本文主要是介绍【RV1106的ISP使用记录之一】基础环境搭建,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
公司缺少ISP工程师,做为图像算法工程师的我这就不就给顶上来了么,也没给发两份工资,唉~
先写个标题,占一个新坑,记录RK平台的传统ISP工作。
一、基础环境的硬件包括三部分:
1、相机环境,用于采集数据
2、WIN环境,用于运行IQ TURNING工具,负责采集图和标定;
3、Linux环境,用于操控相机,配合运行server程序。
通过网线连接

二、基础环境的软件也包括三部分
1、PC端-运行RK的相机调试工具RKISP_Tuner_v2.0.f_0826_test-注意该工具需要配合MATLAB2016使用,先安装MATLAB2016。
2、Camera端运行某个应用软件即可。(如果使用开发板,设备应该可以直接运行。如果使用核心板,自己连接Sensor,还需要从驱动开始写起,这块非我擅长,跳过)
3、Linux端,连接相机,运行rkaiq_tool_server 工具。
注意:第1,2项通常都比较容易获取,对于3中的rkaiq_tool_server工具,需要编译生成。
如果你使用的是RV1106的SDK,源码中时不包括这部分的。
几个获取途径:1、你如果使用的是开发板,可以联系开发板厂家获取。
2、使用RK3588/RV1126的SDK中的源码,替换成RV1106的编译器进行生成。
我这里使用的是开发板厂家提供的rkaiq_tool_server。
三、设备连接
1、正常启动相机;
2、Linux 通过talnet进入相机,将rkaiq_tool_server 放在 /data/路径下
运行该脚本,
# ./rkaiq_tool_server
生成如下内容:
......
[aiqtool][Setup]:Linux,Create domain socket success.
[aiqtool][Setup]:Credentials from SO_PEERCRED: pid=325, euid=0, egid=0
[aiqtool][main]:#### ToolServer connect AIQ success ####
[aiqtool][Process]:TCPServer::Process
[aiqtool][Accepted]:TCPServer::Accepted
3、在PC端运行RKISP_Tuner_v2.0.f_0826_test 工具
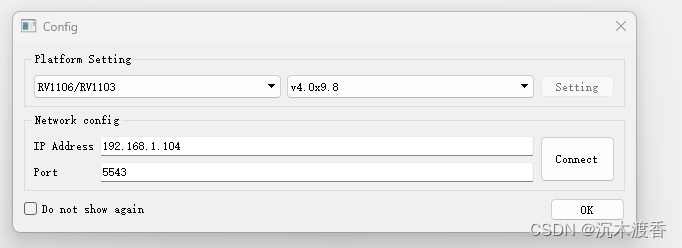
配置好相机IP,点击连接,此时Linux端显示如下内容,表示两者连接成功。
[aiqtool][Accepted]:socket accept ip 192.168.1.12
[aiqtool][Accepted]:socket accept close
[aiqtool][Recvieve]:TCPServer::Recvieve enter 5
至此,基础环境搭建完成,基于该环境即可进行Sensro的标定相关工作。
这篇关于【RV1106的ISP使用记录之一】基础环境搭建的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





