本文主要是介绍TQZC706开发板教程:在ZC706上运行ADRV9371(vivado2018.3),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
首先需要在github上下载两个文件,本例程用到的文件以及最终文件,我都会放在网盘里面,地址在本文的末尾,需要自行提取
在github上搜索hdl选择第一个-->选择版本-->我所使用的vivado是2018.3版本,所以这里我下载的是hdl_2019_r1-->在附录中下载资源-->下载对应版本的No-Os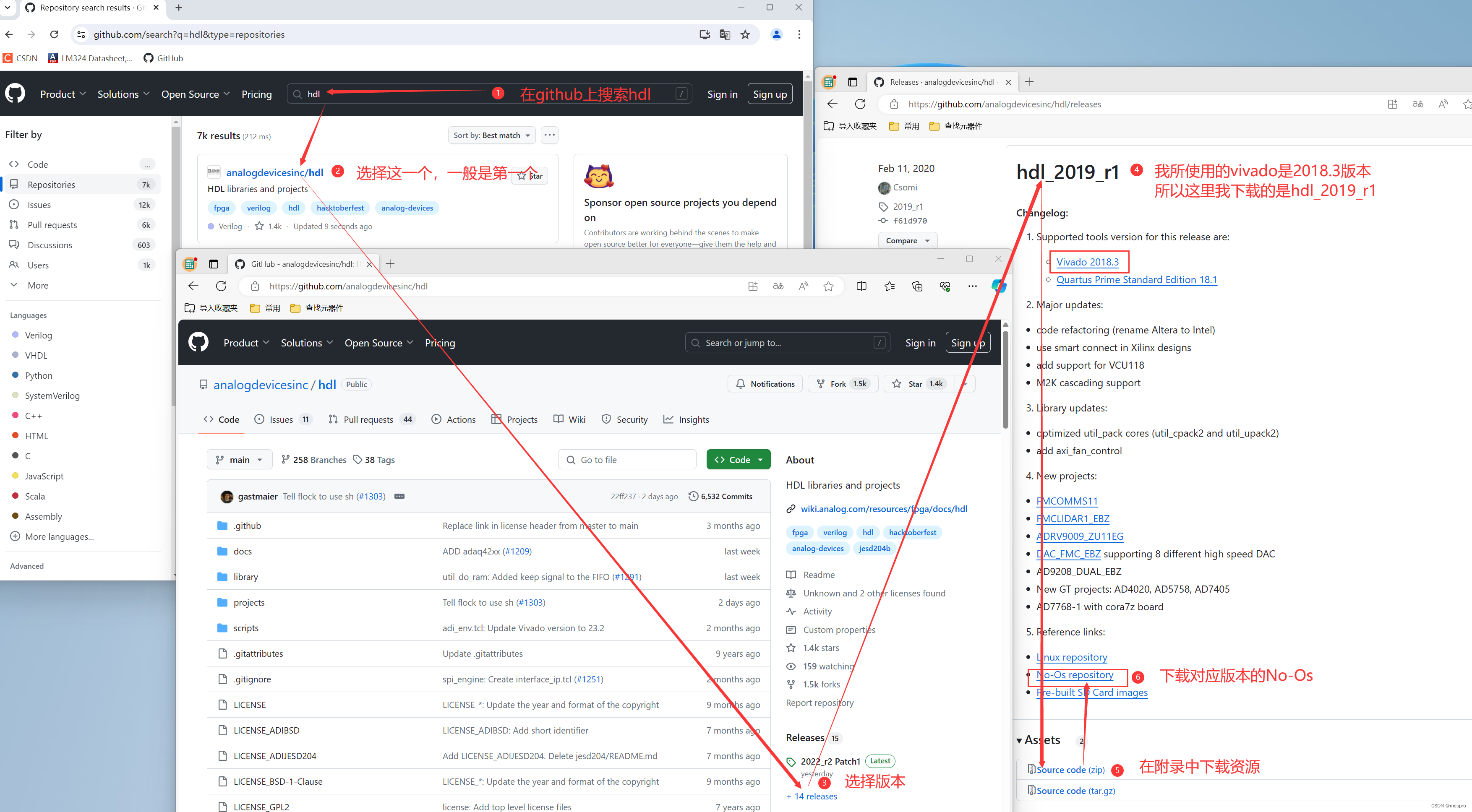
