本文主要是介绍STM32 F103 ZET6学习笔记1:串口与通用定时器的配置使用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
今日又突然回归到了我的学习STM32的老本行了,这次没想到第一个笔记就是配置通用定时器与串口通信的配通。
在我学习嵌入式的这么长时间里,定时器在我心目中的地位一直很高,它是能决定程序有序执行、产生定时中断、单片机实现PWM输出功能等 的重要部件。
其次就是串口通信,串口通信是我在学习单片机设计时经常用到的纠错Debug手段,也是单片机与传感器,单片机与电脑通信的关键模块,而且串口通信对于数据处理的艺术博大精深,学习串口通信是能够让人深刻体验到低层数据类型、数据溢出错误、数据进制转换处理等的学习之路。
文章提供全部代码解释、测试工程下载、测试效果图。
目录
串口通信的配置使用:
1、串口相关操作函数:
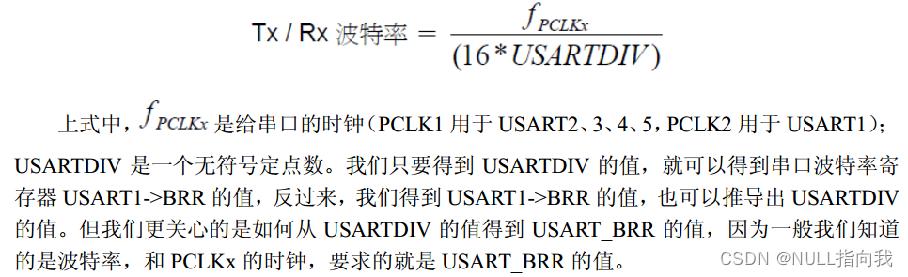
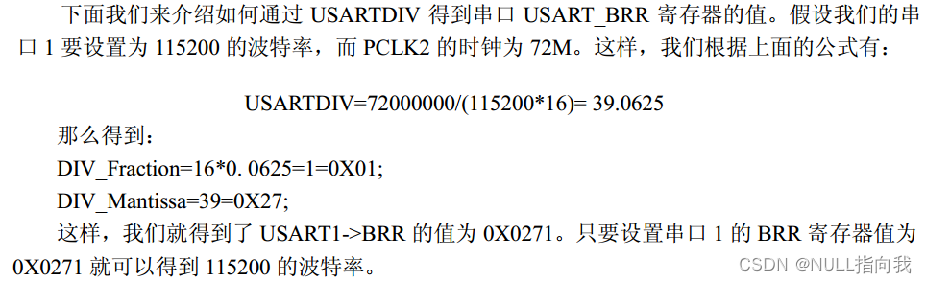
2、波特率的计算方法:
3、串口配置通信一般步骤:
4、STM32F103ZET6的串口引脚资源:
5、串口初始化函数的编写:
定时器的配置使用:
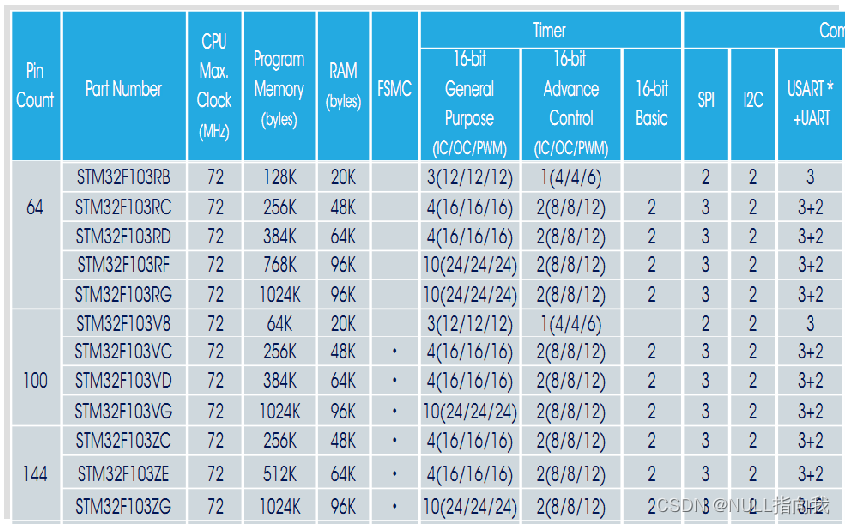
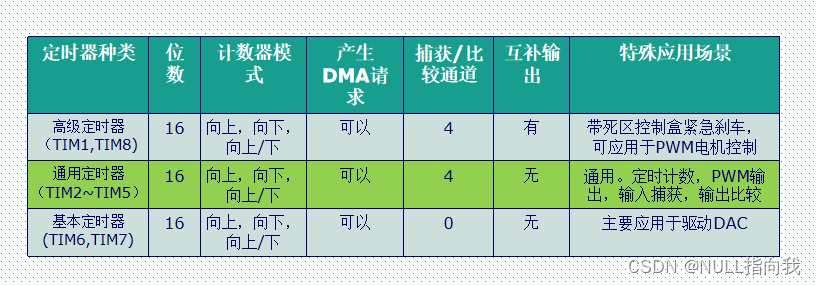
STM32F10x系列总共最多有8个定时器:
计数模式:
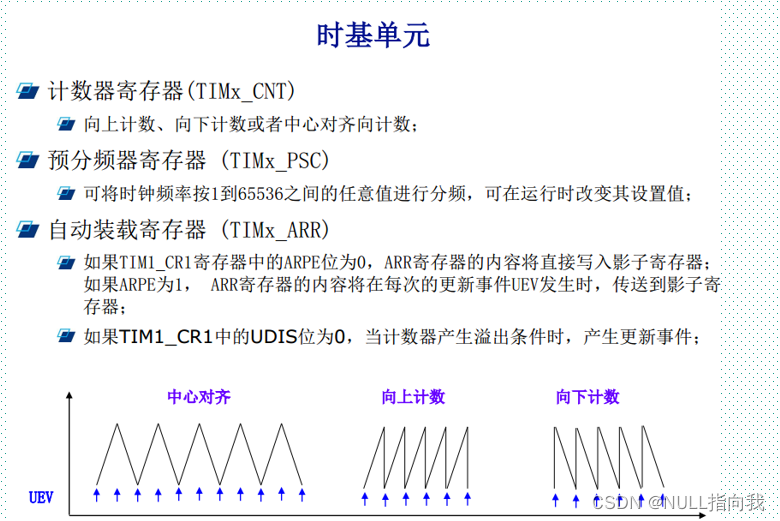
时基单元:
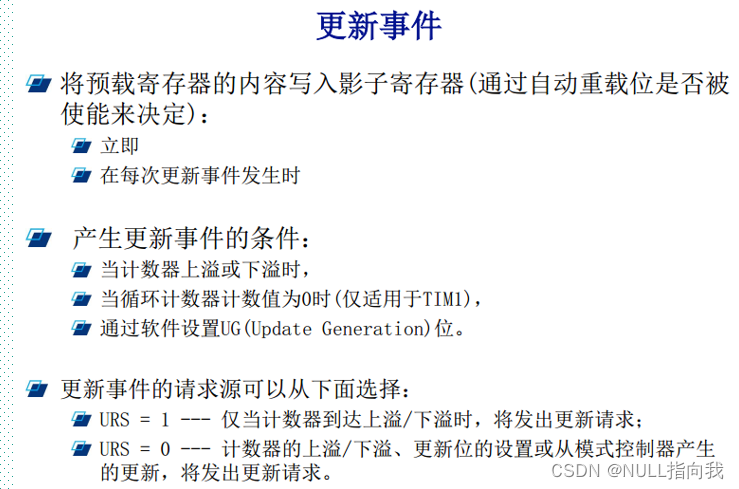
更新事件:
定时中断初始化函数的编写:
串口通信的配置使用:
1、串口相关操作函数:
以下列举了一些库函数版本的串口相关操作函数:
是库函数版本自带的,需要正确传参数或者调用即可:
void USART_Init(); //串口初始化:波特率,数据字长,奇偶校验,硬件流控以及收发使能
void USART_Cmd();//使能串口
