本文主要是介绍Hi3519AV100 处理器⾼速全局快⻔相机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
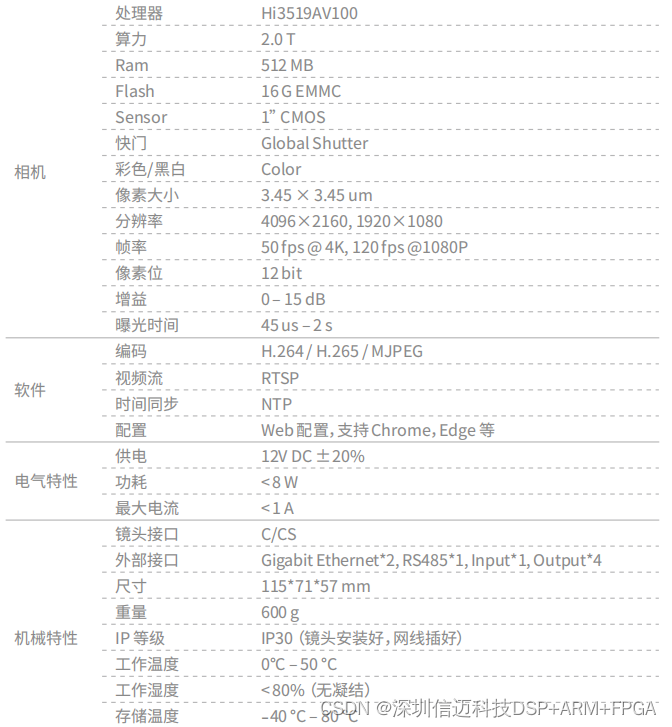
⾼速全局快⻔相机采⽤ 1英⼨全局快⻔ Sensor,⽀持 H.264/H.265 编码,8 百万 分辨率模式下最⾼帧率可达 50 帧/秒,1080P 模式下最⾼帧率可达 120 帧/秒。主控采⽤
Hi3519AV100 处理器,集成 2 Tops AI 算⼒ NPU ,⽀持⼤量
AI 运算,可对⾼速运动物体 (180 km/h)进⾏⾼清⾼帧率摄像,成像清晰,⽆拖影⽆变形,主要应⽤于⾼速公路⻋牌 抓拍识别,⻋辆违章抓拍,赛⻋与球类等体育运动拍摄分析等场景。


这篇关于Hi3519AV100 处理器⾼速全局快⻔相机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!