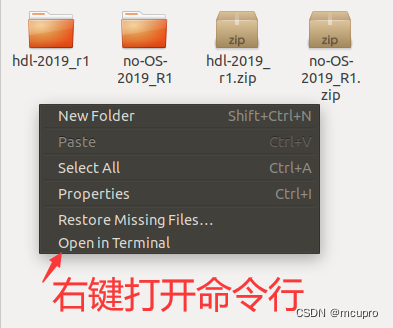
把下载好的资源复制到虚拟机里解压缩,右键打开命令行

设置环境变量-->进入项目目录-->编译-->打开vivado
source /tools/Xilinx/Vivado/2018.3/settings64.sh
cd hdl-2019_r1/projects/adrv9371x/zc706
make
vivado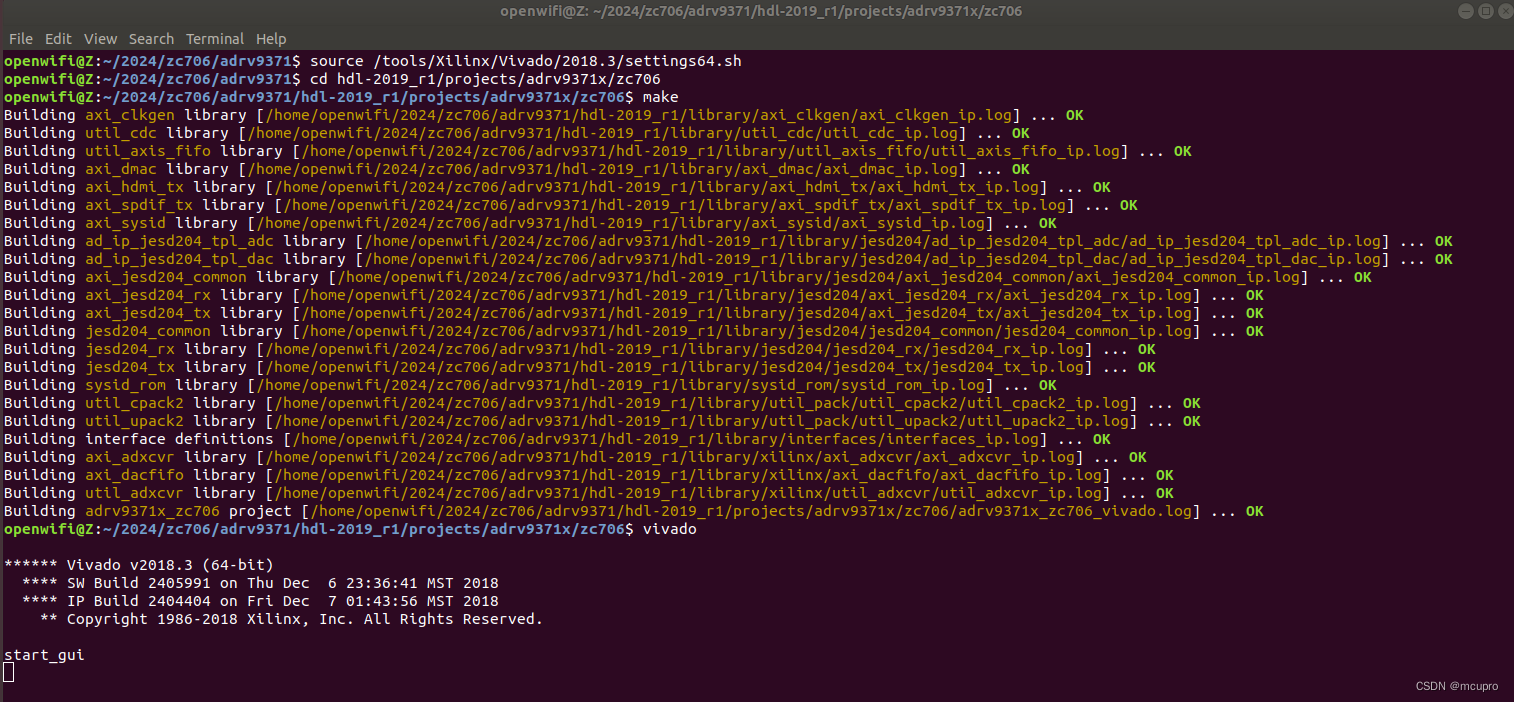
