本文主要是介绍【stm32】swjtu西南交大嵌入式实验三 外部中断实验:按键中断,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
实验内容:
1、编写程序,设置主程序:跑马灯以 0.2s 的速度旋转;将 KB1 设置为外部中断,下 降沿触发,按下 KB1 则全彩灯的 R 灯闪烁 5 次。编译、下载程序到开发板,观察实 验现象;按下 KB1,观察实验现象。
2、编写程序,设置主程序:跑马灯以 0.2s 的速度旋转;将 KB1,KB2 设置为外部中断, 下降沿触发,按下 KB1 则 R 闪烁 5 次,按下 KB2 则 G 闪烁 5 次。编译、下载程序到 开发板,观察实验现象;分别先后按下 KB1、KB2,观察实验现象。
3、设置主程序:跑马灯以 0.2s 的速度旋转;将 KB1,KB2 设置为外部中断,下降沿触 发,按下 KB1 则 R 闪烁 5 次,按下 KB2 则 G 闪烁 5 次,设置 KB1 外部中断抢占先优 先级设置为 1,KB2 外部中断抢占先优先级设置为 2。编译、下载程序到开发板,先 按下 KB2,G 在闪烁过程中,再按下 KB1,观察实验现象。
4、设置 KB1 和 KB2 外部中断的抢占先优先级均为 1,KB1 外部中断的响应优先级为 1, KB2 外部中断响应优先级为 2。实验时先按下 KB2,LED1 在闪烁过程中,再按下 KB1, 观察实验现象。
5、用短线连接 PE0 和 PE1,当 KB1 和 KB2 外部中断优先级设置不一致,按下 KB1 或 KB2 时,观察实验现象。
6、应用设计: 主程序为 RGB 循环点亮,外部中断 KB1,蜂鸣器播放门铃音,外部中断 KB2,电机顺 时针旋转开门;KB2 的优先级高于 KB1。
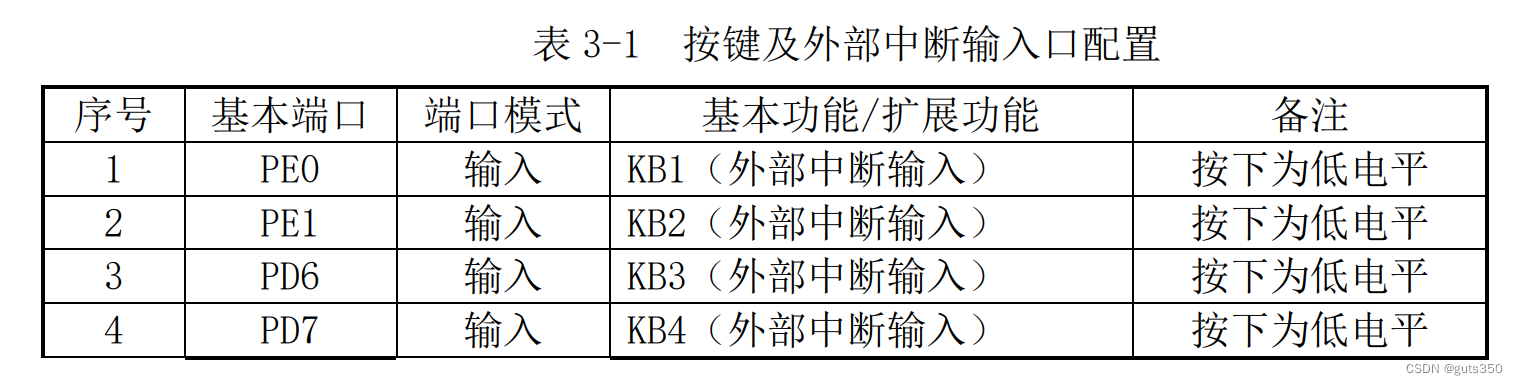
按键及外部中断输入口配置
注意:该实验使用的是按键外部中断,涉及到按键就有抖动,这是个大坑......
