本文主要是介绍被安装劝退?学习ROS的看过来,输入法都安装好了的系统,等你白嫖!,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
看了这边文章,那么恭喜你了,你将不会再为"由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654"、“Failed to fetch 错误”、“ERROR: cannot download default sources list from:”、“ERROR: cannot download default sources list from ”、“出现错误:python-roslaunch : 依赖: python-roslib 但是它将不会被安装”等各种错误折磨。总之就是很爽!!
1.前提说明
本文主要是针对使用虚拟机安装Ubuntu和ROS的小伙伴,如果你是个Ubuntu惯犯或者双系统的大佬,请绕路。众所周知,ROS安装起来很要命,我装了两天,于是,为了帮助学习ROS的小伙伴不用像我这么痛苦,把已经能丝滑使用的系统共享出来。

2.镜像简要说明
这是利用VMware虚拟机软件克隆的。
Ubuntu18.04版本
已安装ROS
已安装搜狗输入法
系统设置的用户名是Wood,密码是123456,大家安装好之后可以自行修改。
3.安装镜像
2.1安装VMWare虚拟机
首先你需要安装VMware虚拟机:可以根据下面的帖进行操作。
第一弹 VM上安装Linux系统(Ubuntu)
完成到第三步就行。
安装完成后是这样的:
2.2 下载克隆系统
记得下载到的目录所在硬盘应留有足够大的空间,这玩意解压之后蛮大的,大约有十六七个G。应该随着库的安装和使用缓存的增多,越用越大。
如果安装的镜像文件有什么问题,欢迎留言或者私信,压缩包我应该是解压之后往虚拟机上试了的没问题再上传网盘的。
(小提示:可以去某夕夕平台上买个一天的会员,大概也就一两块钱,不受限速的气,还是蛮划算的,平时也用不上会员,现买现用,真香)
下载“UbuntuX64_copy.7z”压缩文件:
链接:https://pan.baidu.com/s/1EDF_oP-_Lh6aafTqcMvEcw
提取码:6nf8
(这是.7z格式的压缩包,好像占得内存小一点)
或者下载:
下载“UbuntuX64_copy.zip”压缩文件:
链接:https://pan.baidu.com/s/11_XD1Fu0Kskz2m9BUZcAxg
提取码:pjal
(这是.zip格式的,大一点,里面内容都是一样的,从一个文件夹压缩的,当备用的地址吧)
为了保证压缩的没有问题,我自己解压一遍亲测一次。
经过漫长的等待,终于解压完成了。检查一下里面的内容:

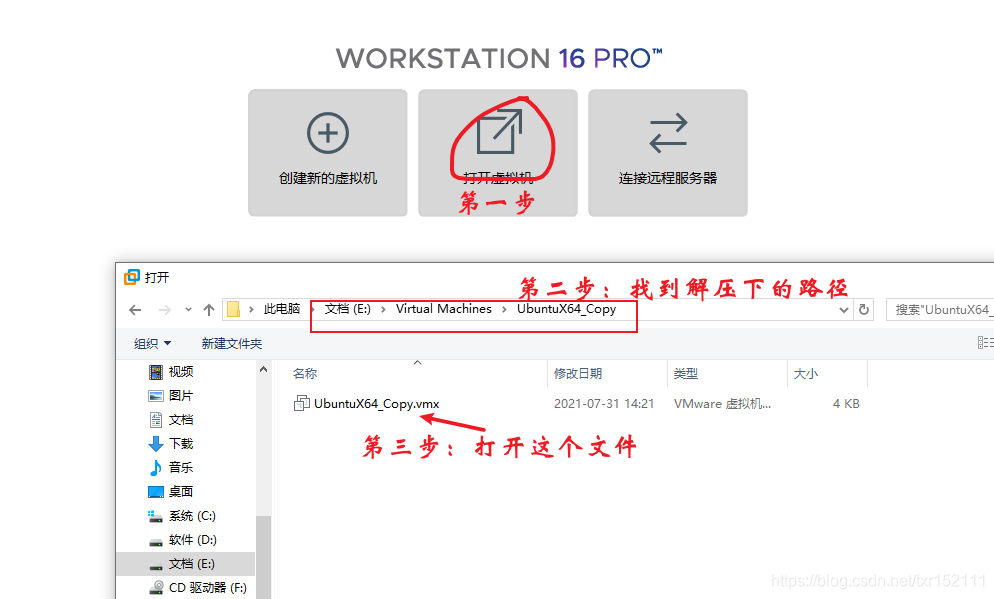
2.3 加载克隆系统
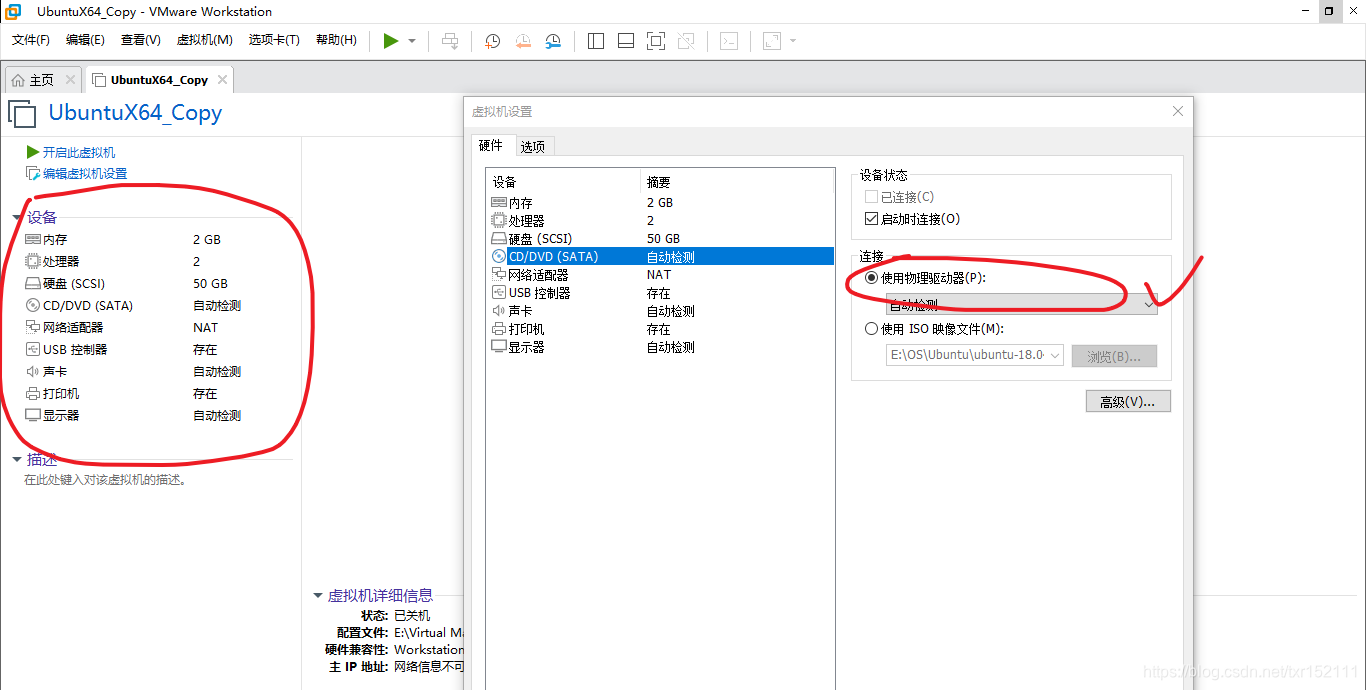
然后界面就是这样了:

把这个地方改成自动检测:
2.4 开机测试
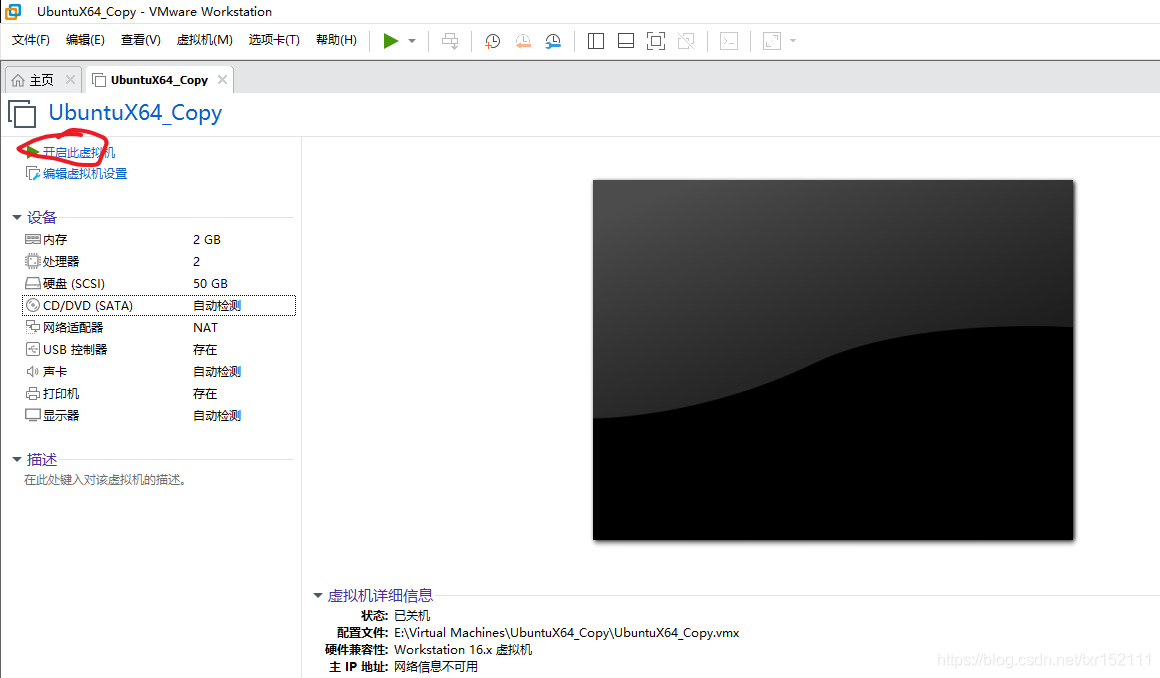
点下开机绿三角,开始开机。
等了一下会,直接进入桌面(我设置了自动登录,所以开机没有输入密码这个环节):
随便打开一个文本,输入文字,会调用已经安装的搜狗输入法:
随便使用一个命令符:
 换什么源都有这个问题:
换什么源都有这个问题:
 但是不影响什么,ros运行没有问题。可能是连接被墙了吧。
但是不影响什么,ros运行没有问题。可能是连接被墙了吧。
2.5 修改用户名和密码
我设置的账号和密码要是配不上你这靓仔,自己更改吧。在设置里:

 修改账号密码:
修改账号密码:
3.调试ROS
可以参考 : 第六弹 ROS命令行工具(单击打开)
在三个终端(快捷键:Ctrl + Alt +T键)分别输入:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key实现用键盘控制小乌龟运动:
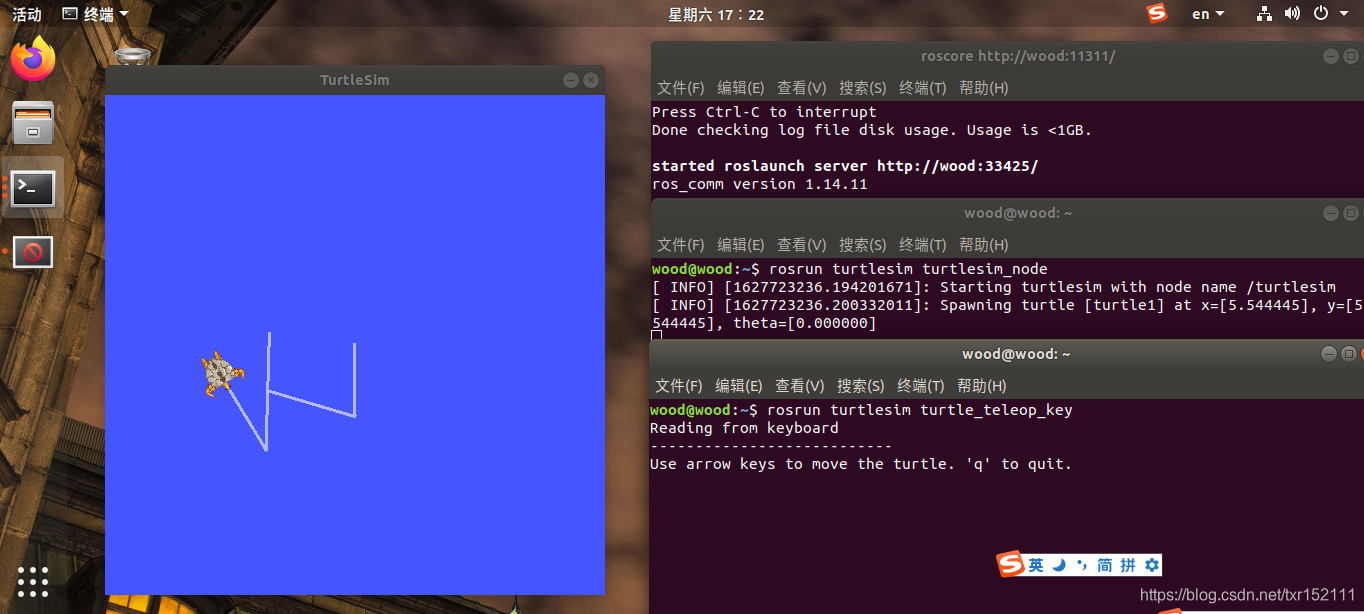
如果可以用键盘控制小海龟,那么恭喜你,就可以好好学ROS的基本内容了。
4. 赠品
基础版:
【古月居】古月·ROS入门21讲 | 一学就会的ROS机器人入门教程
提升版:
ROS九讲:链接:https://pan.baidu.com/s/1nMvgFUxTeMyHC1TSxePqEg 提取码:wm5j
我是刃小木,希望你关注!


这篇关于被安装劝退?学习ROS的看过来,输入法都安装好了的系统,等你白嫖!的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