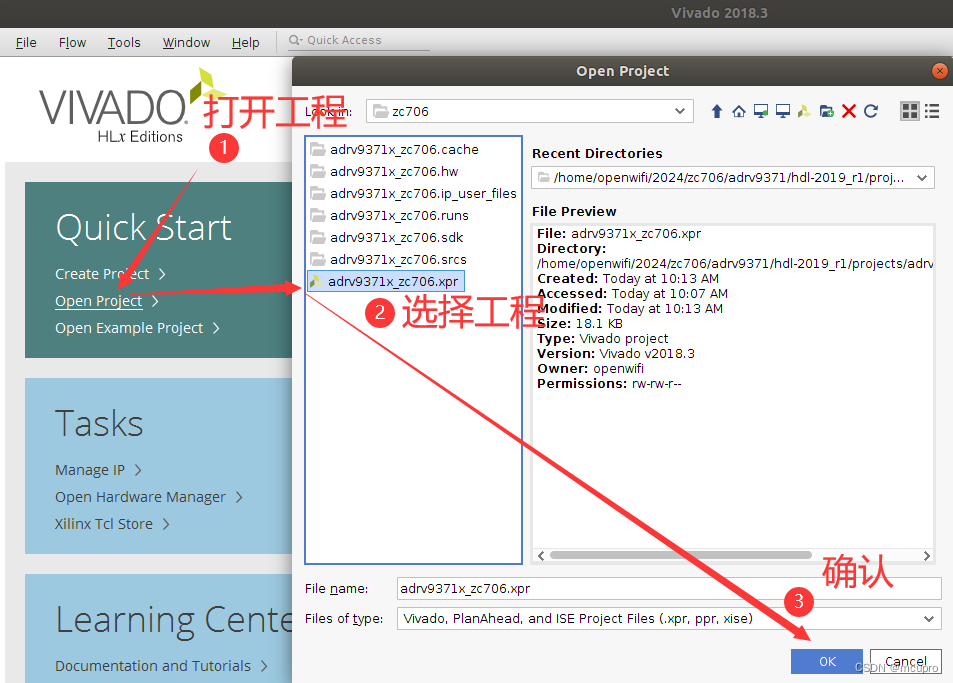
打开工程-->选择工程-->确定
不需要修改直接编译

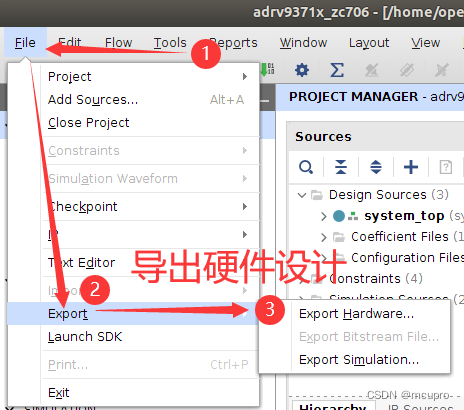
导出硬件设计,后续弹出的提示都选择确认
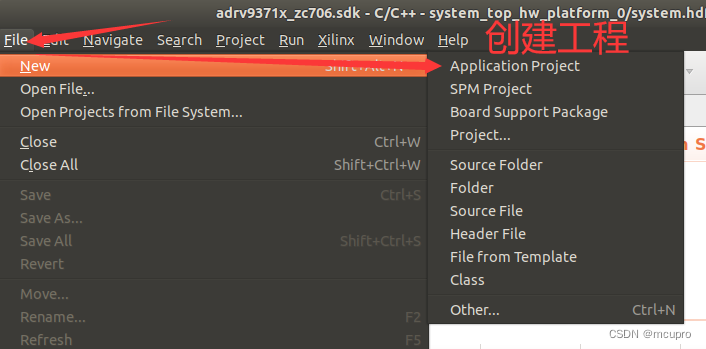
打开SDK,后续弹出的提示都选择确认

新建项目
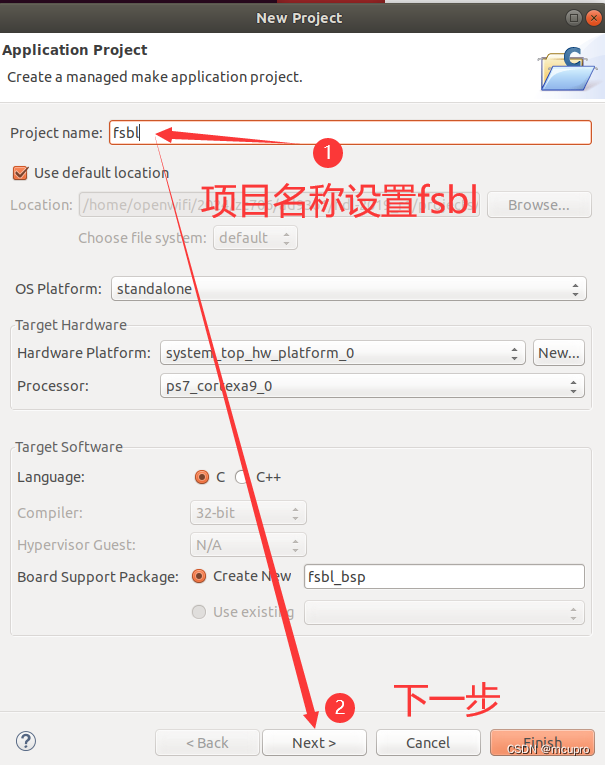
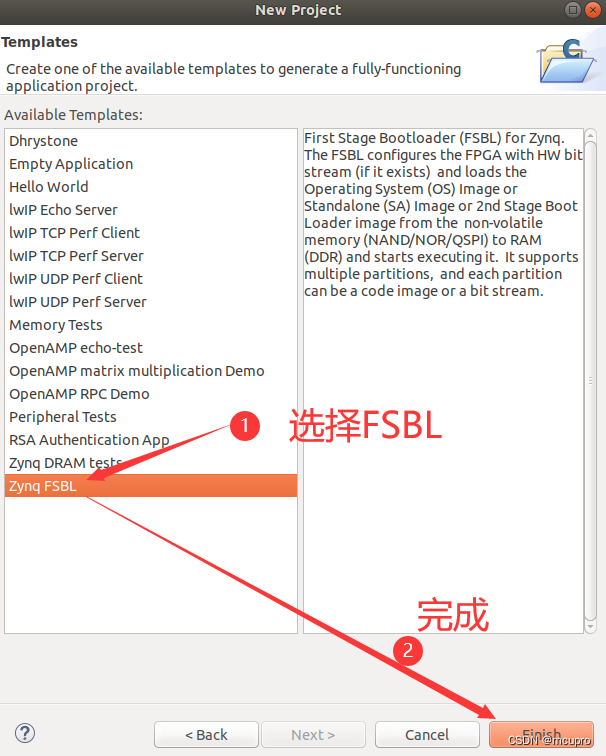
项目名称设置为fsbl-->next-->选择FSBL-->完成。注意SDK不要关闭,后续需要用其生成BOOT.bin
回到最开始的目录,右键再次打开一个命令行窗口
设置环境变量-->进入工程目录-->复制硬件设计文件-->编译工程,等待编译成功
source /tools/Xilinx/Vivado/2018.3/settings64.sh
cd no-OS-2019_R1/projects/ad9371/
cp ../../../hdl-2019_r1/projects/adrv9371x/zc706/adrv9371x_zc706.sdk/system_top.hdf .
