h = detection[3].item() # 矩形框高度为列表中的第四个print("中心点 x 坐标:", x)print("中心点 y 坐标:", y)if success:cv2.imshow("YOLOv8 Inference", annotated_frame)# 通过按下 'q' 键退出循环if cv2.waitKey(1) & 0xFF == ord('q'):breakcap.release() # 释放摄像头资源
cv2.destroyAllWindows() # 关闭OpenCV窗口结果如图所示:(坐标大小是根据物体在摄像头方框内的位置确定的)
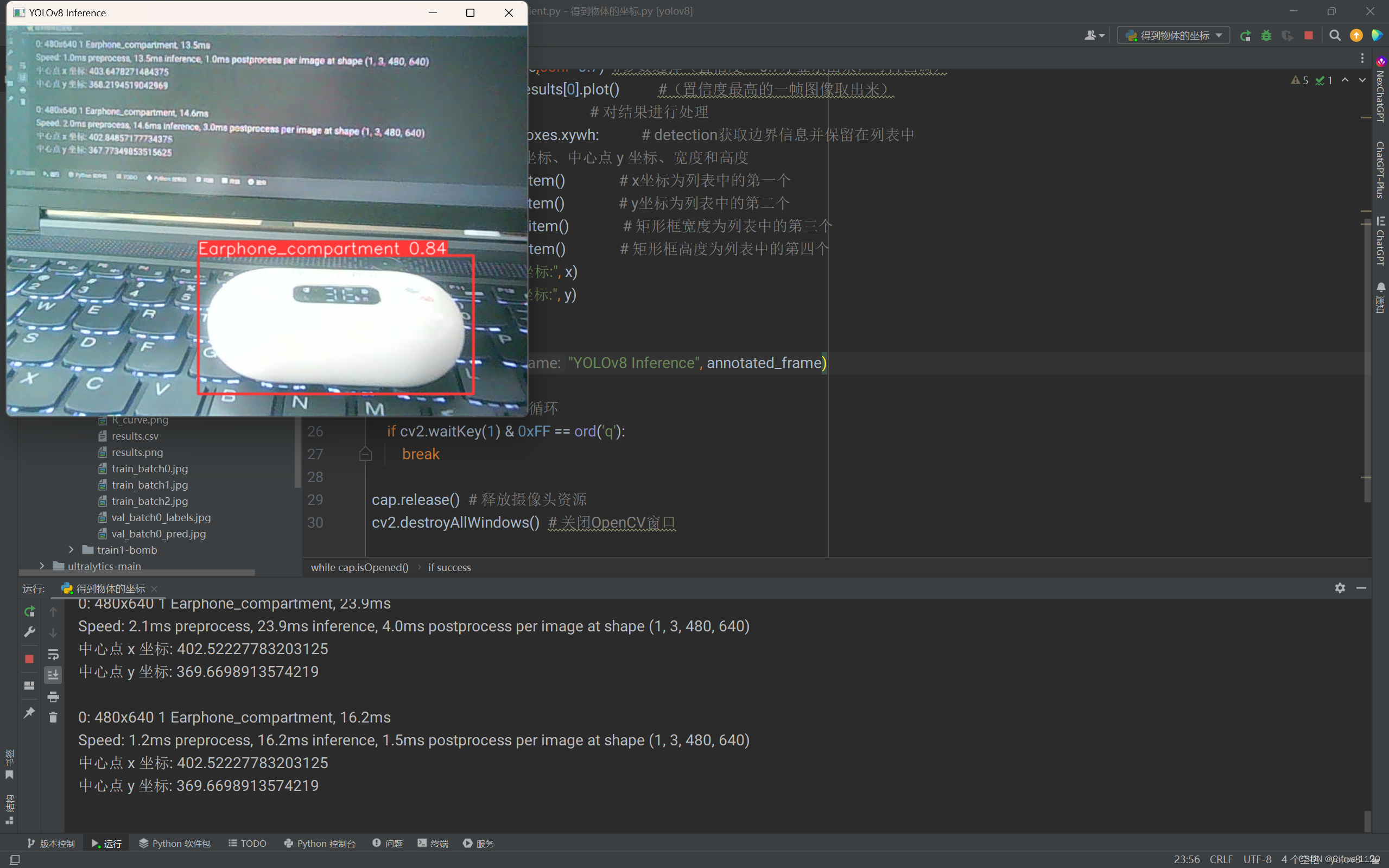
解决!
这篇关于YOLOv8得到物体的坐标中心点信息的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