使用CubeMX创建工程
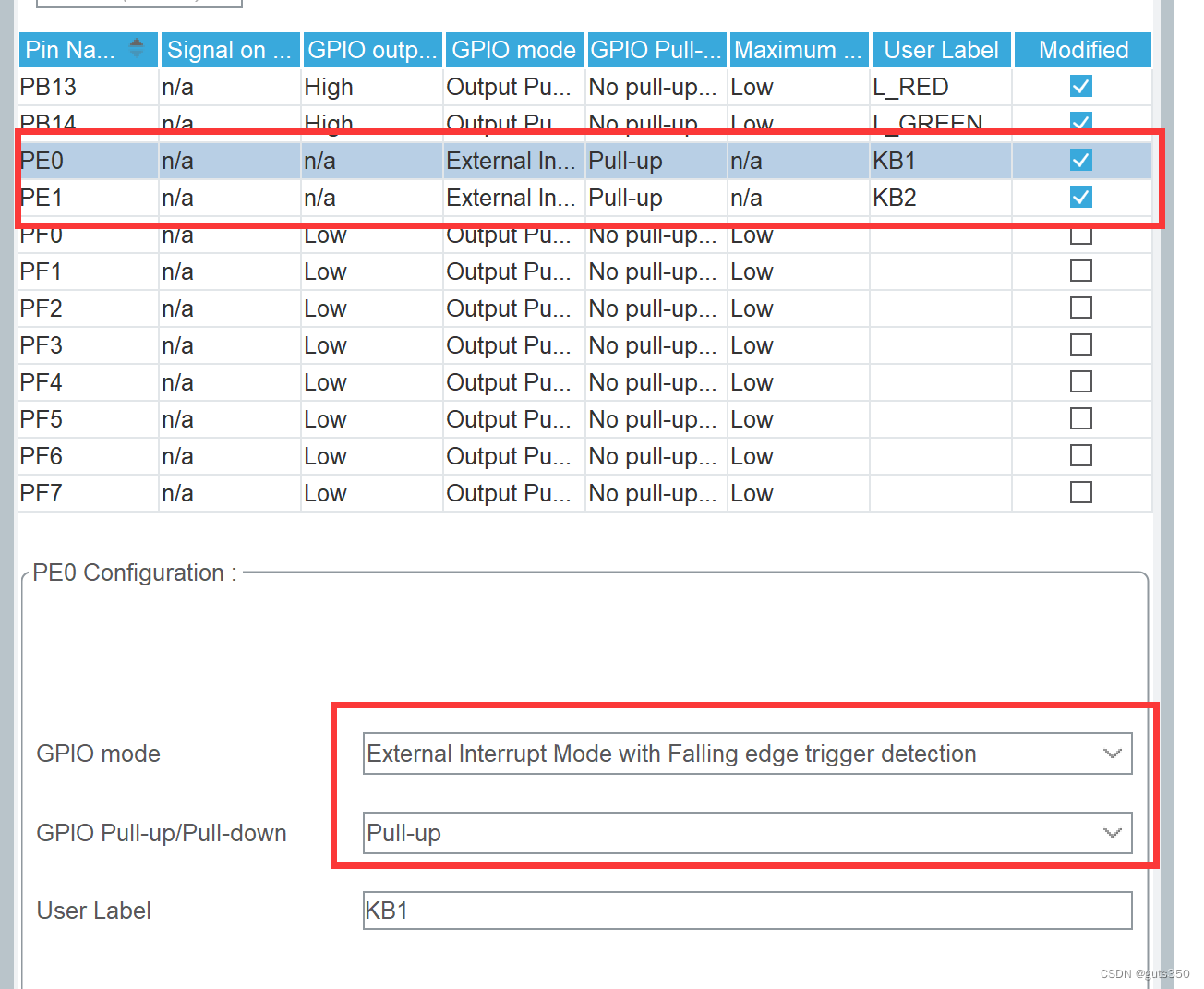
这里只说明按键(PE0、PE1)外部中断的配置:下降沿触发。按下为低电平故内部上拉。
RCC和SYS和前面的实验相同。
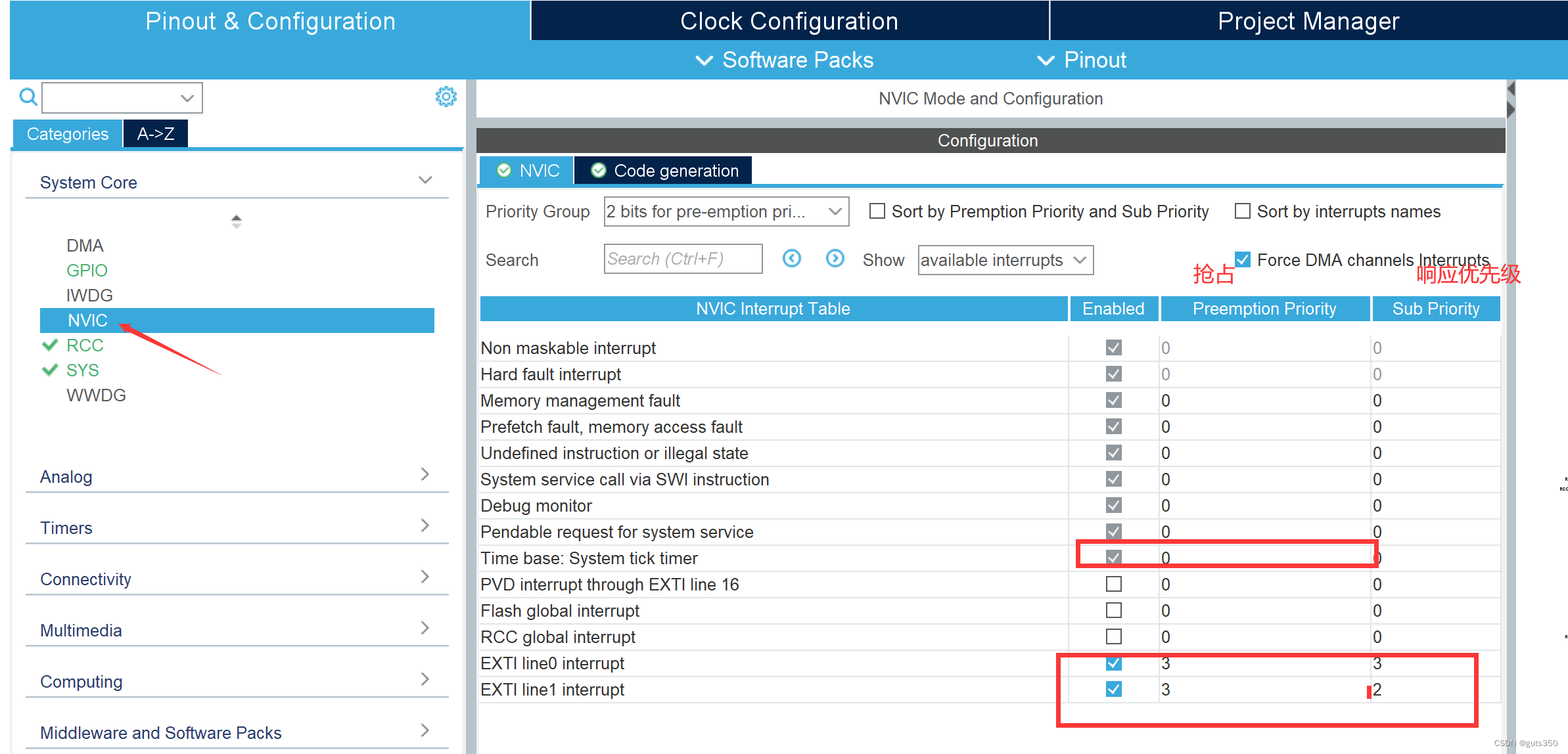
这里要配置NVIC:
将对应的外部中断通道的优先级设置成对应的数字,左是抢占,右边是响应优先级。
注意:如果要在中断程序里用hal_delay要把下面的定时器中断的抢占优先级设为比两个外部中断的优先级高
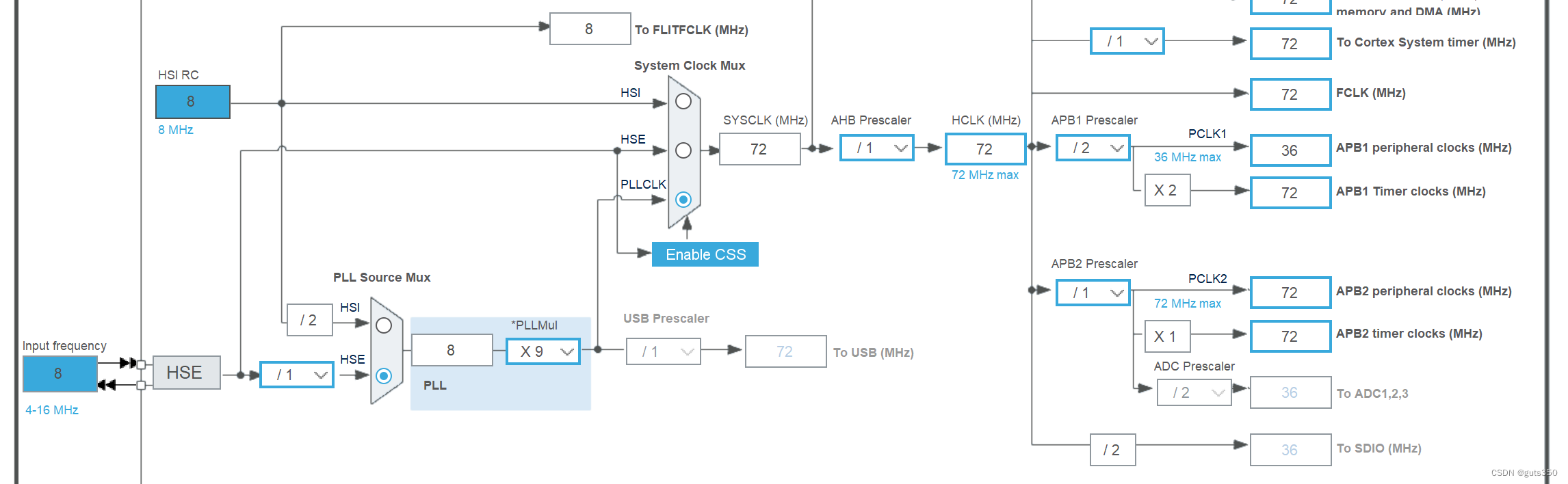
时钟树配置:
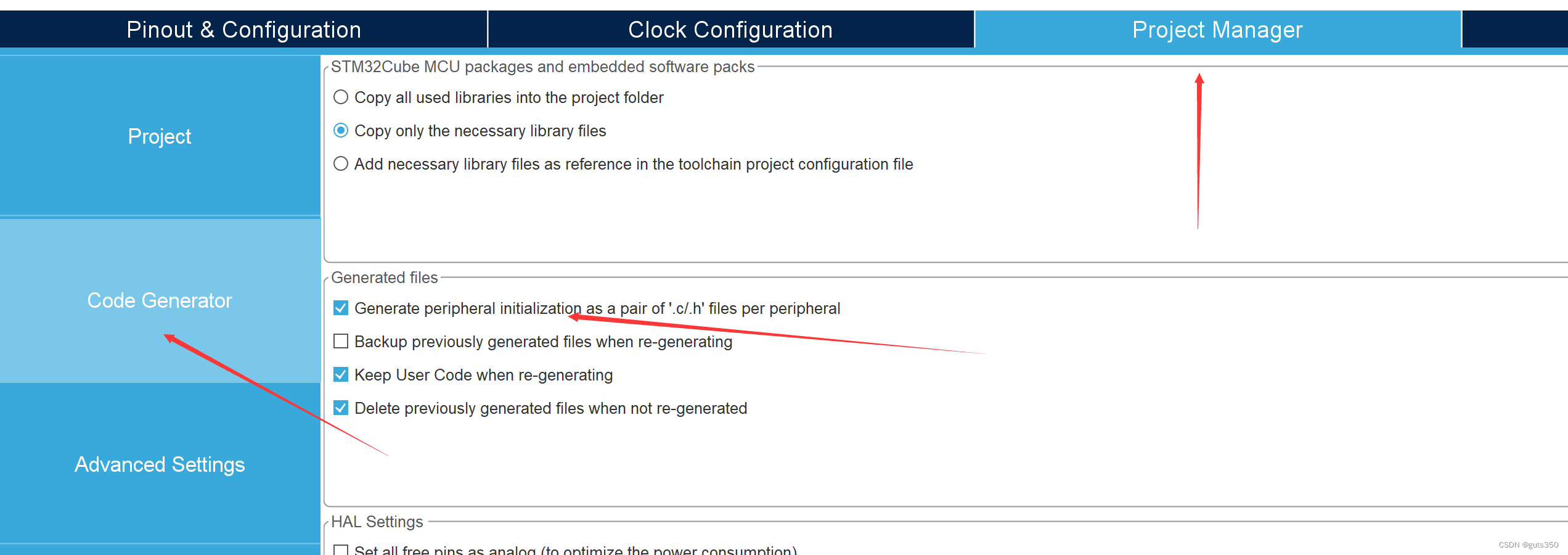
在project manager里面勾选上面的选项,可以把代码分开成c和h文件,看起来更清楚。