void USART_ITConfig();//使能相关中断void USART_SendData();//发送数据到串口,DR
uint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据FlagStatus USART_GetFlagStatus();//获取状态标志位
void USART_ClearFlag();//清除状态标志位
ITStatus USART_GetITStatus();//获取中断状态标志位
void USART_ClearITPendingBit();//清除中断状态标志位
2、波特率的计算方法:
这个一般用不到,网上都是现成库函数调用计算的,我们只做了解即可:
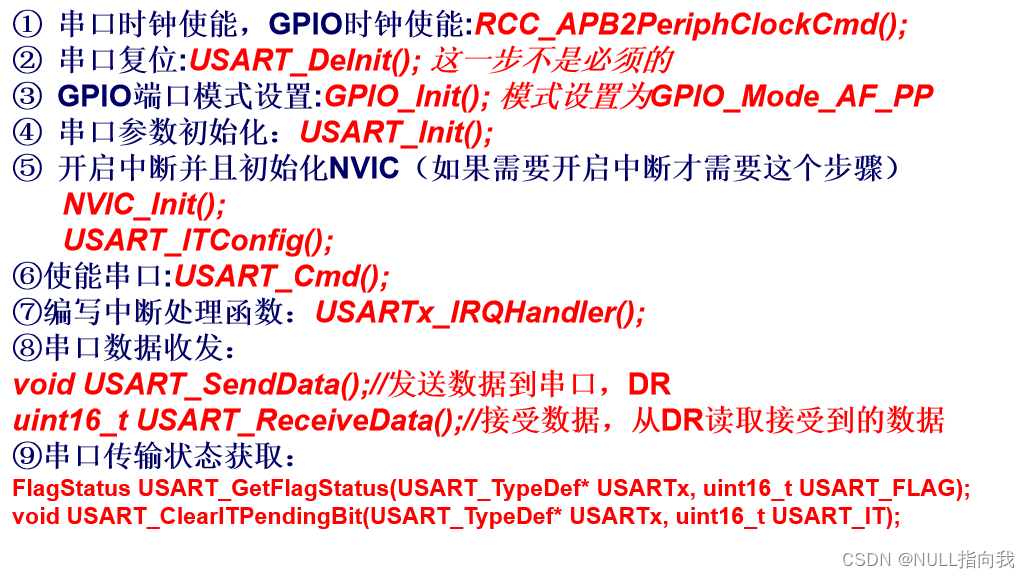
3、串口配置通信一般步骤:
这些步骤:
1~6 就是我们用来编程设计串口初始化函数的
7 是串口中断服务函数,是产生串口接收中断时执行的函数操作
8~9 是根据实际情况进行调用使用的
4、STM32F103ZET6的串口引脚资源:
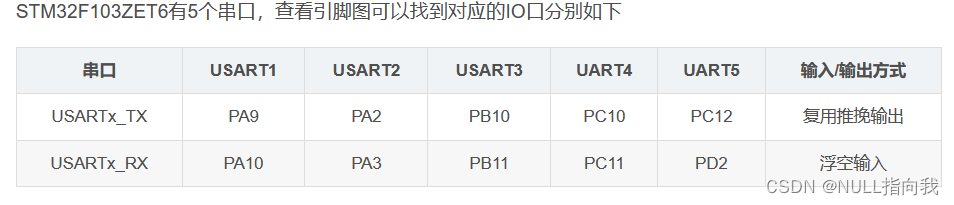
其中需要注意的是在串口初始化时的总线开启阶段:
USART1 挂在APB2下
USART2,USART3,USART4,USART5 挂在APB1下
5、串口初始化函数的编写:
函数配置通信串口1编写如下:
其余串口改改串口号与引脚即可:
void My_USART1_Init(void)
{GPIO_InitTypeDef GPIO_InitStrue;USART_InitTypeDef USART_InitStrue;NVIC_InitTypeDef NVIC_InitStrue;//开启APB2 总线的有关GPIOA与USART1的时钟使能RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//初始化PA9引脚GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP;GPIO_InitStrue.GPIO_Pin=GPIO_Pin_9;GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz;GPIO_Init(GPIOA,&GPIO_InitStrue);//初始化PA10引脚 GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IN_FLOATING;GPIO_InitStrue.GPIO_Pin=GPIO_Pin_10;GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz;GPIO_Init(GPIOA,&GPIO_InitStrue);//SART_InitStrue结构体初始化波特率USART_InitStrue.USART_BaudRate=115200;//初始化配置表示不使用硬件流控制USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//配置USART(通用同步/异步收发器) USART_Mode_Tx 和 USART_Mode_Rx 是枚举值,分别表示发送模式和接收模式。USART_InitStrue.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;//偶校验设置__不使用奇偶校验USART_InitStrue.USART_Parity=USART_Parity_No;//停止位设置为1USART_InitStrue.USART_StopBits=USART_StopBits_1;//配置USART(通用同步/异步收发器)的数据位长度。每个数据字包含8个数据位(bit)。USART_InitStrue.USART_WordLength=USART_WordLength_8b;//使用之前初始化好的结构体初始化串口1USART_Init(USART1,&USART_InitStrue);//使能串口1USART_Cmd(USART1,ENABLE);USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//开启接收中断/*这行代码将NVIC的中断请求通道设置为USART1_IRQn,意味着NVIC将会响应USART1的中断请求。当USART1有中断事件发生时(例如,接收到数据或发送缓冲区为空等),NVIC会根据其配置来决定是否跳转到中断服务程序(ISR)去处理这个中断。*/NVIC_InitStrue.NVIC_IRQChannel=USART1_IRQn;/*在这行代码中,将 NVIC_IRQChannelCmd 成员设置为 ENABLE,意味着在NVIC初始化后,相应的中断请求通道将被启用。当该中断源被触发时,NVIC将根据配置的中断优先级来决定是否响应这个中断,并跳转到相应的中断服务程序(ISR)执行中断处理代码。*/NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE;/*设置特定中断请求(IRQ)通道的抢占优先级(Preemption Priority)。1 是抢占优先级的数值,它决定了在多个中断同时发生时,哪个中断应该首先得到处理。*/NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1;/*配置NVIC(Nested Vectored Interrupt Controller,嵌套向量中断控制器)的初始化结构体时,设置特定中断请求(IRQ)通道的子优先级(SubPriority)。1 是子优先级的数值,它用于在多个中断具有相同抢占优先级时,进一步细分中断的优先级。*/NVIC_InitStrue.NVIC_IRQChannelSubPriority=1;//初始化NVIC(Nested Vectored Interrupt Controller,嵌套向量中断控制器)NVIC_Init(&NVIC_InitStrue);}//串口1中断服务函数:
void USART1_IRQHandler(void)
