本文主要是介绍python+opencv3图像处理学习记录,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 概括
- 第一章 简单的图像处理方式
- 1.图片、视频资源读取
- 2.色彩空间的转换、对比度、亮度调整
- 3.像素运算
- 4.泛洪填充 ROI
- 5.模糊操作
- 6. 直方图
- 7.模板匹配
- 8.边缘提取检测
- 9.直线检测
- 10.圆检测
- 11.对象测量
- 12.膨胀腐蚀
- 13.开闭操作
- 14.分水岭算法
概括
本文主要用于记录图像处理学习过程中的笔记与疑问,使用pycharm IDE python语言和opencv工具。
第一章 简单的图像处理方式
1.图片、视频资源读取
图片读取
import cv2 as cv
import numpy as np
src = cv.imread("C:/Users/H/Desktop/13d98c6f3117f0a19b9d40c44ac7a30f.jpg")
cv.imshow("src",src)
cv.waitKey(0)
cv.destroyAllWindows()
运行结果:
视频读取:
import cv2 as cv
import numpy as np
def video_demo():capture = cv.VideoCapture(0)# 0代表开启摄像头获取视频,可使用视频路径代替while True:ret, frame = capture.read()if cv.waitKey(100) == 27:breakcv.imshow("frame", frame)
video_demo()
cv.waitKey(0)
cv.destroyAllWindows()
视频读取的处理需要截取每一帧图片对图片进行处理后组合展示,呈现视频效果。
2.色彩空间的转换、对比度、亮度调整
HSV图像空间 HSV色彩空间(Hue-色调、Saturation-饱和度、Value-值)将亮度从色彩中分解出来,在图像增强算法中用途很广,在很多图像处理任务中,经常将图像从RGB色彩空间转换到了HSV色彩空间,以便更好地感知图像颜色,利用HSV分量从图像中提取感兴趣的区域。
YUV YCrCb该颜色空间主要是基于人眼对亮度比对色度敏感这一特性而来的,将颜色分量和亮度分量分离开来。
HSV图像空间表 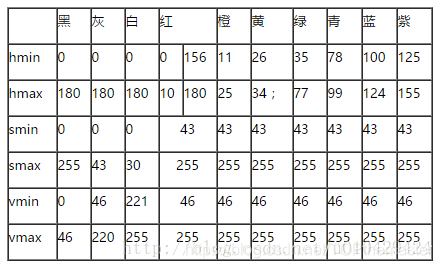
# HSV图像色彩空间转换
def color_space_demo(image):gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)cv.imshow("gray", gray)hsv = cv.cvtColor(image, cv.COLOR_RGB2HSV)cv.imshow("hsv", hsv)yuv = cv.cvtColor(image, cv.COLOR_RGB2YUV)cv.imshow("yuv", yuv)Ycrcb = cv.cvtColor(image, cv.COLOR_BGR2YCrCb)cv.imshow("Ycrcb", Ycrcb)# 调整图像的亮度与对比度,本函数中c代表对比度,b代表亮度
def contrast_brightness_demo(image, c, b):h, w, ch = image.shapeblank = np.zeros([h, w, ch], image.dtype)dst = cv.addWeighted(image, c, blank, 1 - c, b)cv.imshow("con-bri-demo", dst)3.像素运算
图像的像素运算:加减乘除、均值 、方差。
import cv2 as cv
import numpy as np# 像素相加
def add_demo(m1, m2):dst = cv.add(m1, m2)cv.imshow("add_demo", dst) # 显示图片# 像素相减
def subtract_demo(m1, m2):dst = cv.subtract(m1, m2)cv.imshow("subtract_demo", dst)# 像素相除
def divide_demo(m1, m2):dst = cv.divide(m1, m2)cv.imshow("divide_demo", dst)# 像素相乘
def multiply_demo(m1, m2):dst = cv.multiply(m1, m2)cv.imshow("multiply_demo", dst)# 其他操作
def others(m1, m2):M1, dev1 = cv.meanStdDev(m1) # M1均值,dev1方差M2, dev2 = cv.meanStdDev(m2) # M2均值,dev2方差h, w = m1.shape[:2]print(M1) # 打印均值M1print(M2) # 打印均值M2print(dev1) # 打印方差print(dev2) # 打印方差img = np.zeros([h, w], np.uint8) # 产生一个所有像素都为0的图片m, dev = cv.meanStdDev(img) # 获取该图片的均值和方差print(m) # 打印均值:[[0.]]print(dev) # 打印方差:[[0.]]
# 说明:可通过均值和方差判断图片中是否有有用信息src1 = cv.imread("C:/Users/H/Desktop/92e8823ecc933f05edbfe5f9186e42c2.jpg")
src2 = cv.imread("C:/Users/H/Desktop/13d98c6f3117f0a19b9d40c44ac7a30f.jpg")
print(src1.shape)
print(src2.shape)
cv.namedWindow("input image1", cv.WINDOW_AUTOSIZE) # 设置图片尺寸,自动
cv.imshow("input image1", src1) # 显示图像
cv.namedWindow("input image2", cv.WINDOW_AUTOSIZE) # 设置图片尺寸,自动
cv.imshow("input image2", src2) # 显示图像
add_demo(src1, src2)
subtract_demo(src1, src2)
divide_demo(src1, src2)
multiply_demo(src1, src2)
others(src1, src2)
cv.waitKey(0)
cv.destroyAllWindows()4.泛洪填充 ROI
ROI 是指对图像提取出有用的部分,利用mask(掩模)技术提取纯色背景图像ROI区域中的人和物,并将提取出来的人或物添加在其他图像上。
如下将利用该方式实现对某些色彩的提取并得到想要的部分
import cv2 as cv
import numpy as np
def getRoi(image):hsv = cv.cvtColor(image, cv.COLOR_BGR2HSV) # 转换成hsv色彩风格cv.imshow('hsv', hsv)mask = cv.inRange(hsv, (26, 43, 46), (155, 255, 255)) # 利用inRange产生maskmask = cv.bitwise_not(mask) #取反dst = cv.bitwise_and(image, image, mask=mask)print(dst.shape)cv.imshow('mask1', mask)cv.imshow('dst', dst)src = cv.imread("C:/Users/H/Desktop/13d98c6f3117f0a19b9d40c44ac7a30f.jpg")
cv.imshow('src', src)
getRoi(src)cv.waitKey(0)
cv.destroyAllWindows()运行结果:

5.模糊操作
模糊分为均值模糊,中值模糊,高斯模糊,双边模糊,
如下是中值模糊,均值模糊和锐化操作的代码实现:
def custom_blur_demo(image):""" # 均值模糊 去噪 随机噪声# 在y方向模糊15个像素dst=cv.blur(image,(1,15))# 在x方向模糊15个像素dst = cv.blur(image, (15, 1))# 中值模糊 去噪 椒盐噪声dst= cv.medianBlur(image,5)""" #kernel=np.ones([5,5],np.float32)/25#锐化操作 一般算子和为0或者1 0主要用于提取边缘 1实现图像锐化kernel = np.array([[0, -5, 0], [-5, 20, -5], [0, -5, 0]], np.float32)dst=cv.filter2D(image,-1,kernel=kernel)cv.imshow("dst",dst)
高斯模糊:当图像出现高斯噪声时,很不方便去提取出轮廓以及层次,如下所示:
import cv2 as cv
import numpy as np
def clamp(s):if s>255:return 255if s< 0:return 0else:return s
def kernel_get(image):kernel = np.array([[0, -5, 0], [-5, 20, -5], [0, -5, 0]], np.float32)dst = cv.filter2D(image, -1, kernel=kernel)return dst
def gaussian_noise(image):h,w,c=image.shapefor row in range(h):for col in range(w):s=np.random.normal(0,20,3)b=image[row,col,0]g=image[row,col,1]r=image[row,col,2]image[row,col,0] = clamp(b+s[0])image[row, col, 1] = clamp(g + s[1])image[row, col, 2] = clamp(r + s[2])cv.imshow("noise add",image)
src = cv.imread("C:/Users/H/Desktop/13d98c6f3117f0a19b9d40c44ac7a30f.jpg")
cv.imshow("src",src)
cv.imshow("dst1",kernel_get(src))
gaussian_noise(src)
cv.imshow("dst2",kernel_get(src))
cv.waitKey(0)
cv.destroyAllWindows()
结果展示:

可以看出添加高斯噪声之后,图像提取边缘变得及其困难
然后分别对原图和添加噪声的图进行高斯模糊过滤:
import cv2 as cv
import numpy as np
def clamp(s):if s>255:return 255if s< 0:return 0else:return s
def kernel_get(image):kernel = np.array([[0, -5, 0], [-5, 21, -5], [0, -5, 0]], np.float32)dst = cv.filter2D(image, -1, kernel=kernel)return dst
def gaussian_noise(image):h,w,c=image.shapefor row in range(h):for col in range(w):s=np.random.normal(0,20,3)b=image[row,col,0]g=image[row,col,1]r=image[row,col,2]image[row,col,0] = clamp(b+s[0])image[row, col, 1] = clamp(g + s[1])image[row, col, 2] = clamp(r + s[2])cv.imshow("noise add",image)
src = cv.imread("C:/Users/H/Desktop/13d98c6f3117f0a19b9d40c44ac7a30f.jpg")
cv.imshow("src",src)
dst=cv.GaussianBlur(src,(5,5),0)
cv.imshow("dst1",dst)
gaussian_noise(src)
dst=cv.GaussianBlur(src,(5,5),0)
cv.imshow("dst2",dst)
cv.waitKey(0)
cv.destroyAllWindows()

可以看出相对比之下,噪声对于高斯模糊的影响不是很大,可以较好地去除。
边缘模糊(边缘保留滤波)EPF 该方式会在像素差别较大的区域中不进行模糊操作,从而实现在整体轮廓不变的前提下进行模糊操作,常用于去除斑点,美白图像中。
在opencv中提供了两个API ,一个类似于高斯模糊的磨皮效果,保留原有边缘,另一个则会对像素周围权值进行升高或者降低,从而将边缘明显化。
def bi_demo(image):dst=cv.bilateralFilter(image,0,100,15)return dst
def shift_demo(image):dst=cv.pyrMeanShiftFiltering(image,10,50)return dst
 如图所示可以清晰看到物体轮廓并没有发生改变。
如图所示可以清晰看到物体轮廓并没有发生改变。

如图所示可以看出在前者基础上提高了边缘的展现。
6. 直方图
直方图均衡化,常用于对比度的调整。
#局部直方图均衡化 灰度
def clahe_demo(image):gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)clahe = cv.createCLAHE(clipLimit=5.0, tileGridSize=(8, 8))dst = clahe.apply(gray)dst1=cv.cvtColor(dst,cv.COLOR_GRAY2BGR)cv.imshow("clahe", dst1)
#彩色空间三通道
def clahe2(iamge):b, g, r = cv.split(iamge)clahe = cv.createCLAHE(clipLimit=2.0, tileGridSize=(10, 10))dst_b = clahe.apply(b)dst_g = clahe.apply(g)dst_r = clahe.apply(r)merged = cv.merge([dst_b,dst_g,dst_r])cv.imshow("clahe", merged)
src = cv.imread("C:/Users/H/Desktop/13d98c6f3117f0a19b9d40c44ac7a30f.jpg")
cv.imshow("src",src)
clahe2(src)
cv.waitKey(0)
cv.destroyAllWindows()
运行结果

