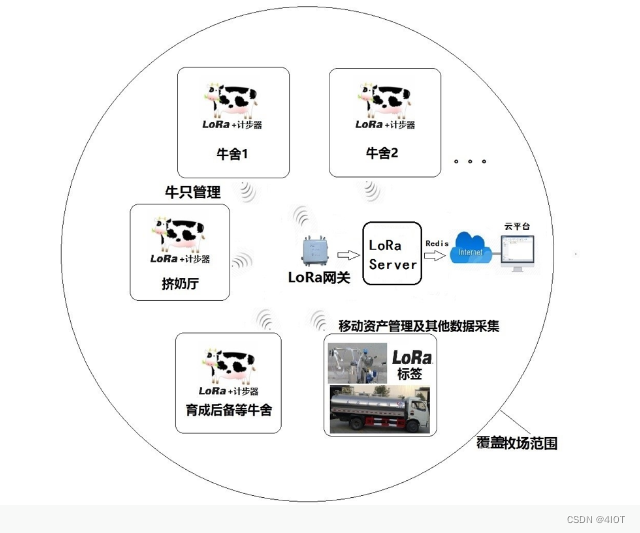
本文主要是介绍智慧牧场数据 7,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 体征数据采集
需求:获取奶牛记步信息
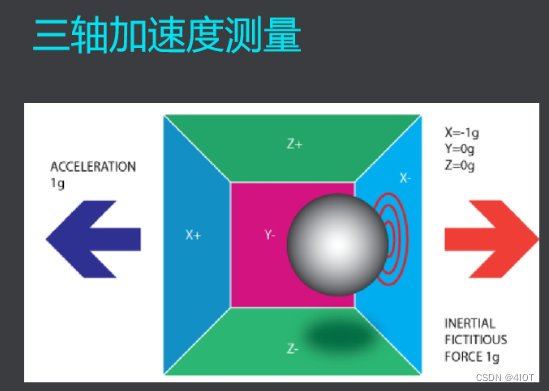
三轴加速度测量:加速度测量计反应的加速向量与当前的受力方向是相反,单位为g

陀螺仪,是用来测量角速度的,单位为度每秒(deg/s) 2000deg/s 相当于1秒钟多少转
1.1 原理图
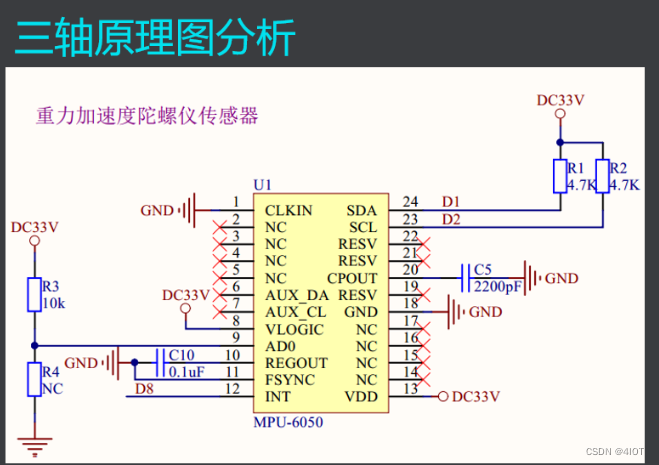
IIC的地址最后一1位
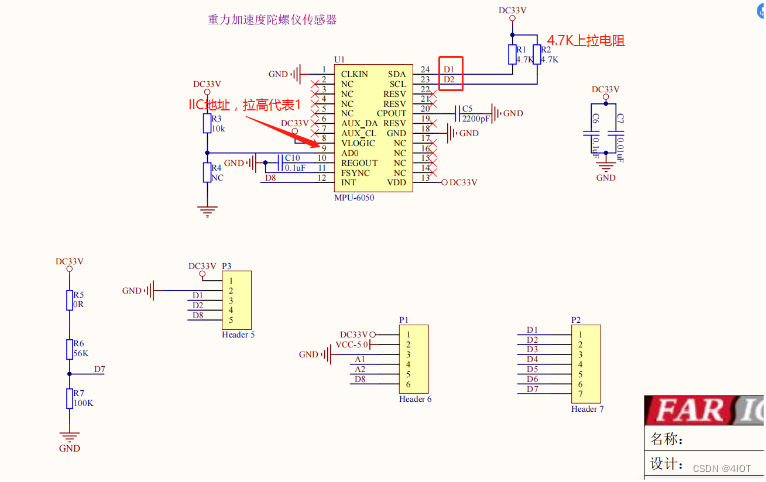
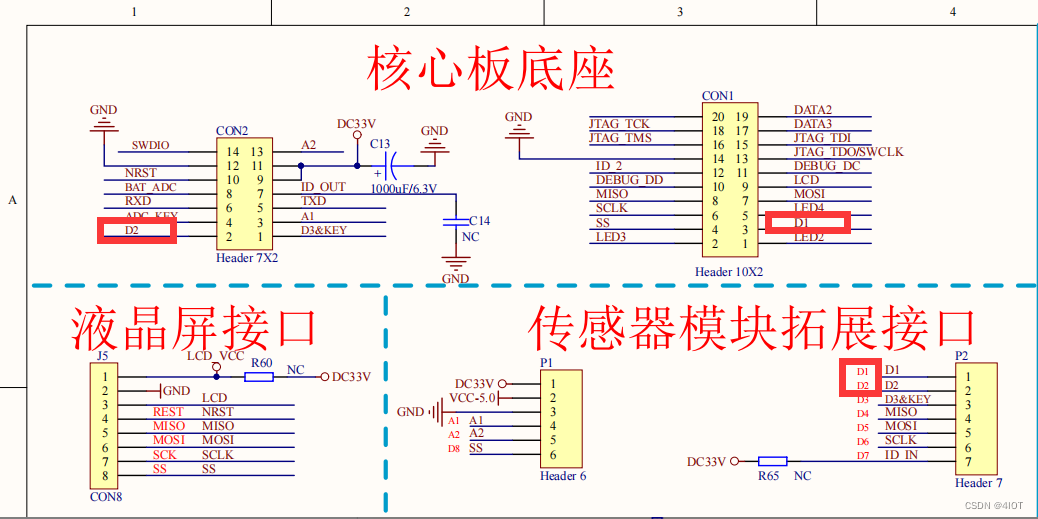
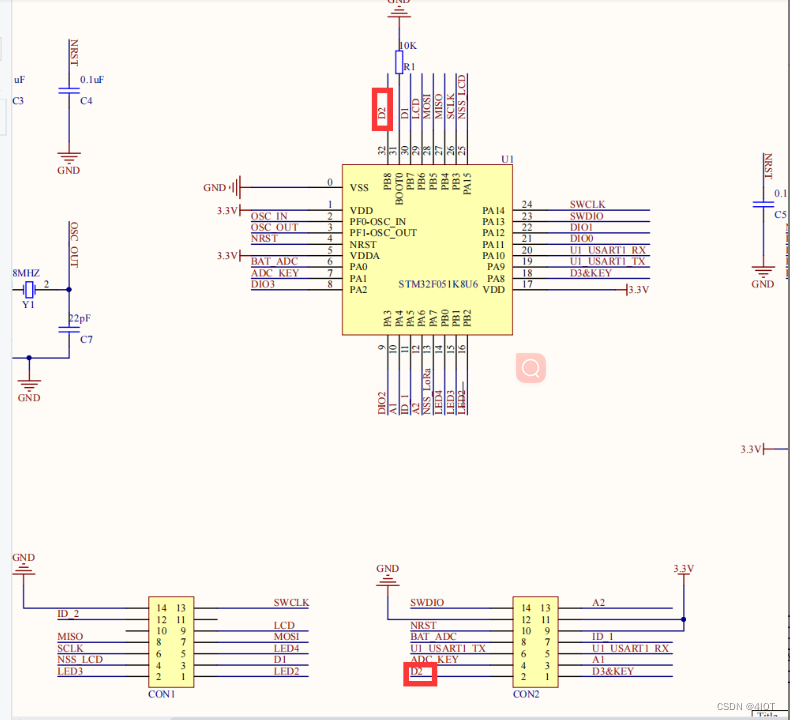
一键还原原理图d1、d2连接在核心板底座的con1和con2
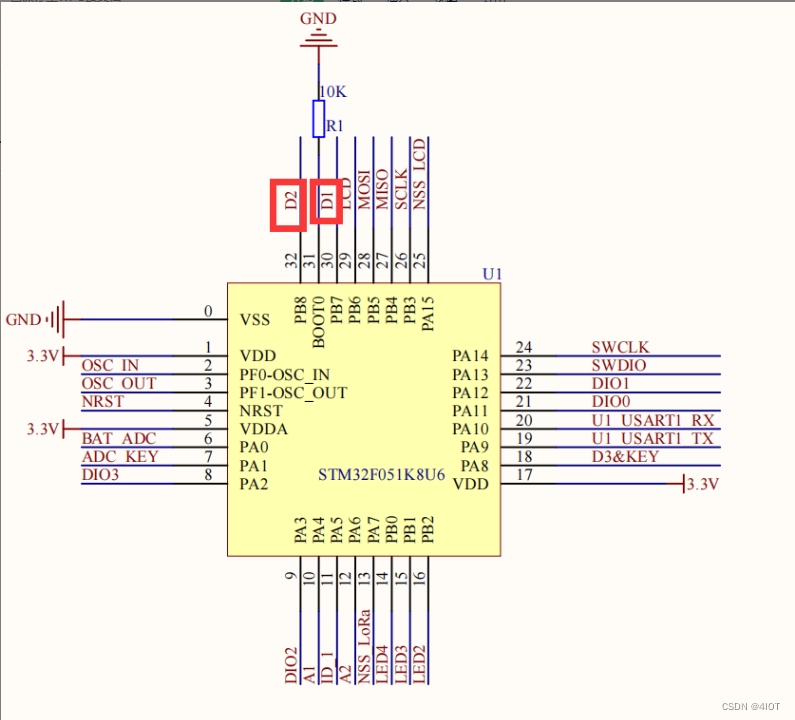
同时,这两个引脚pb7、8可以直接使用IIC
1.2 驱动流程
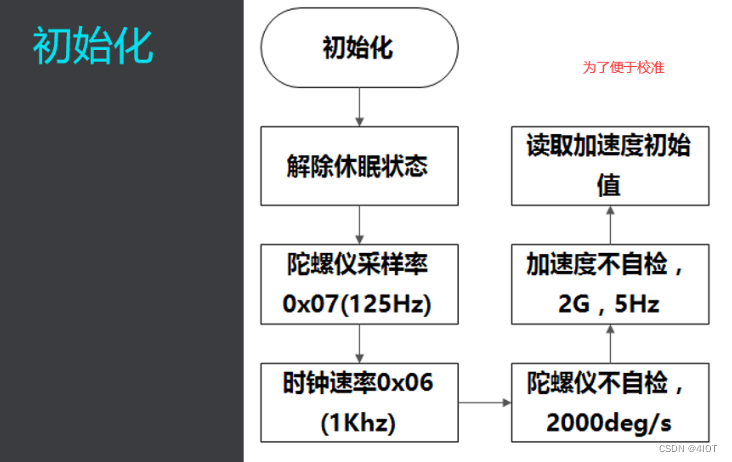
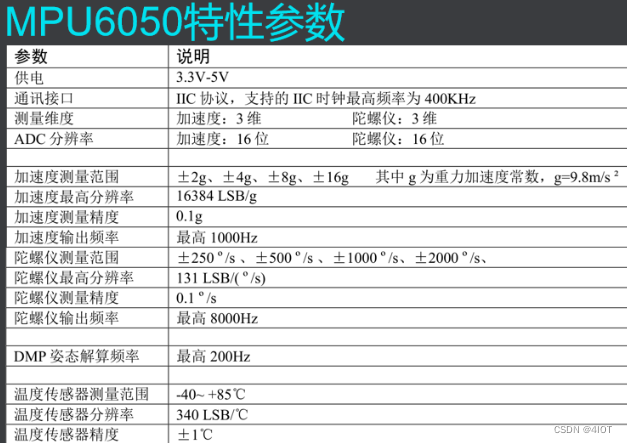
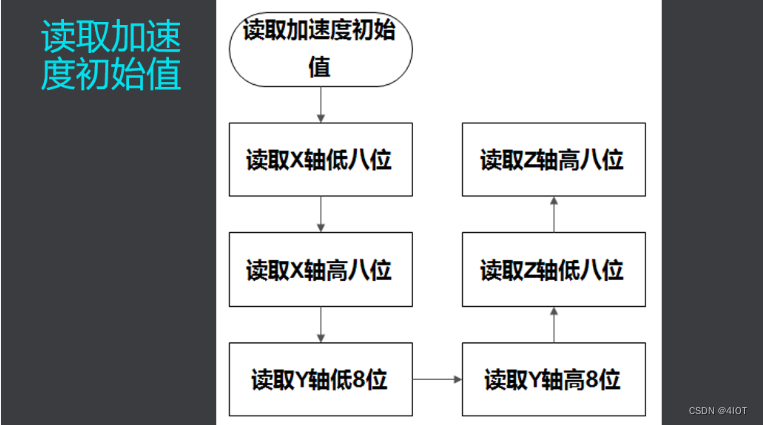
陀螺仪测量范围是+-2000,加速度测量范围是+-2G,读取初始值是为了便于校准。每次读取到xyz要减去这个值
获取两个字节数据
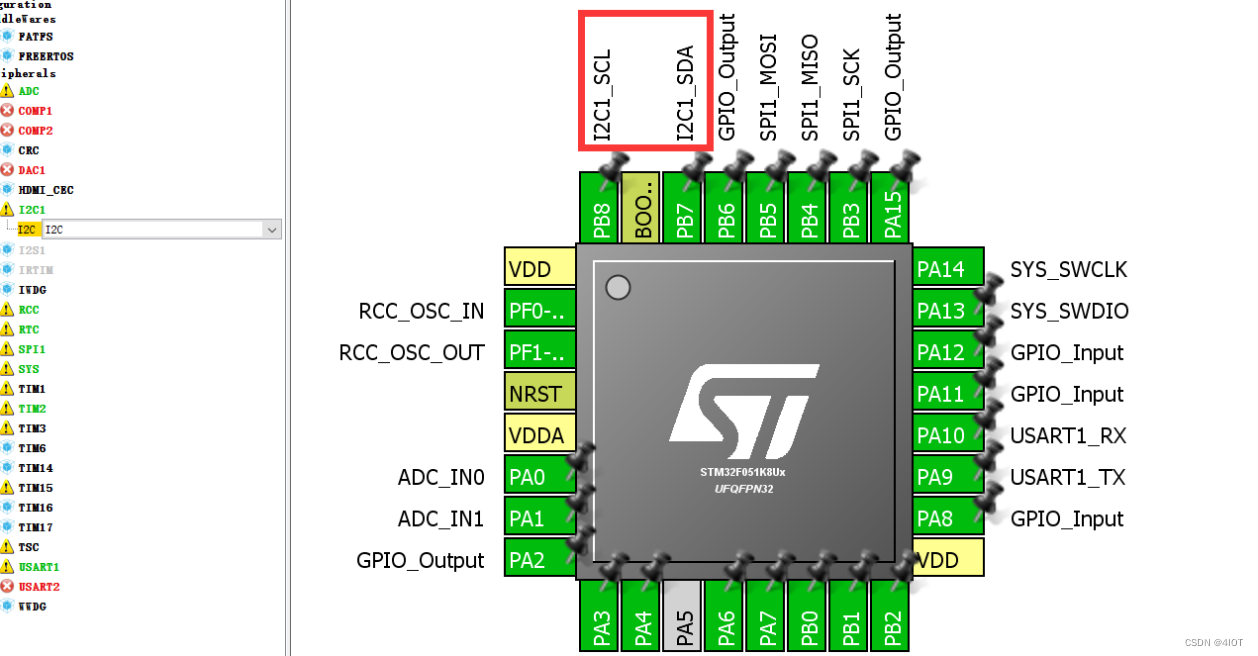
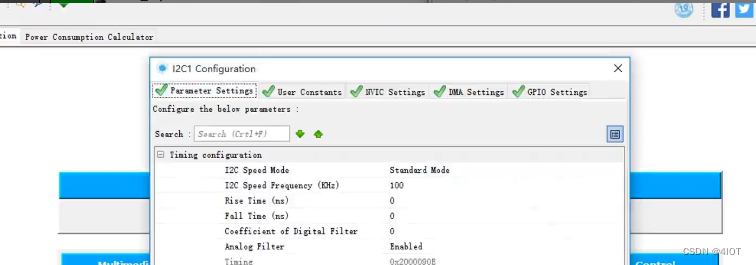
1.3 修改cubmx工程
I2C使能 pb7和pb8引脚配置
IIC标准工程
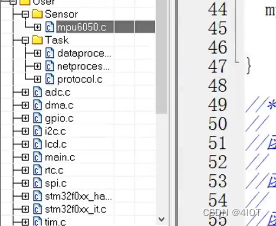
