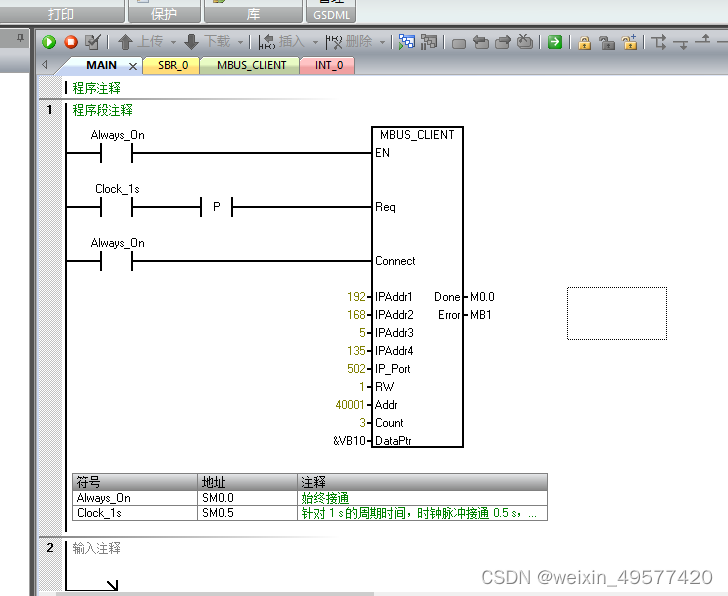
本文主要是介绍smart200 做client,modbus_tcp读取modbus_slave,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
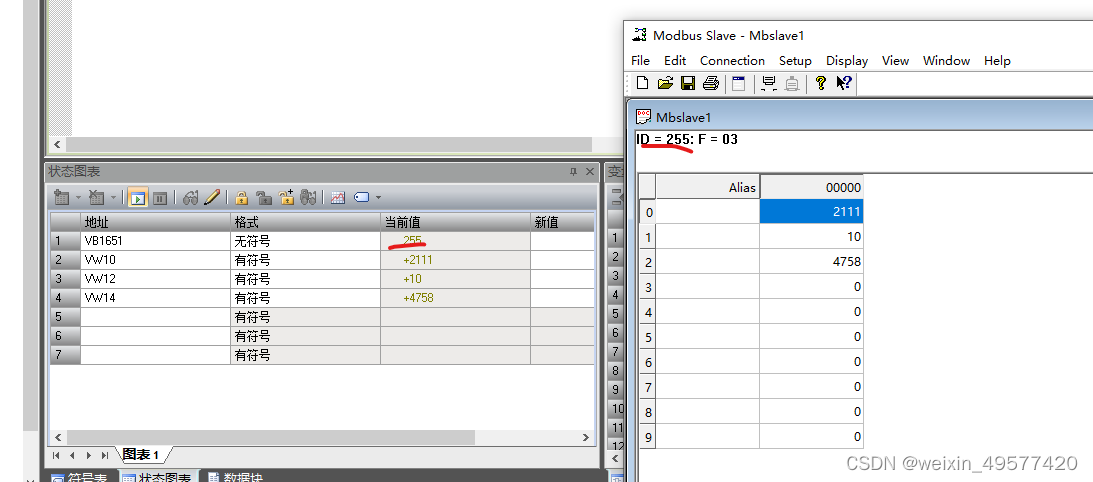
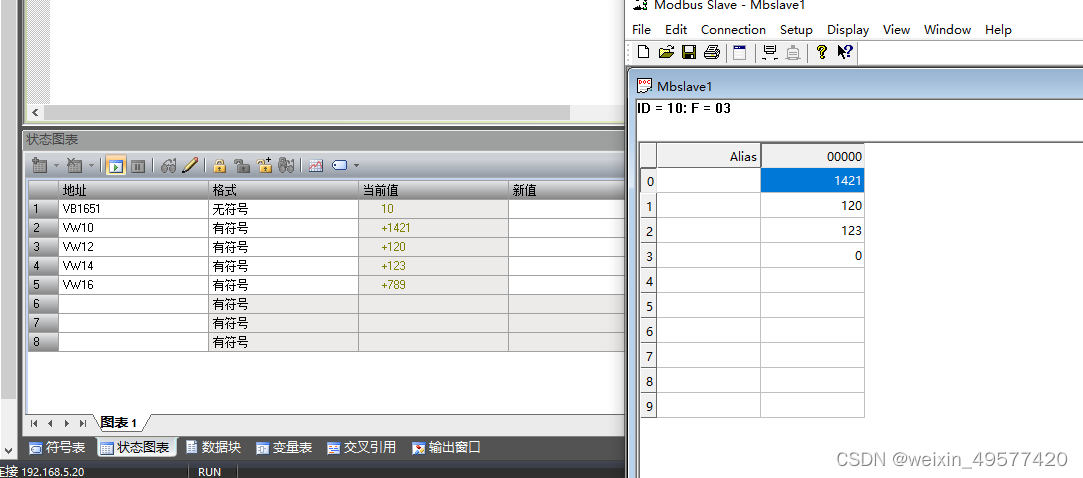
 这里还隐藏一个重要的设置,就是站地址。这个在库函数里。不同plc位置会不一样,我这里是vb1651对应modbus的地址为255,这个值我们可以自己更改,范围为1-247.
这里还隐藏一个重要的设置,就是站地址。这个在库函数里。不同plc位置会不一样,我这里是vb1651对应modbus的地址为255,这个值我们可以自己更改,范围为1-247.

打开modbus_slave 软件,
这篇关于smart200 做client,modbus_tcp读取modbus_slave的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






