本文主要是介绍C语言数字图像处理---2.5图像频域滤波,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
上一小节我们介绍了图像频域变换,本小节将以此为基础,介绍图像频域滤波的相关内容,包含常见高通/低通/带通/带阻/方向滤波等频域滤波方法,同时以C语言编码实现,帮助初学者理解和掌握如何进行图像的频域滤波。
[定义与算法]
图像频域滤波是指将图像由空间域经过傅里叶变换转换到频率域,对图像的频谱图进行滤波,然后再通过傅里叶逆变换将滤波后的图像信息还原到空间域的滤波方法。它可以解决一些在空域特征较弱,但在频域特征明显的图像信号处理问题。频域滤波同样也包含高通滤波、低通滤波、带通滤波以及方向滤波等等内容。作为初学者,我们要掌握的是频域滤波的方法,方可举一反三和学以致用。
频域滤波的一般方法流程如下图Fig.1所示:
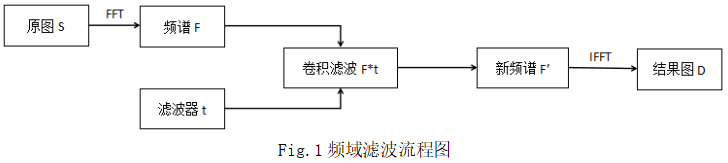
对于一幅图像S,经过傅里叶变换FFT得到频谱图F,对F使用滤波器t进行滤波,也就是相乘,得到新的频谱图F’,然后对其进行傅里叶逆变换IFFT,得到结果图D。对于滤波器t的选择,根据不同的种类会得到不同的滤波效果,下面我们介绍几种常见的滤波器。
低通滤波器:
这篇关于C语言数字图像处理---2.5图像频域滤波的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