建立sensor文件夹,用于放置传感器相关文件
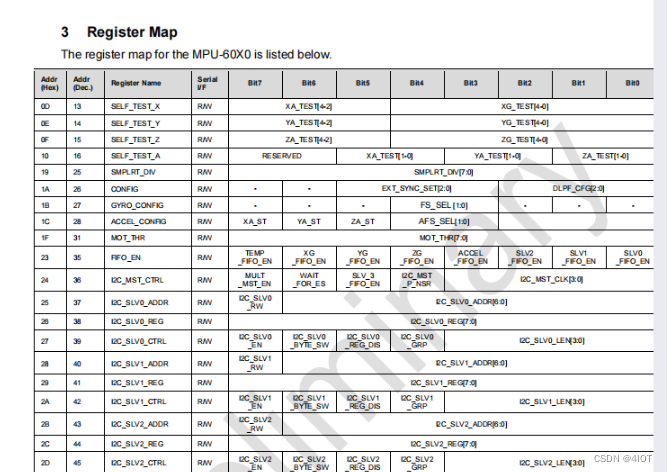
查看芯片手册
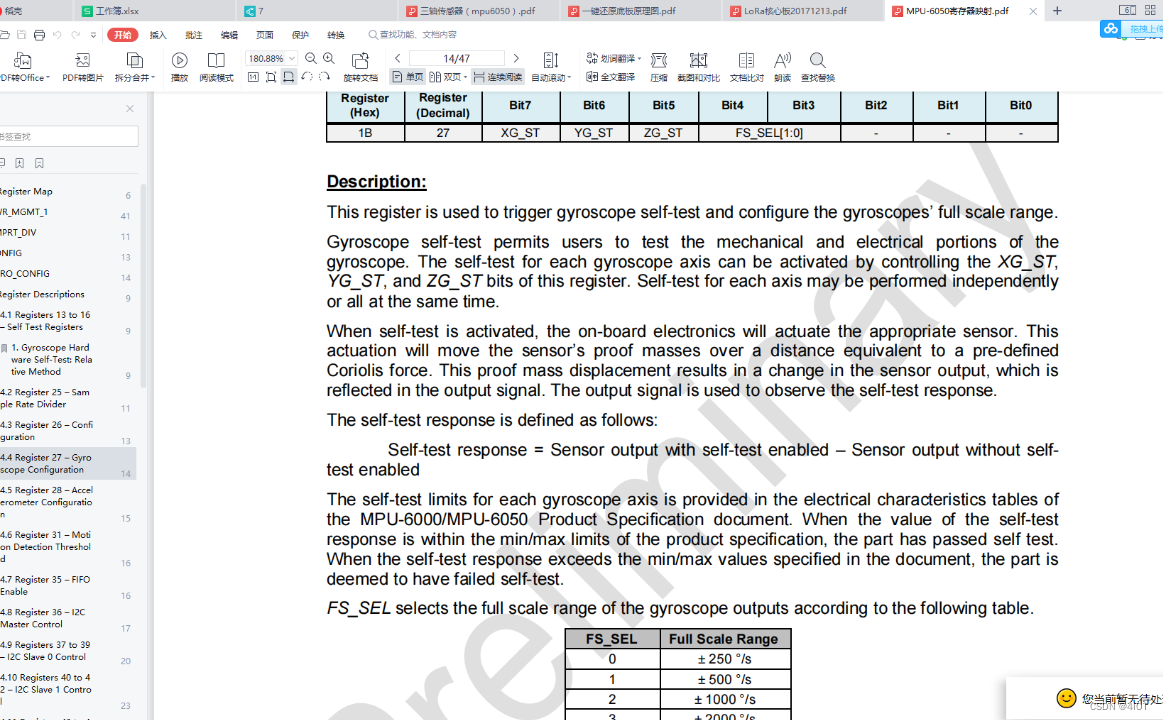
采样频率参考MPU-6050寄存器映射
1.4 修改工程代码
使用i2c的阅读函数HAL_I2C_Mem_Read()、write
#include "mpu6050.h"#include "string.h"
#include "stdio.h"#include "i2c.h"
int16_t Accx,Accy,Accz;//**********************************//
//函数名称: InitMpu6050
//函数描述: 初始化MPU6050
//函数参数: 无
//返回值: 无
//*******************************//void InitMpu6050(void)
{uint8_t WriteCmd = 0;//解除休眠状态WriteCmd = 0x00;HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, PWR_MGMT_1, I2C_MEMADD_SIZE_8BIT, &WriteCmd, 1, 0x10);//时钟速率0x06(1Khz)陀螺仪采样率0x07(125Hz)WriteCmd = 0x07;HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, SMPLRT_DIV, I2C_MEMADD_SIZE_8BIT, &WriteCmd, 1, 0x10); WriteCmd = 0x06;HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, CONFIG, I2C_MEMADD_SIZE_8BIT, &WriteCmd, 1, 0x10);//不自检,2000deg/sWriteCmd = 