make
回到最开始的目录,右键再次打开一个命令行窗口
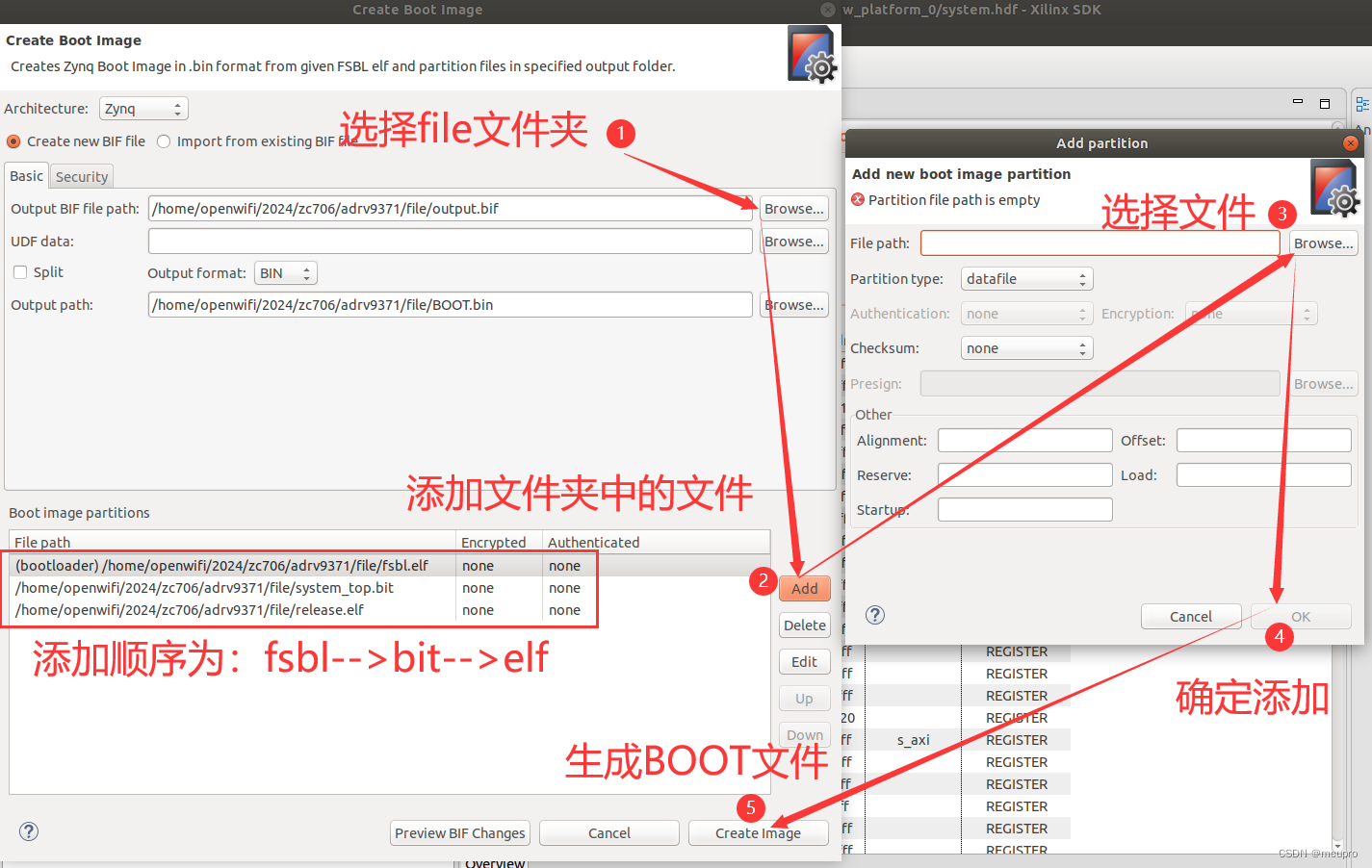
创建file文件夹-->进入文件夹-->复制fsbl文件-->复制bit文件-->复制elf文件
mkdir file
cd file
cp ../hdl-2019_r1/projects/adrv9371x/zc706/adrv9371x_zc706.sdk/fsbl/Debug/fsbl.elf .
cp ../hdl-2019_r1/projects/adrv9371x/zc706/adrv9371x_zc706.runs/impl_1/system_top.bit .
cp ../no-OS-2019_R1/projects/ad9371/build/release.elf .
回到SDK,生成BOOT文件
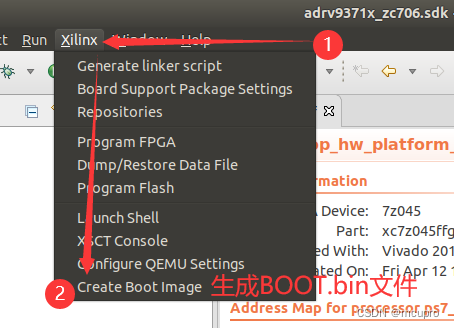
选择file文件夹-->按照顺序添加file中的文件(顺序为:fsbl-->bit-->elf)-->生成BOOT文件
打开file文件夹复制BOOT.bin文件到SD卡中,插入开发板,接好电源,串口线,安装好ADRV9371模块,启动模式设置为SD卡启动

打开串口助手软件,开启电源等待串口打印信息,最后输出Done表示成功
Please wait...