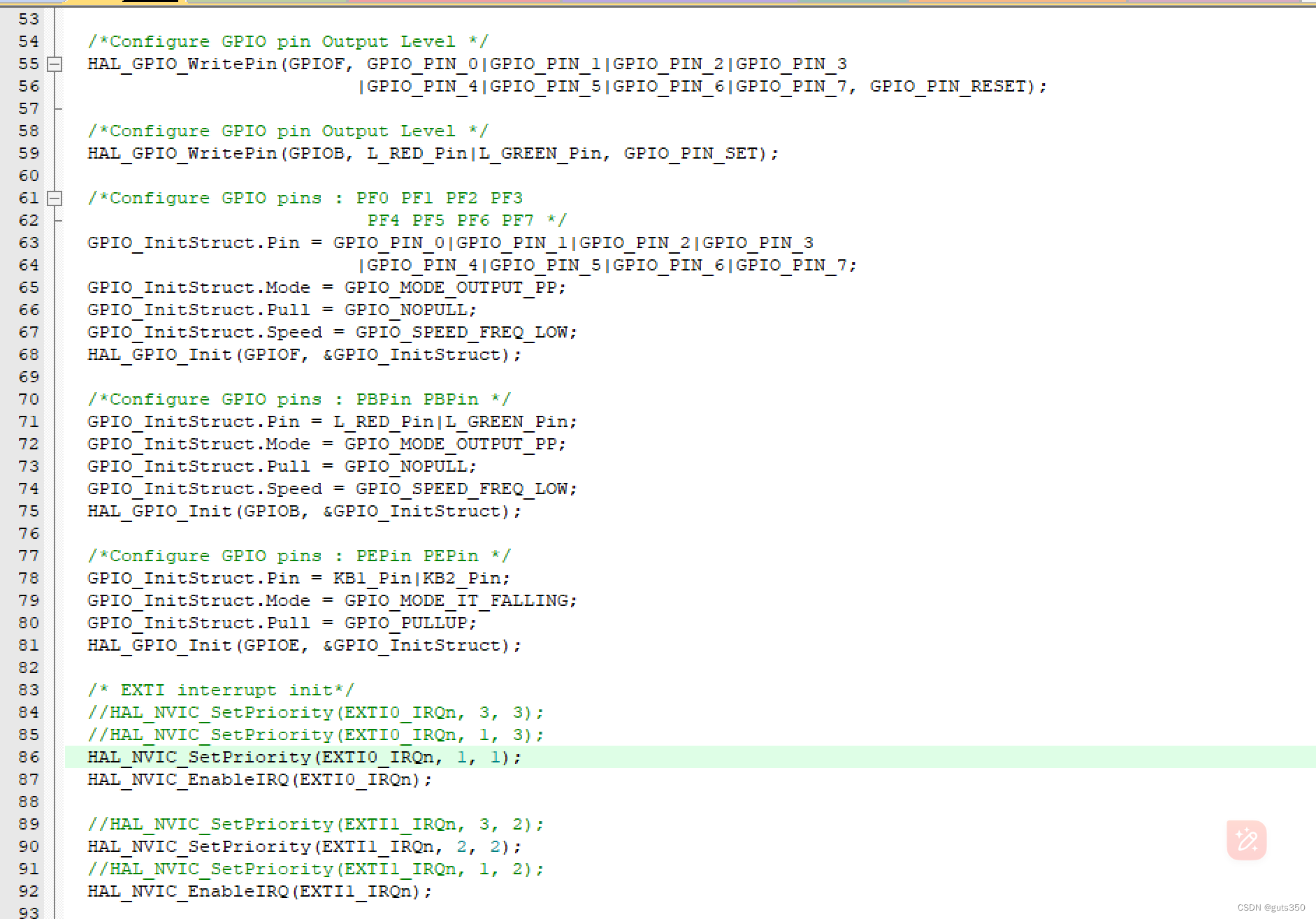
生成代码,可以进行查看:
先看gpio.c,setpriority配置外部中断的优先级,这里为了方便,前几个实验不重复建立工程,我直接在这里修改了代码,以修改优先级。这个函数的参数先是抢占,然后是响应。
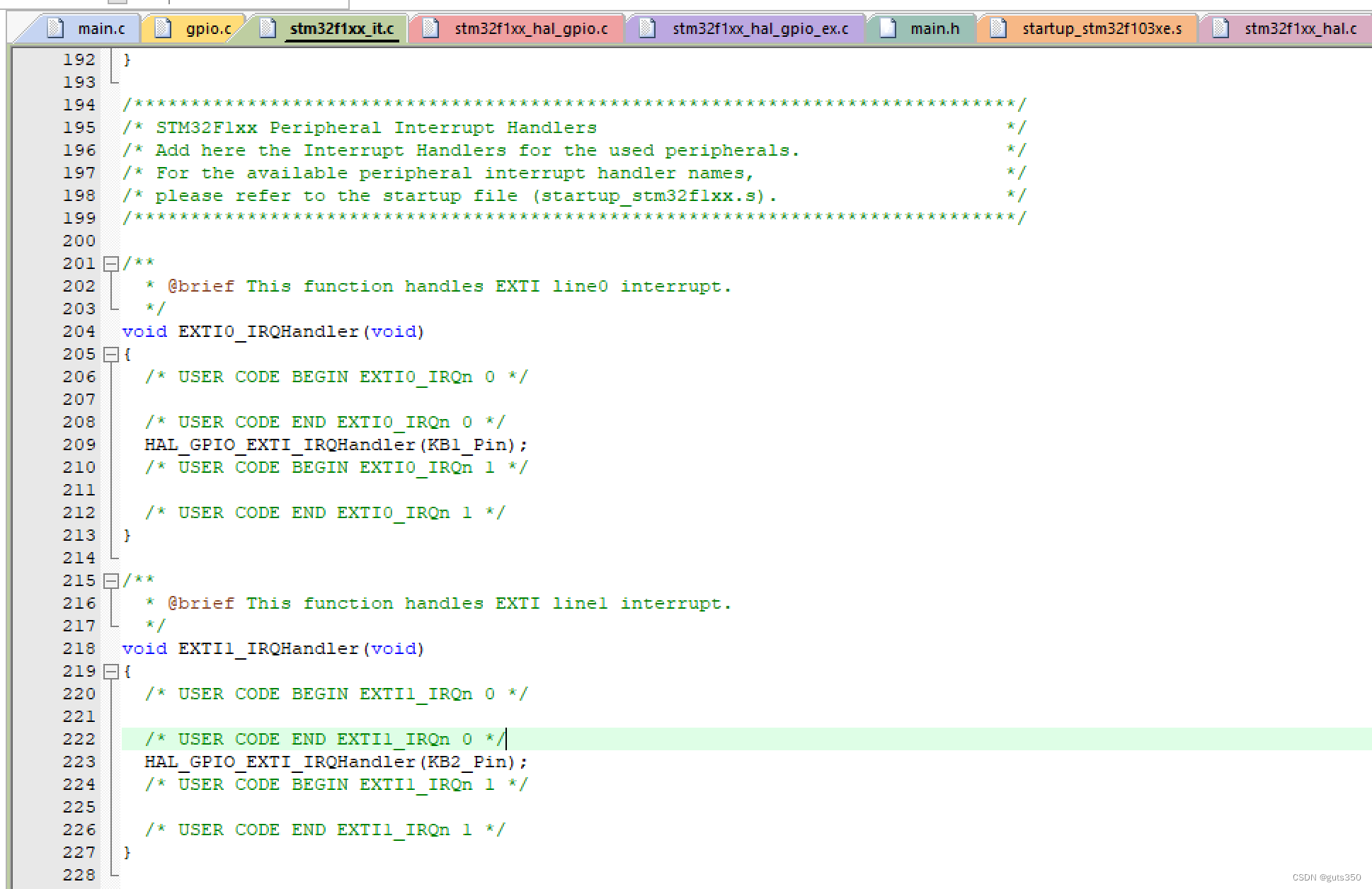
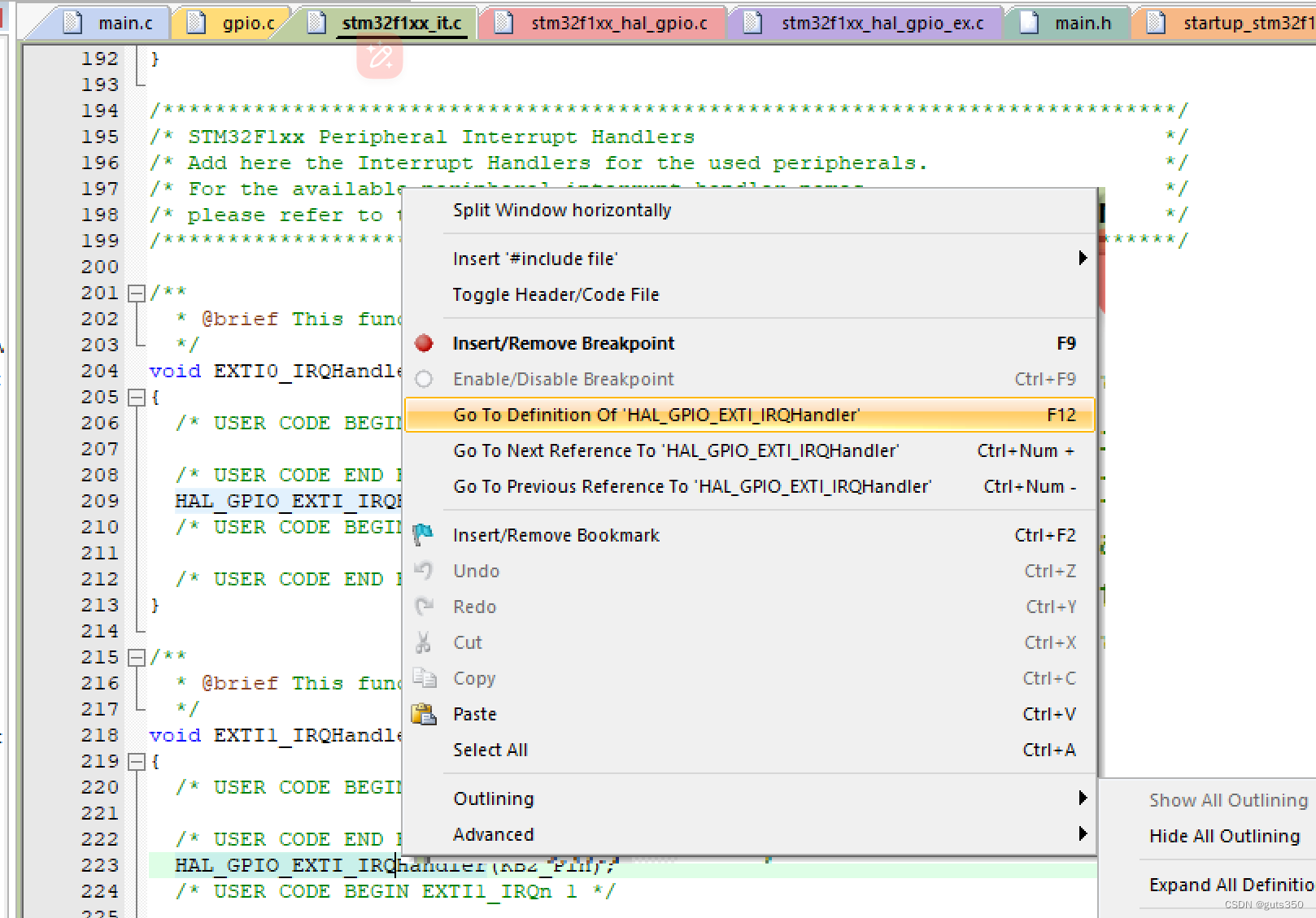
stm32f1xx_it.c里两个外部中断线的中断处理函数:
 查看他们都调用的这个函数:
查看他们都调用的这个函数:
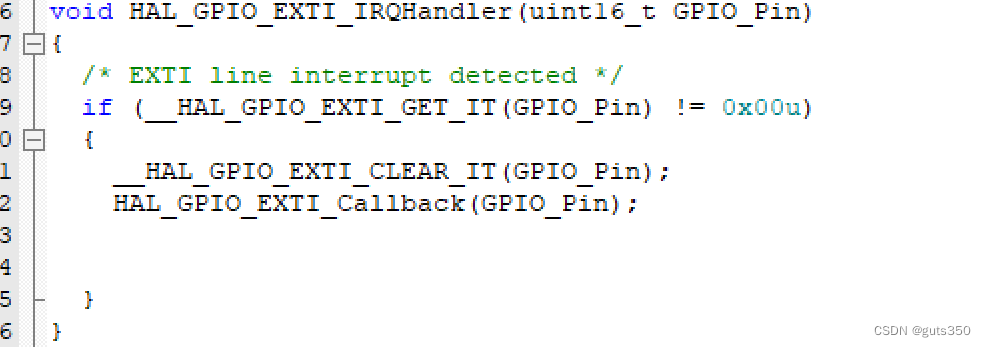
在这个函数里面,先确定这个中断是否被挂起,挂起就清除标志位,调用回调函数,这个回调函数是我们需要自己重写,实现自己的功能的函数。
