本文主要是介绍采取更简单的路线,以低功率,9轴运动跟踪,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
对于越来越多的可穿戴设备和物联网设计,检测方向和跟踪运动的能力正在成为一个关键的要求。尽管有大量可用的运动传感器,但工程师们不断受到挑战,要求更快速有效地将这些设备集成到更低的功率中,这对额外的传感器来说尤其具有挑战性。
为了满足这些运动跟踪的挑战,设计师需要更多的集成加速度计、陀螺仪和磁强计硬件,以及更高效和更智能的数据融合算法。
本文将介绍TDK InvenSense的一个解决方案,它可以帮助硬件和软件。它将展示设计师如何应用它来简化复杂的低功率多传感器应用的开发,这些应用需要复杂的运动传感能力。
高效运动跟踪的挑战
在传统的运动跟踪方法中,开发人员处理硬件和软件的集成问题。在硬件方面,开发人员通常会努力最小化复杂性、大小和部件的数量,这些设计包括了包括加速计、陀螺仪和磁力仪在内的独立传感器。软件工程师需要特别注意同步不同的传感器输出,以创建用于高级运动跟踪应用程序的传感器融合算法所需的统一数据流。对于硬件和软件开发人员来说,需要在设计中集成更多类型的传感器的应用程序面临着巨大的挑战。
然而,使用TDK InvenSense ICM-20948,开发人员可以用最少的努力快速地实现运动跟踪设计或其他多传感器系统。
运动跟踪解决方案
TDK InvenSense ICM-20948是一个集成了传感器、信号链、数字处理和接口电路的多芯片模块,用于提供一个完整的运动跟踪解决方案(图1),它仅测量3毫米x3毫米x1毫米。
TDK InvenSense ICM-20948图像。
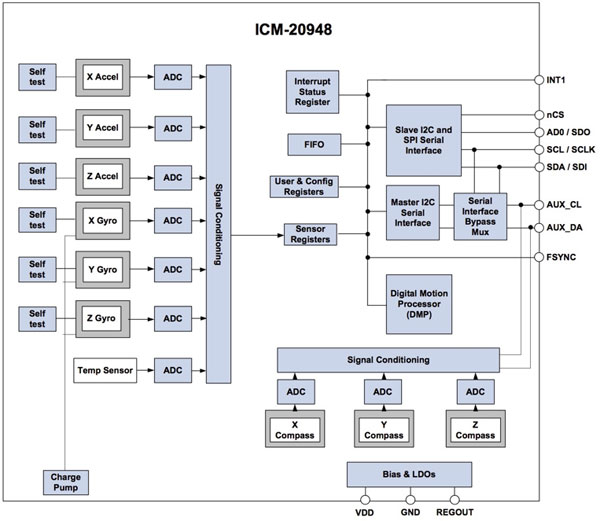
图1:TDK InvenSense ICM-20948通过其专用信号链、可编程滤波器、接口电路和数字运动处理器实现运动跟踪。
对于所有的功能,模块只需要大约3毫安(mA)的全操作模式。对于电量有限的应用程序,开发人员可以关闭部分模块,减少电流消耗阶段,到8微安(μA)完整的睡眠模式。由此产生的电能消耗取决于运行电压(VDD),根据设计要求,可以在1.71伏特和3.6伏特之间。
集成在模块中,独立的信号链支持集成三轴加速度计、三轴陀螺仪、三轴磁强计以及集成温度传感器的各通道。每个信号链包括缓冲放大器和一个专用的16位模数转换器(ADC),以及传感器特定的电路,例如驱动模块霍尔效应磁强计的电流源。
为了提高每个信号链的输出,模块包括一个适合于每个进一步传感器类型的信号调节阶段。例如,磁强计输出通过一个算术电路来进行基本信号处理,而其他传感器的输出则会进入到自己的传感器特定条件下,用于处理诸如样本平均等功能。开发人员可以将ICM-20948设置为平均128个gyro数据样本,或者将加速度计平均设置为至多32个样本。最后,从每个通道的信号调节阶段输出到一组专用的传感器寄存器。
在ICM-20948的核心,一个专有的数字运动处理器(DMP)提供了广泛的功能,包括动作处理算法的执行,校准和自我测试。在正常运行期间,DMP处理来自专用传感器寄存器的数据。然后,通过共享的I2C或SPI总线,将结果存储在模块的集成FIFO中,以供主机MCU访问。
DMP和FIFO的功能为许多实际应用程序提供了重要的功能。在许多情况下,应用程序以相对较慢的速度更新其运动跟踪结果,甚至允许它们的主机处理器在更新期间休眠,以减少总体的功耗。然而,运动跟踪算法需要更高的更新率,以确保它们能够在应用程序请求更新时提供最小延迟的精确数据。DMP保持高更新率的能力,没有主机参与,有助于确保准确性,而无需强制要求在主机应用程序本身的性能或功耗。
简单的集成
小足迹、系统集成功能和主机独立操作的结合使得ICM-2094
这篇关于采取更简单的路线,以低功率,9轴运动跟踪的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