直方图比较:
巴士距离越小,图像越相关,相关性越大。卡方越小
# 直方图比较
def create_rgb_hist(image):h, w, c = image.shapergbHist = np.zeros([16*16*16, 1], np.float32)bsize = 256/16for row in range(h):for col in range(w):b = image[row, col, 0]g = image[row, col, 1]r = image[row, col, 2]index = np.int((b/bsize)/16*16 + np.int(g/bsize)*16 + np.int(r/bsize))rgbHist[np.int(index), 0] = rgbHist[np.int(index), 0] + 1return rgbHistdef hist_compare(image1, image2):hist1 = create_rgb_hist(image1)hist2 = create_rgb_hist(image2)match1 = cv.compareHist(hist1, hist2, cv.HISTCMP_BHATTACHARYYA)match2 = cv.compareHist(hist1, hist2, cv.HISTCMP_CORREL)match3 = cv.compareHist(hist1, hist2, cv.HISTCMP_CHISQR)print("巴氏距离: %s, 相关性: %s, 卡方: %s"%(match1, match2, match3))cv.imshow("image1", image1)cv.imshow("image2", image2)
7.模板匹配
这部分据说用得不多,没有做实验,把网上扒的代码先放着存一下。
#opencv模板匹配----单目标匹配
import cv2
#读取目标图片
target = cv2.imread("target.jpg")
#读取模板图片
template = cv2.imread("template.jpg")
#获得模板图片的高宽尺寸
theight, twidth = template.shape[:2]
#执行模板匹配,采用的匹配方式cv2.TM_SQDIFF_NORMED
result = cv2.matchTemplate(target,template,cv2.TM_SQDIFF_NORMED)
#归一化处理
cv2.normalize( result, result, 0, 1, cv2.NORM_MINMAX, -1 )
#寻找矩阵(一维数组当做向量,用Mat定义)中的最大值和最小值的匹配结果及其位置
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(result)
#匹配值转换为字符串
#对于cv2.TM_SQDIFF及cv2.TM_SQDIFF_NORMED方法min_val越趋近与0匹配度越好,匹配位置取min_loc
#对于其他方法max_val越趋近于1匹配度越好,匹配位置取max_loc
strmin_val = str(min_val)
#绘制矩形边框,将匹配区域标注出来
#min_loc:矩形定点
#(min_loc[0]+twidth,min_loc[1]+theight):矩形的宽高
#(0,0,225):矩形的边框颜色;2:矩形边框宽度
cv2.rectangle(target,min_loc,(min_loc[0]+twidth,min_loc[1]+theight),(0,0,225),2)
#显示结果,并将匹配值显示在标题栏上
cv2.imshow("MatchResult----MatchingValue="+strmin_val,target)
cv2.waitKey()
cv2.destroyAllWindows()8.边缘提取检测
Canny方式:
Canny边缘检测器是一种被广泛使用的算法,并被认为是边缘检测最优的算法,该方法使用了比高斯差分算法更复杂的技巧,如多向灰度梯度和滞后阈值化
import os
import cv2
img = cv2.imread('1.jpg', 0)#转化为灰度图
img_color = img
blur = cv2.GaussianBlur(img, (3, 3), 0) # 用高斯滤波处理原图像降噪
canny = cv2.Canny(blur, 50, 150) # 50是最小阈值,150是最大阈值
cv2.namedWindow("canny",0);#可调大小
cv2.namedWindow("1",0);#可调大小
cv2.imshow('1', img)
cv2.imshow('canny', canny)
cv2.waitKey(0)
cv2.destroyAllWindows()结果:

Sobel方式:
Sobel边缘检测算法比较简单,实际应用中效率比canny边缘检测效率要高,但是边缘不如Canny检测的准确,Sobel算子是高斯平滑与微分操作的结合体,所以其抗噪声能力很强,用途较多。尤其是效率要求较高的彩色图像。
# Sobel边缘检测算子
import os
import cv2
img = cv2.imread('1.jpg', 0)#转化为灰度图
x = cv2.Sobel(img, cv2.CV_16S, 1, 0)
y = cv2.Sobel(img, cv2.CV_16S, 0, 1)
# cv2.convertScaleAbs(src[, dst[, alpha[, beta]]])
# 可选参数alpha是伸缩系数,beta是加到结果上的一个值,结果返回uint类型的图像
Scale_absX = cv2.convertScaleAbs(x) # convert 转换 scale 缩放
Scale_absY = cv2.convertScaleAbs(y)
result = cv2.addWeighted(Scale_absX, 0.5, Scale_absY, 0.5, 0)
cv2.namedWindow("result",0);#可调大小
cv2.namedWindow("1",0);#可调大小
cv2.imshow('1', img)
cv2.imshow('result', result)
cv2.waitKey(0)
cv2.destroyAllWindows()结果:

9.直线检测
import cv2
import numpy as npimg = cv2.imread("C:/Users/H/Desktop/000035.jpg")
height = img.shape[0] # 高度
width = img.shape[1] # 宽度
cut_img = imggray = cv2.cvtColor(cut_img, cv2.COLOR_BGR2GRAY)
cv2.waitKey(0)
edges = cv2.Canny(gray, 50, 150, apertureSize=5)lines = cv2.HoughLines(edges, 1, np.pi / 180, 100)
result = cut_img.copy()
minLineLength = 5 # height/32
maxLineGap = 3 # height/40
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, 80, minLineLength, maxLineGap)for x1, y1, x2, y2 in lines[0]:cv2.line(result, (x1, y1), (x2, y2), (0, 255, 0), 2)cv2.imshow('result', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果:

10.圆检测
#霍夫圆检测
import cv2 as cv
import numpy as npdef detect_circles_demo(image):dst = cv.pyrMeanShiftFiltering(image, 8, 80) #边缘保留滤波EPFcimage = cv.cvtColor(dst, cv.COLOR_RGB2GRAY)cv.imshow("cimage", cimage)circles = cv.HoughCircles(cimage, cv.HOUGH_GRADIENT, 1, 20, param1=50, param2=30, minRadius=0, maxRadius=0)circles = np.uint16(np.around(circles)) #把circles包含的圆心和半径的值变成整数for i in circles[0, : ]:cv.circle(image, (i[0], i[1]), i[2], (0, 0, 255), 2) #画圆cv.circle(image, (i[0], i[1]), 2, (0, 0, 255), 2) #画圆心cv.imshow("circles", image)src = cv.imread('C:/Users/H/Desktop/92e8823ecc933f05edbfe5f9186e42c2.jpg')
cv.namedWindow('input_image', cv.WINDOW_NORMAL) #设置为WINDOW_NORMAL可以任意缩放
cv.imshow('input_image', src)
detect_circles_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
结果:

11.对象测量
def measure_demo(image):gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)ret, thresh = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)print("threshold value", ret)cv.imshow("binary", thresh)contours, hierarchy = cv.findContours(thresh, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)for i, contour in enumerate(contours): # 遍历全部轮廓area = cv.contourArea(contour)# cv2.boundingRect返回四个参数(x,y)为矩形左上角的坐标,(w,h)是矩形的宽和高x, y, w, h = cv.boundingRect(contour) # 外接矩形大小rate = min(w, h) / max(w, h) # 宽高比cv.rectangle(image, (x, y), (x+w, y+h), (0, 0, 255), 2) # 外接矩形print("contour area ", area)cv.imshow("measure contours", image)结果:

12.膨胀腐蚀
膨胀函数
cv2.dilate(img,kernel,iterations)
其中:
第一个参数:img指需要腐蚀的图
第二个参数:kernel指腐蚀操作的内核,默认是一个简单的3X3矩阵,我们也可以利用getStructuringElement()函数指明它的形状
第三个参数:iterations指的是腐蚀次数,省略是默认为1
import cv2 as cvdef dilate_demo(image):gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU)cv.imshow("binary", binary)kernel = cv.getStructuringElement(cv.MORPH_RECT, (5, 5))dst = cv.dilate(binary, kernel)cv.imshow("dilate", dst)src = cv.imread("shufa.jpg")
cv.imshow("shufa", src)
# erode_demo(src)
dilate_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()结果:

膨胀操作会把二值化图像中白色区域不断扩大
腐蚀:
import cv2 as cvdef erode_demo(image):gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU)cv.imshow("binary", binary)kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3))dst = cv.erode(binary, kernel)cv.imshow("erode", dst)src = cv.imread("C:/Users/H/Desktop/13d98c6f3117f0a19b9d40c44ac7a30f.jpg")
cv.imshow("shufa", src)
# erode_demo(src)
erode_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
腐蚀操作会把二值化图像白色区域减少,从而实现消除一些白点干扰的目的。
13.开闭操作
开操作:图像形态学的重要操纵之一,基于膨胀与腐蚀操作组合形成的;主要是应用在二值图像分析中,灰度图像亦可
开操作 = 腐蚀+膨胀 ,输入图像 + 结构元素
作用:用来消除小物体、平滑较大物体的边界的同时并不明显改变其面积,提取水平或竖直的线
闭操作:图像形态学的重要操纵之一,基于膨胀与腐蚀操作组合形成的;主要是应用在二值图像分析中,灰度图像亦可
闭操作 = 膨胀+腐蚀 ,输入图像 + 结构元素
作用:用来填充物体内细小空洞、连接邻近物体、平滑其边界的同时并不明显改变其面积
import cv2 as cvimport cv2def open_demo(image):print(image.shape)gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU)binary = cv2.bitwise_not(binary)cv2.imshow("binary_open", binary)#通过修改核实现不同规格的开操作,或者横线竖线提取kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (15, 1))binary = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel)cv2.imshow("open result", binary)def close_demo(image):print(image.shape)gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU)cv2.imshow("binary_close", binary)kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))binary = cv2.morphologyEx(binary, cv2.MORPH_CLOSE, kernel)cv2.imshow("close result", binary)src = cv.imread("C:/Users/H/Desktop/111.png")
cv.imshow("src", src)
# erode_demo(src)
open_demo(src)cv.waitKey(0)
cv.destroyAllWindows()
开操作消除小物体,平滑大物体边界结果:

开操作提取竖线结果:

开操作提取横线结果:

闭操作填充细小空间结果:

14.分水岭算法
如果图像中的目标物体是连接在一起的,则分割起来会更困难,分水岭分割算法经常用于处理这类问题,通常会取得比较好的效果。分水岭分割算法把图像看成一幅“地形图”,其中亮度比较强的区域像素值较大,而比较暗的区域像素值较小,通过寻找“汇水盆地”和“分水岭界限”,对图像进行分割。

代码流程:
import cv2
import numpy as np# 分割连在一块的硬币
img = cv2.imread('C:/Users/H/Desktop/20190315155813439.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Otsu's二值化
ret, thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
cv2.imshow('thresh', thresh)
# noise removal
kernel = np.ones((3, 3), np.uint8)
#开运算 去除小物体影响 去除图像中的所有的白噪声
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations=2)
cv2.imshow('opening', opening)
#膨胀可以将对象的边界延伸到背景中去。这样由于边界区域被去处理,我们就可以知道那些区域肯定是前景,那些肯定是背景。
sure_bg = cv2.dilate(opening, kernel, iterations=3)
cv2.imshow('sure_bg', sure_bg)
# 距离变换分割出来
dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2, 5)
ret, sure_fg = cv2.threshold(dist_transform, 0.7 * dist_transform.max(), 255, 0)# 得到确定是硬币的区域和不确定的区域
sure_fg = np.uint8(sure_fg)
cv2.imshow('sure_fg', sure_fg)
unknown = cv2.subtract(sure_bg, sure_fg)
cv2.imshow('unknown', unknown)
# Marker labelling 标记背景为0
ret, markers = cv2.connectedComponents(sure_fg)# Add one to all labels so that sure background is not 0, but 1 背景标记为1
markers = markers + 1# Now, mark the region of unknown with zero 不确定位置标记为0
markers[unknown == 255] = 0markers = cv2.watershed(img, markers) #实施分水岭
img[markers == -1] = [255, 0, 0]cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果:
可以分别看到整个过程,图像二值化、开操作去除噪点、膨胀操作得到前景背景分割、距离变换分割确定硬币区域、用膨胀部分减去确定硬币部分得到未确定部分、标记进行分水岭操作。

这篇关于python+opencv3图像处理学习记录的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