可以在main.c里面重写:
根据不同的引脚来判断是哪个中断,做不同的处理:
void Light_TOGGLE(GPIO_Pin)
{HAL_GPIO_WritePin(GPIOB,GPIO_Pin,0);for(int k=0;k<2400000;k++);HAL_GPIO_WritePin(GPIOB,GPIO_Pin,1);for(int k=0;k<2400000;k++);
}void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{//HAL_Delay(10);switch(GPIO_Pin){case KB1_Pin:for(int i=0;i<5;i++) Light_TOGGLE(L_RED_Pin);break;//if(HAL_GPIO_ReadPin(KB1_GPIO_Port,KB1_Pin)==0){}case KB2_Pin:for(int i=0;i<5;i++) Light_TOGGLE(L_GREEN_Pin);break;// if(HAL_GPIO_ReadPin(KB2_GPIO_Port,KB2_Pin)==0){}}}这里有个非常容易出错的地方,花了很久来排查。
在注释掉的地方,我是用来按键消抖的,思路是先延时一下,然后再确认按键是否为低电平,为低电平才做操作,这是很常见的一种消抖做法。但是,中断操作里面,灯的闪烁本身时间就很长了,处理完中断程序之后这个按键的抖动已经停止了,根本不用再消抖了。
这样导致做两个相同抢占优先级的按键中断实验的时候,比如第二个实验抢占都为3的时候,我先按KB1,在KB1对应的红灯闪烁时按下KB2,不会打断当前的中断,这是对的,但是当前的红灯闪烁五次,中断执行完毕后,就看不到绿灯闪烁了。但是按道理,绿灯中断应该排队在后面,红灯闪烁完他应该闪烁绿灯的。