本文主要是介绍Window + Ubuntu 双系统无Ubuntu Bios 启动项,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 安装硬盘位置不重要!!!(但是我安装在了第二张HDD)
- 问题是多盘分位置会导致磁盘主分区变成了简单卷
- Bios Ubuntu 启动项修复
- 参考
- Ubuntu安装U盘进入Try Ubuntu
- 使用Terminal
- 修复完提示Disable Secure Boot
- 进入Terminal 然后重启Disable Secure Boot
- 恢复Secure Boot
安装硬盘位置不重要!!!(但是我安装在了第二张HDD)
可以和Windows在同一硬盘。安装不同盘都无启动项!
问题是多盘分位置会导致磁盘主分区变成了简单卷
简单卷无法安装Ubuntu!!!
我没有解决简单卷到主分区的转换问题,只能全部格式化重新分盘/(ㄒoㄒ)/~~
Bios Ubuntu 启动项修复
版本Ubuntu 22.04
参考
ubuntu与windows双系统的启动项丢失
Ubuntu安装U盘进入Try Ubuntu

使用Terminal
1. sudo su
2. sudo add-apt-repository ppa:yannubuntu/boot-repair
3. apt-get update
4. apt-get install boot-repair
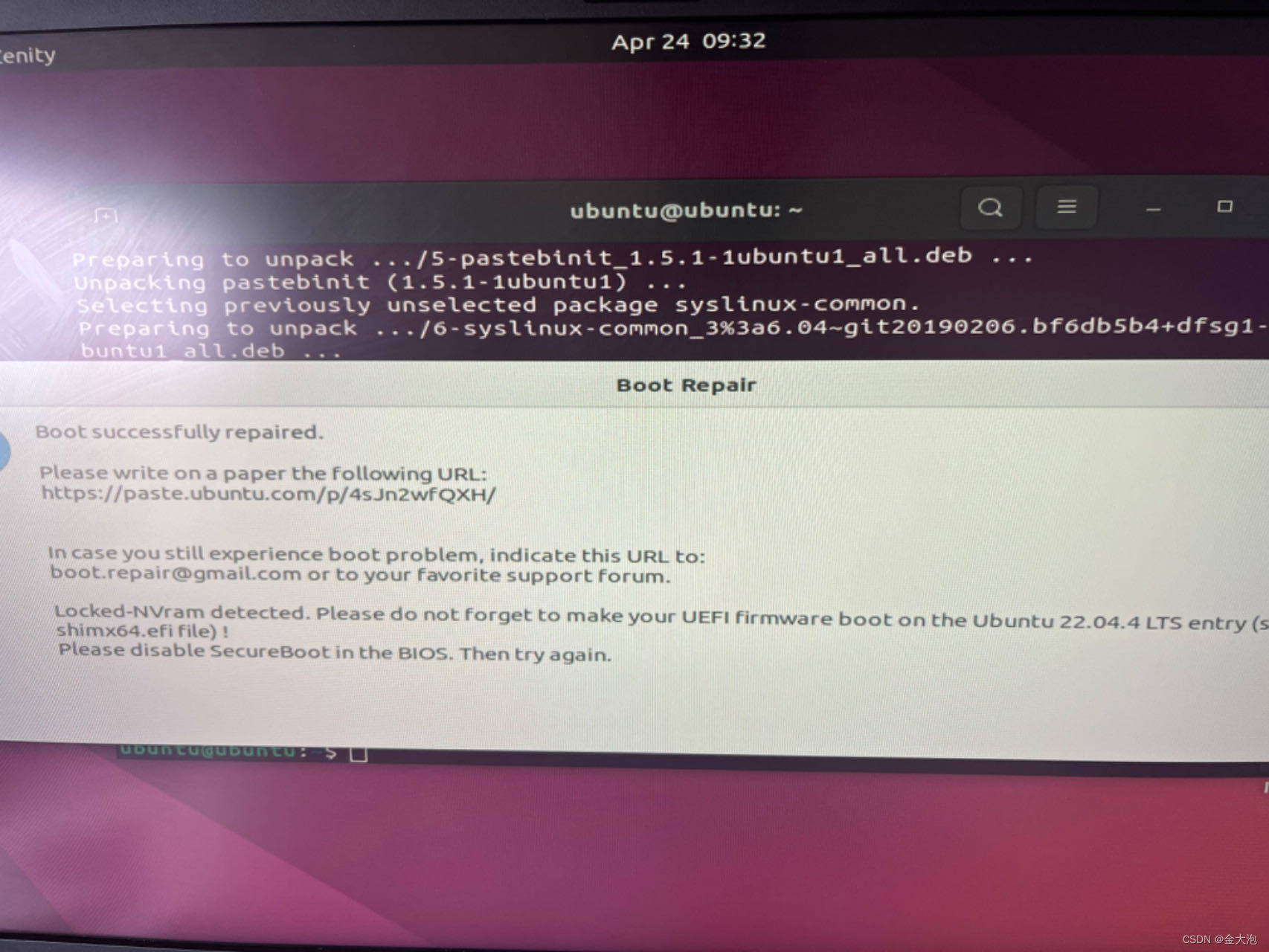
进行修复

修复完提示Disable Secure Boot
进入Terminal 然后重启Disable Secure Boot
- 打开终端(Ctrl + Alt + T),执行
sudo mokutil --disable-validation。
-
输入一个8到16位数的临时密码。(例如,12345678,我们稍后会使用这个密码)
再次输入相同的密码以确认。 -
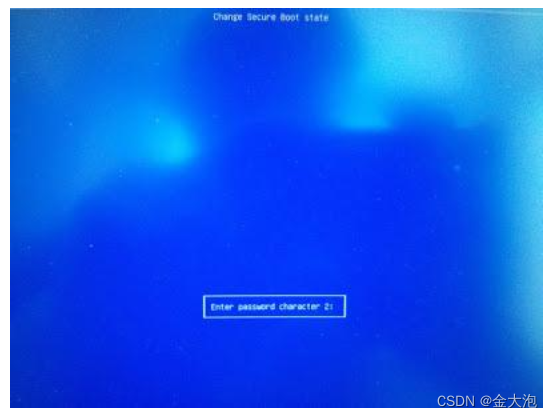
重新启动系统,在看到蓝屏幕(MOK管理)时按下任意键。

4. 选择Change Secure Boot state

输入您在第2步中选择的密码,然后按Enter键。
选择Yes以在shim-signed中禁用安全启动。
按Enter键完成整个过程。
恢复Secure Boot
To re-enable Secure Boot validation in shim, simply run
sudo mokutil --enable-validation.
这篇关于Window + Ubuntu 双系统无Ubuntu Bios 启动项的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