{u8 res;//查询USART(通用同步/异步收发器)的中断状态/*USART_IT_RXNE 是一个宏定义或枚举值,表示USART的接收缓冲区非空中断标志(Receive Buffer Not Empty Interrupt Flag)。当USART的接收缓冲区有数据可读时,这个标志会被设置。*/if(USART_GetITStatus(USART1,USART_IT_RXNE)){//将缓冲区收到的发出去:res= USART_ReceiveData(USART1); USART_SendData(USART1,res); }
}
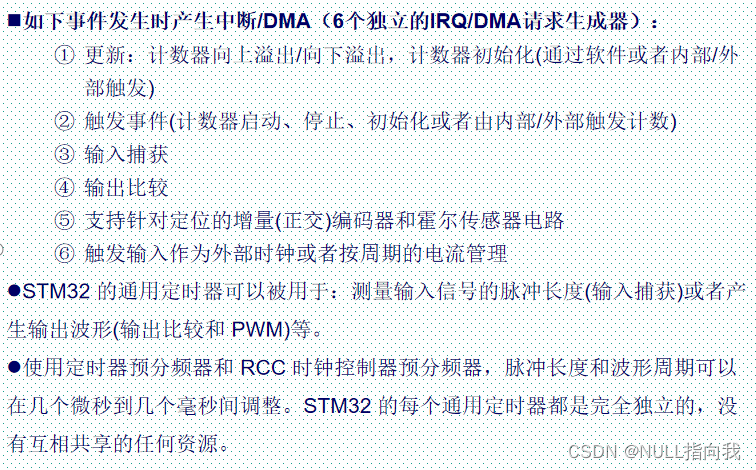
定时器的配置使用:
STM32F10x系列总共最多有8个定时器:
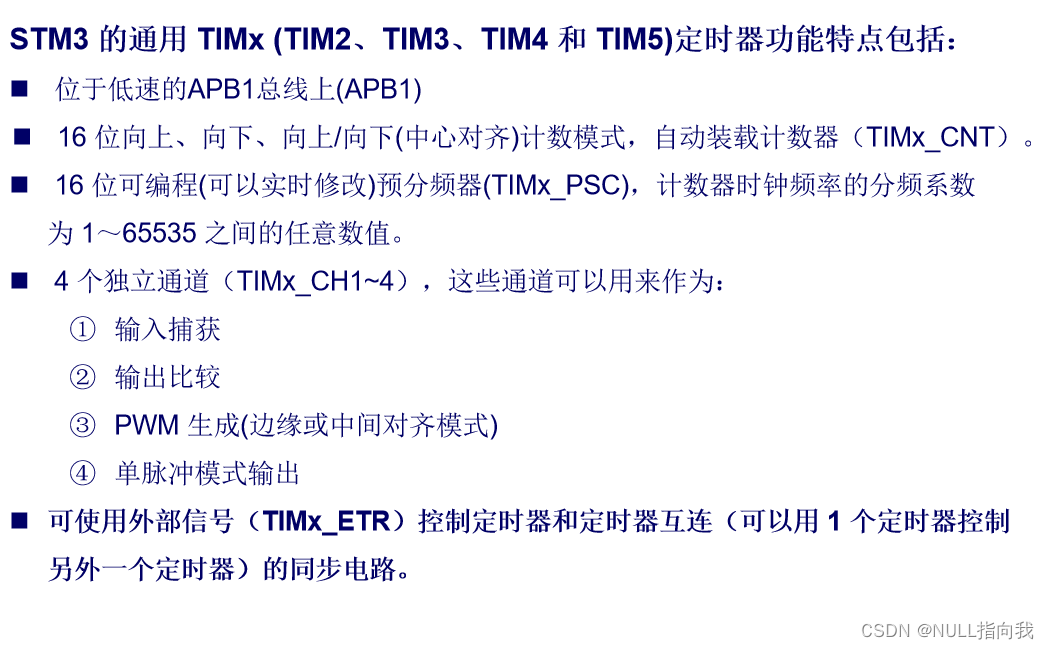
计数模式:

时基单元:
更新事件:
定时中断初始化函数的编写:
//通用定时器3中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器3!
void TIM3_Int_Init(u16 arr,u16 psc)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能//定时器TIM3初始化TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断//中断优先级NVIC设置NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器TIM_Cmd(TIM3, ENABLE); //使能TIMx
}
//定时器3中断服务程序
void TIM3_IRQHandler(void) //TIM3中断
{if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否{TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx更新中断标志 LED1=!LED1;}
}
这篇关于STM32 F103 ZET6学习笔记1:串口与通用定时器的配置使用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