而问题就在这里,灯的闪烁本身时间就很长了,当你执行完红灯的中断之后,KB2的抖动都消失了,虽然它执行了KB2的中断程序,但是这个if判断为真时才执行灯闪烁的操作:
if(HAL_GPIO_ReadPin(KB2_GPIO_Port,KB2_Pin)==0){}此时KB2已经恢复成没被按下的样子,那么他肯定不会做绿灯闪烁的操作了。去除掉这个消抖的部分,就会看到绿灯排在后面闪烁了。
另外还有一个需要注意的地方,就是这样写,会发现红灯中断会执行两次,也就是,闪烁10次,
这里就需要修改之前所看到的调用回调函数的HAL_GPIO_EXTI_IRQHandler的内部,在这里面它先清掉标志位,再调用回调函数;这会导致按键的抖动又重新把标志位置位,又触发中断,于是需要调换一下两个语句的位置,也就是:
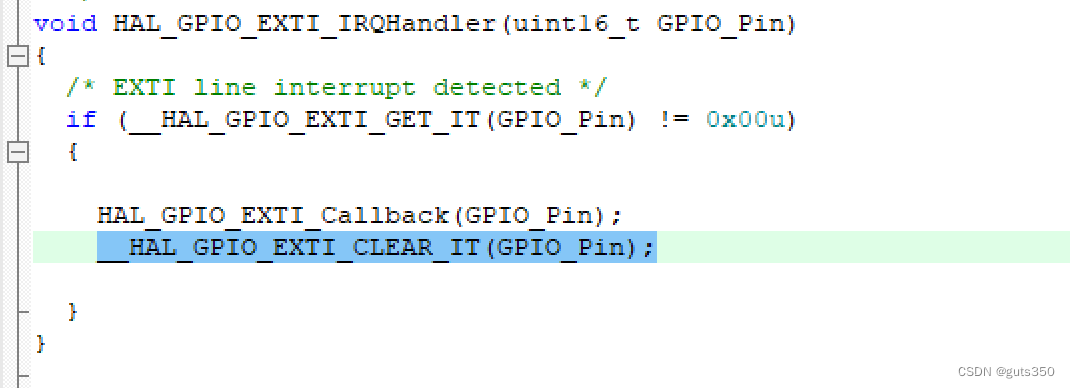