WARNING: AD9528_initialize() issues. Possible cause: REF_CLK not connected.
rx_clkgen: MMCM-PLL locked (122880000 Hz)
tx_clkgen: MMCM-PLL locked (122880000 Hz)
rx_os_clkgen: MMCM-PLL locked (122880000 Hz)
MCS successful
CLKPLL locked
AD9371 ARM version 5.2.2
PLLs locked
Calibrations completed successfully
tx_adxcvr: OK (4915200 kHz)
rx_adxcvr: OK (4915200 kHz)
rx_os_adxcvr: OK (4915200 kHz)
rx_jesd status:Link is enabledMeasured Link Clock: 122.865 MHzReported Link Clock: 122.880 MHzLane rate: 4915.200 MHzLane rate / 40: 122.880 MHzLink status: DATASYSREF captured: YesSYSREF alignment error: No
rx_jesd lane 0 status:
Errors: 0CGS state: DATAInitial Frame Synchronization: YesLane Latency: 1 Multi-frames and 73 OctetsInitial Lane Alignment Sequence: YesDID: 0, BID: 0, LID: 0, L: 2, SCR: 1, F: 4K: 32, M: 4, N: 16, CS: 0, N': 16, S: 1, HD: 0FCHK: 0x47, CF: 0ADJCNT: 0, PHADJ: 0, ADJDIR: 0, JESDV: 1, SUBCLASS: 1FC: 4915200 kHz
rx_jesd lane 1 status:
Errors: 1CGS state: DATAInitial Frame Synchronization: YesLane Latency: 1 Multi-frames and 74 OctetsInitial Lane Alignment Sequence: YesDID: 0, BID: 0, LID: 1, L: 2, SCR: 1, F: 4K: 32, M: 4, N: 16, CS: 0, N': 16, S: 1, HD: 0FCHK: 0x48, CF: 0ADJCNT: 0, PHADJ: 0, ADJDIR: 0, JESDV: 1, SUBCLASS: 1FC: 4915200 kHz
tx_jesd status:Link is enabledMeasured Link Clock: 122.865 MHzReported Link Clock: 122.880 MHzLane rate: 4915.200 MHzLane rate / 40: 122.880 MHzSYNC~: deassertedLink status: DATASYSREF captured: YesSYSREF alignment error: No
rx_os_jesd status:Link is enabledMeasured Link Clock: 122.864 MHzReported Link Clock: 122.880 MHzLane rate: 4915.200 MHzLane rate / 40: 122.880 MHzLink status: DATASYSREF captured: YesSYSREF alignment error: No
rx_os_jesd lane 0 status:
Errors: 0CGS state: DATAInitial Frame Synchronization: YesLane Latency: 2 Multi-frames and 8 OctetsInitial Lane Alignment Sequence: YesDID: 0, BID: 0, LID: 0, L: 2, SCR: 1, F: 2K: 32, M: 2, N: 16, CS: 0, N': 16, S: 1, HD: 0FCHK: 0x43, CF: 0ADJCNT: 0, PHADJ: 0, ADJDIR: 0, JESDV: 1, SUBCLASS: 1FC: 4915200 kHz
rx_os_jesd lane 1 status:
Errors: 0CGS state: DATAInitial Frame Synchronization: YesLane Latency: 2 Multi-frames and 6 OctetsInitial Lane Alignment Sequence: YesDID: 0, BID: 0, LID: 1, L: 2, SCR: 1, F: 2K: 32, M: 2, N: 16, CS: 0, N': 16, S: 1, HD: 0FCHK: 0x44, CF: 0ADJCNT: 0, PHADJ: 0, ADJDIR: 0, JESDV: 1, SUBCLASS: 1FC: 4915200 kHz
tx_dac: Successfully initialized (245730590 Hz)
rx_adc: Successfully initialized (122865295 Hz)
rx_obs_adc: Successfully initialized (245730590 Hz)
Done资源分享
整个项目最终文件与BOOT.bin

项目及BOOT.bin
链接:https://pan.baidu.com/s/1oxcjD2flhFfdV8PWVnOh_w
提取码:g31r 虚拟机镜像,内置vivado2018.3版本
链接:https://pan.baidu.com/s/13LNnIGnK-PFoAzuVh-1g-g
提取码:v06p 这篇关于TQZC706开发板教程:在ZC706上运行ADRV9371(vivado2018.3)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