0x18;HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, GYRO_CONFIG, I2C_MEMADD_SIZE_8BIT, &WriteCmd, 1, 0x10);//(不自检,2G,5Hz)WriteCmd = 0x01;HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, ACCEL_CONFIG, I2C_MEMADD_SIZE_8BIT, &WriteCmd, 1, 0x10);HAL_Delay(10);mpu6050_verify(&Accx, &Accy, &Accz); //读取第一次的值}//**********************************//
//函数名称: mpu6050_verify
//函数描述: MPU6050校验
//函数参数: int16_t *x, int16_t *y, int16_t *z
//返回值: 无
//*******************************//void mpu6050_verify(int16_t *x, int16_t *y, int16_t *z)
{uint8_t ReadBuffer[10] = {0};HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_XOUT_L, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[0],1, 0x10);HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_XOUT_H, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[1],1, 0x10); *x = (ReadBuffer[1]<<8)+ReadBuffer[0] ;HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_YOUT_L, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[0],1, 0x10);HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_YOUT_H, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[1],1, 0x10); *y = (ReadBuffer[1]<<8)+ReadBuffer[0] ;HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_ZOUT_L, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[0],1, 0x10);HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_ZOUT_H, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[1],1, 0x10); *z = (ReadBuffer[1]<<8)+ReadBuffer[0] ;}//**********************************//
//函数名称: mpu6050_ReadData
//函数描述: MPU6060获取三轴数据
//函数参数: int16_t *x, int16_t *y, int16_t *z
//返回值: 无
//*******************************//void mpu6050_ReadData(float *Mx, float *My, float *Mz)
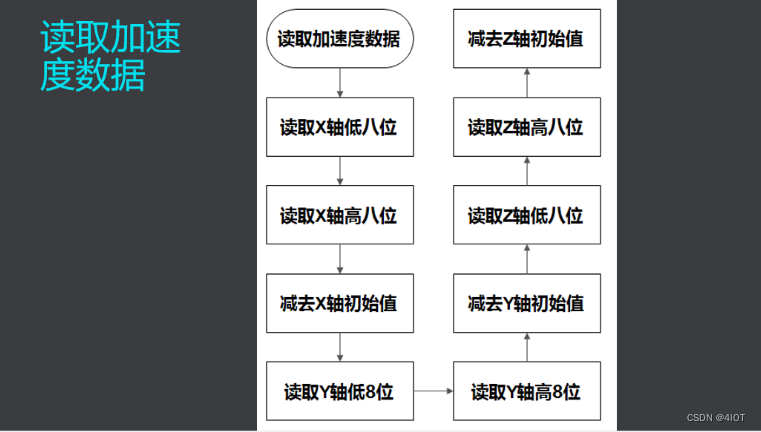