先做完处理再清除标志位,这样按键抖动就不会影响了。所以,涉及到按键的外部中断需要特别处理这里的顺序,另外用CubeMX重新生成代码后,这里会恢复成原来的样子,要记得改。
如果还不明白,可以看下面视频的7.2节,
【【7.2】外部中断示例EXTI方式检测按键——Kevin带你读《STM32Cube高效开发教程基础篇》】 https://www.bilibili.com/video/BV1m8411L7eR/?share_source=copy_web&vd_source=9332b8fc5ea8d349a54c3989f6189fd3
再说一下第六个实验的电机(蜂鸣器前面实验已做过,不再赘述):
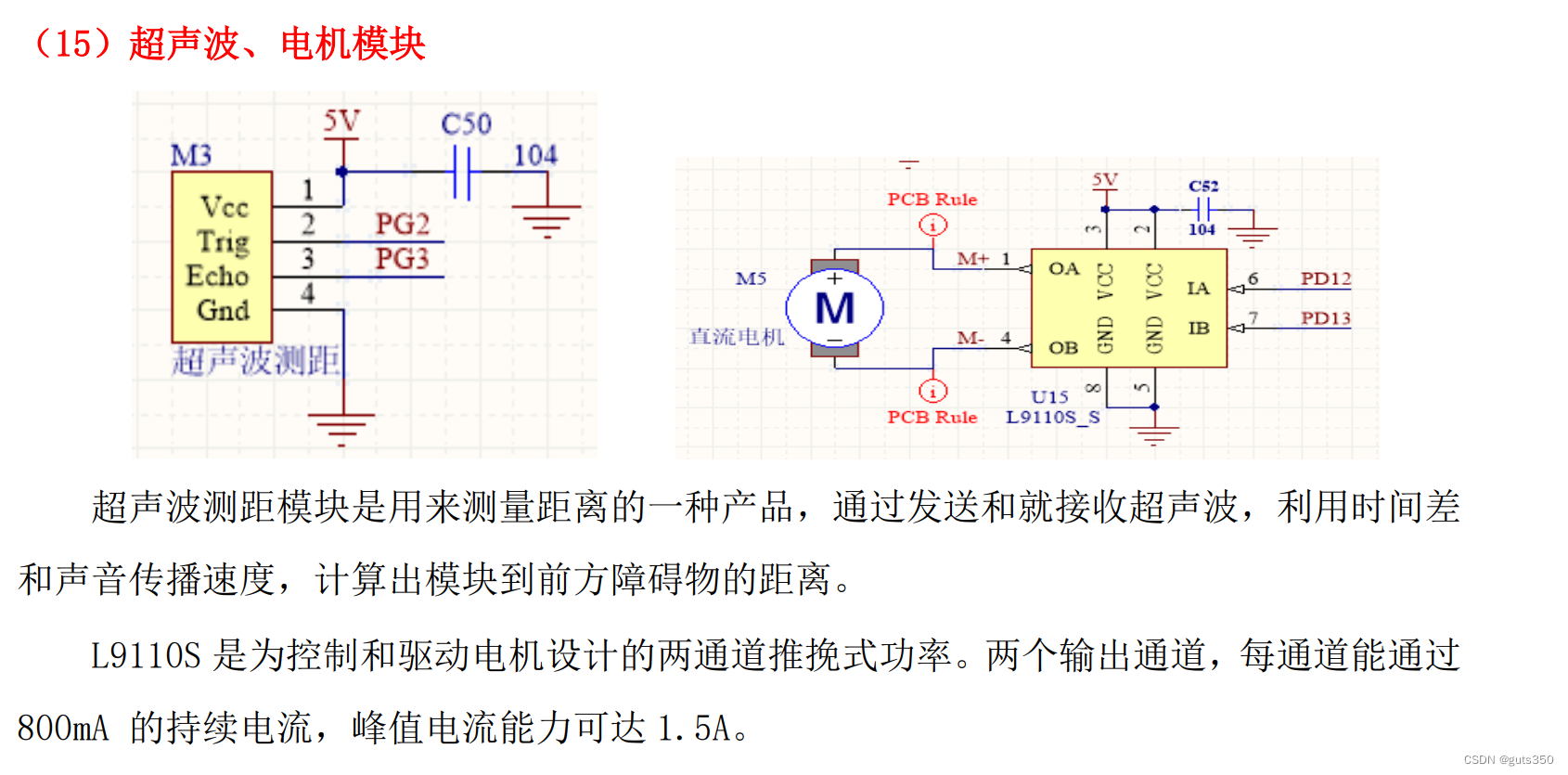
这个电机只要在电机两端,IA和IB加上不相同的电平,就能实现旋转,10或01,它们对应的旋转方向不同。
比如(先旋转一会儿再恢复静止):
void Rotate_Machine()
{HAL_GPIO_WritePin(GPIOD,GPIO_PIN_13,1);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_12,0);for(int k=0;k<5000000;k++);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_13,0);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_12,0);
}
这篇关于【stm32】swjtu西南交大嵌入式实验三 外部中断实验:按键中断的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!