{int16_t x,y,z;uint8_t ReadBuffer[10] = {0};HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_XOUT_L, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[0],1, 0x10);HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_XOUT_H, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[1],1, 0x10); x = (ReadBuffer[1]<<8)+ReadBuffer[0] ;x -= Accx;*Mx = ((float)x)/16384;HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_YOUT_L, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[0],1, 0x10);HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_YOUT_H, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[1],1, 0x10); y = (ReadBuffer[1]<<8)+ReadBuffer[0] ;y -= Accy;*My = ((float)y)/16384;HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_ZOUT_L, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[0],1, 0x10);HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_ZOUT_H, I2C_MEMADD_SIZE_8BIT,&ReadBuffer[1],1, 0x10); z = (ReadBuffer[1]<<8)+ReadBuffer[0] ;z -= Accz;*Mz = ((float)z)/16384;}
三轴数据读取,减去初始值校准
主程序中定义全局变量的xyz坐标

初始化I2C
初始化mpu6050
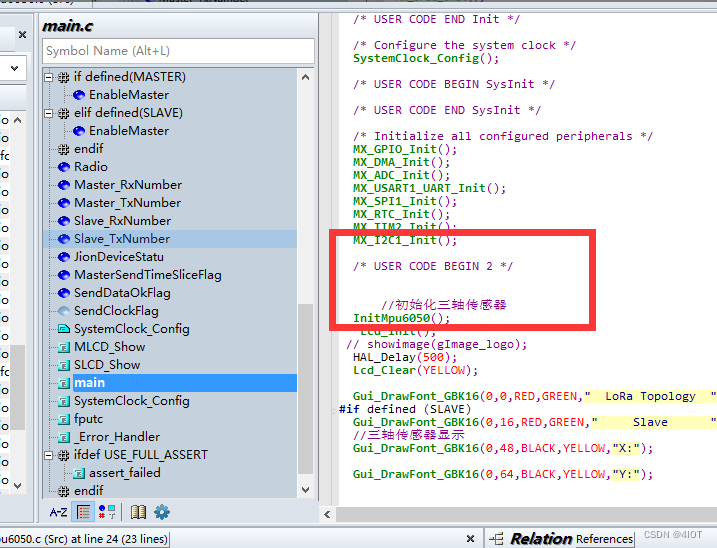
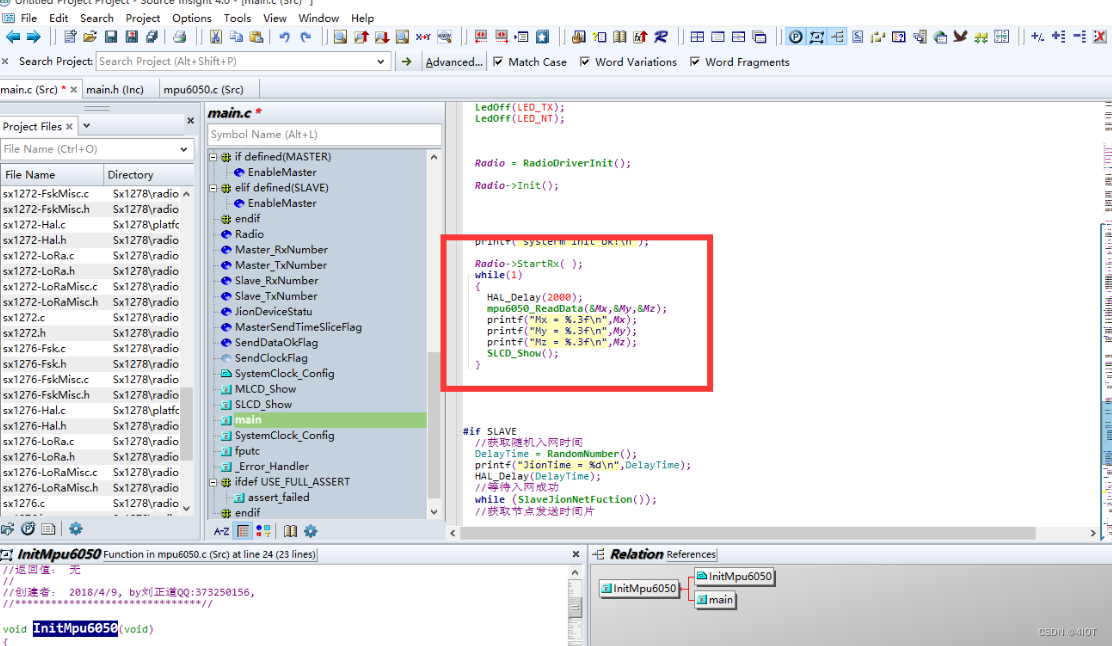
while(1)之前又写了一个while(1)
2 饲养环境采集
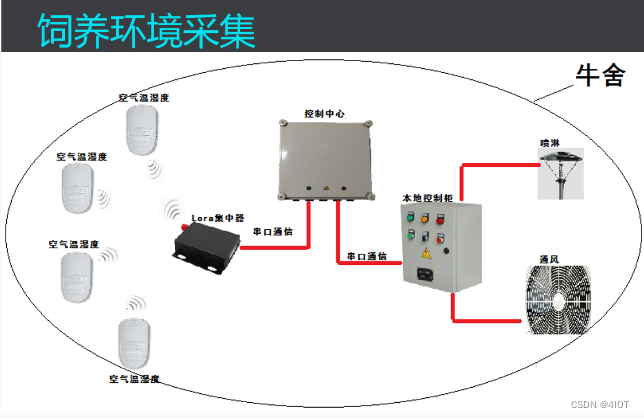
lora中集成温湿度传感器


2.1 原理图
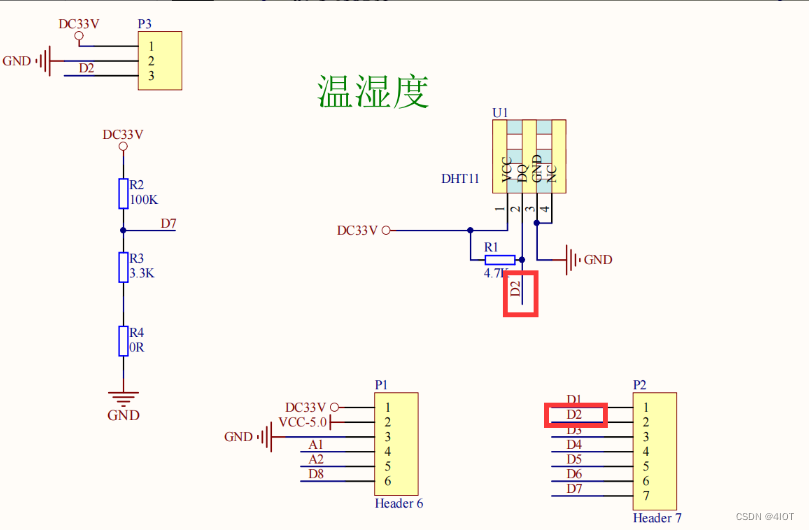
D2连接到核心板con2
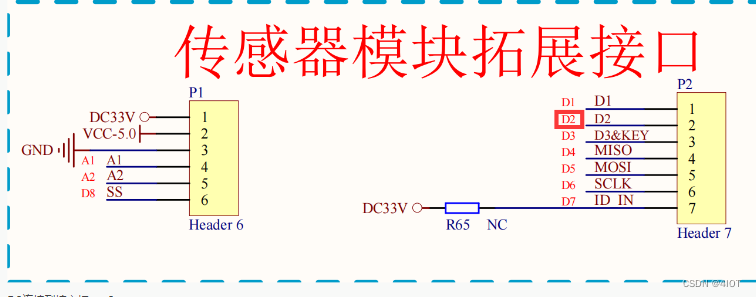 D2就是pb8
D2就是pb8
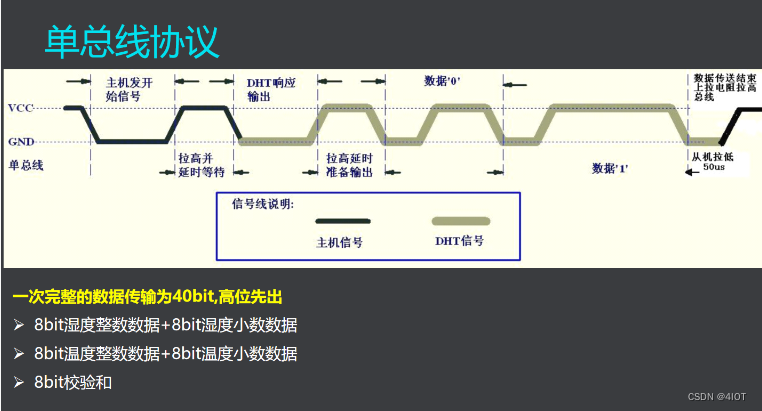
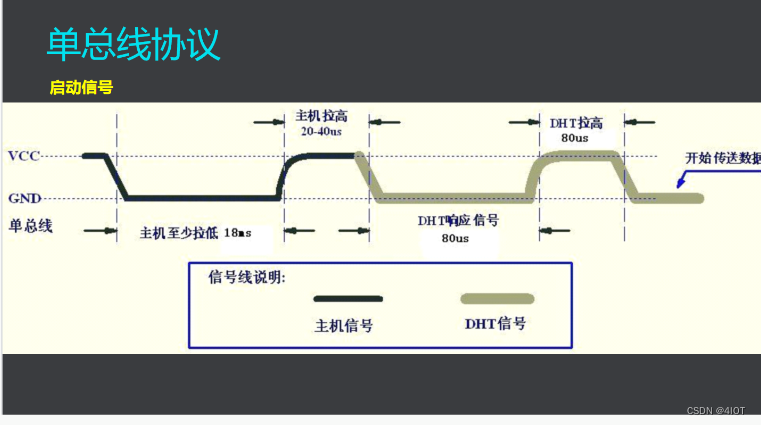
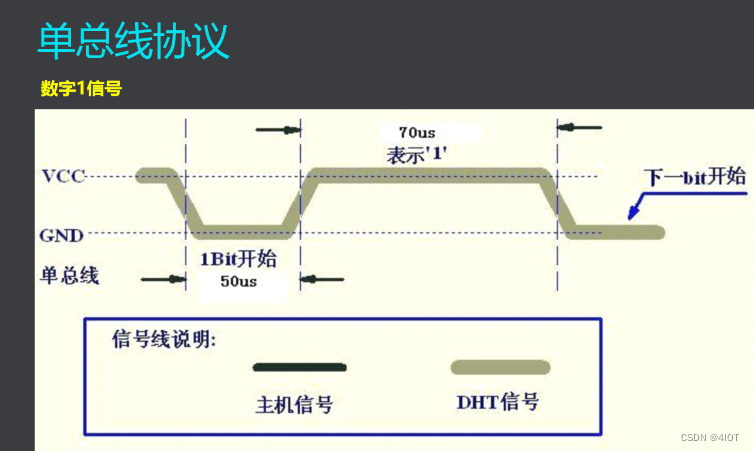
 2.2 驱动分析
2.2 驱动分析
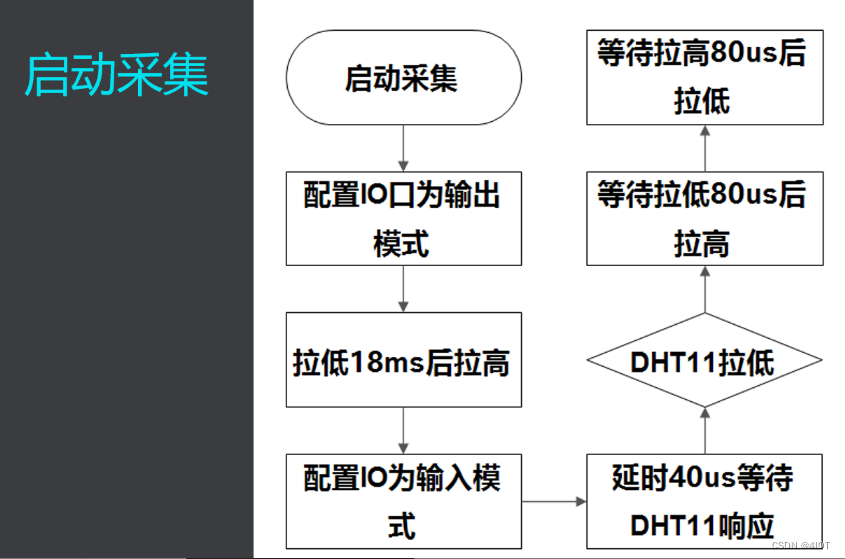
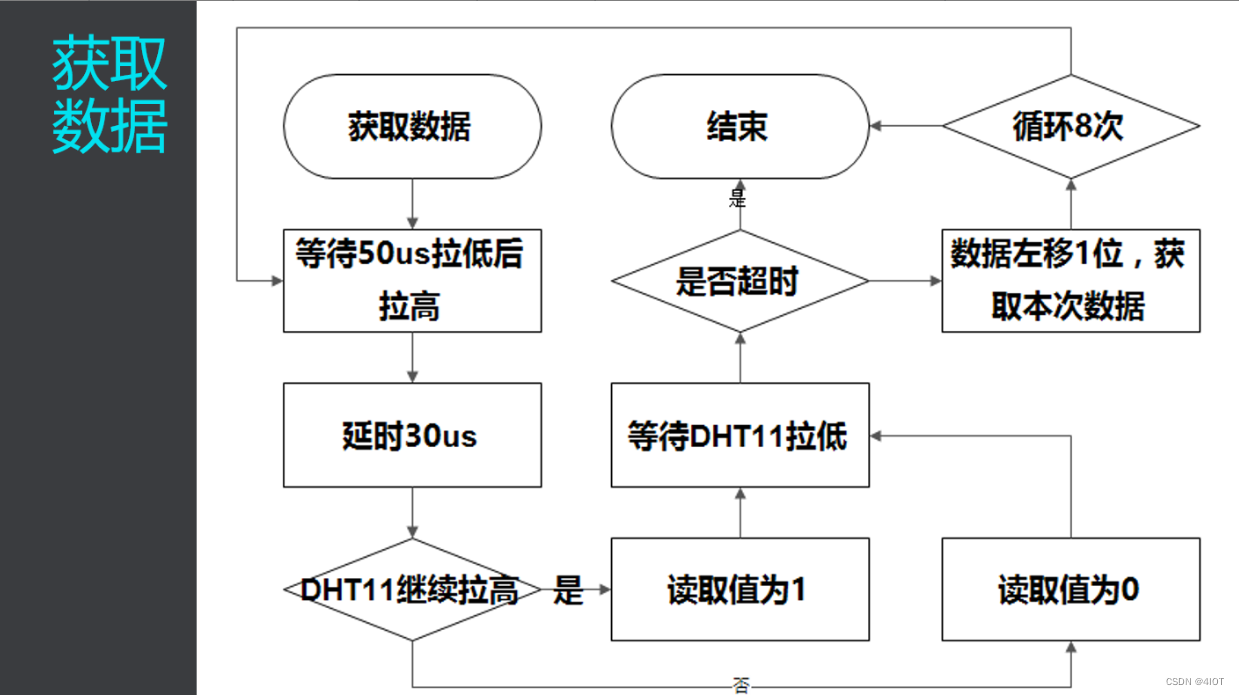
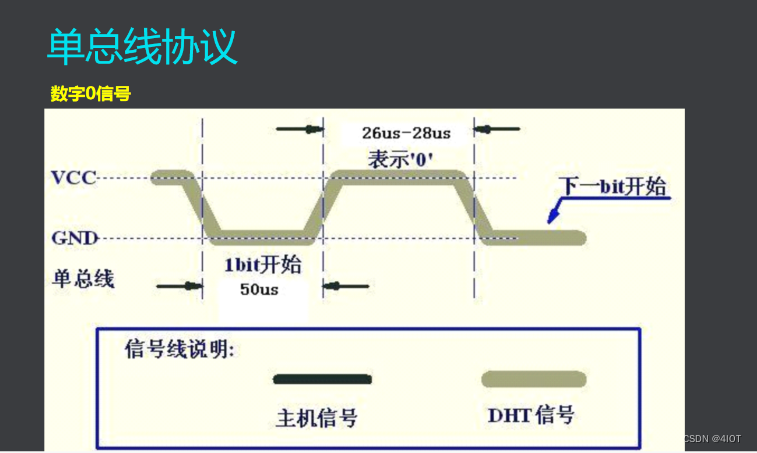
获取数据。
如果继续拉高就是70us说明时1,否则是0.
读取5个字节,获取稳定数据、湿度数据和校验码
2.3 修改工程代码
dh11.c
#include "stdint.h"
#include "tim.h"
#include "gpio.h"
#include "dht11.h"
#include "delay.h"//温湿度定义uint8_t ucharT_data_H=0,ucharT_data_L=0,ucharRH_data_H=0,ucharRH_data_L=0,ucharcheckdata=0;void DHT11_TEST(void) //温湿传感启动
{uint8_t ucharT_data_H_temp,ucharT_data_L_temp,ucharRH_data_H_humidity,ucharRH_data_L_humidity,ucharcheckdata_temp;uint8_t ucharFLAG = 0,uchartemp=0;uint8_t ucharcomdata;uint8_t i; {D2_OUT_GPIO_Init(); //根据时序图配置为输出模式,拉低等待18毫秒HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);HAL_Delay_ms(18);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET); //拉高,配置为输入模式,等待40usD2_IN_GPIO_Init();HAL_Delay_10us(4); }if(!HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8)) //如果响应信号是低电平 ,是否应答____{ucharFLAG=2; //无符号char型,超时保护,最多255,再+到0,如果=1设置为超时判断while((!HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))&&ucharFLAG++); //__--80us等待拉高ucharFLAG=2;while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8)&&ucharFLAG++); //--__80us等待拉低for(i=0;i<8;i++) //读取数据{ucharFLAG=2; while((!HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))&&ucharFLAG++); //判断是否拉高HAL_Delay_10us(3); //如果拉高延时30us等待磐石是否拉低uchartemp=0;if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))uchartemp=1; //如果还是高,代表1,否则代表0ucharFLAG=2;while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8)&&ucharFLAG++); //判断是否拉低,或者超时if(ucharFLAG==1)break; //无符号char型,超时保护,最多255,再+到0,如果=1设置为超时判断ucharcomdata<<=1; //左移1位ucharcomdata|=uchartemp; }ucharRH_data_H_humidity = ucharcomdata; //赋值给湿度高8位for(i=0;i<8;i++) {ucharFLAG=2; while((!HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))&&ucharFLAG++);HAL_Delay_10us(3);uchartemp=0;if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))uchartemp=1;ucharFLAG=2;while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8)&&ucharFLAG++); if(ucharFLAG==1)break; ucharcomdata<<=1;ucharcomdata|=uchartemp; }ucharRH_data_L_humidity = ucharcomdata; //赋值给湿度低8位for(i=0;i<8;i++) {ucharFLAG=2; while((!HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))&&ucharFLAG++);HAL_Delay_10us(3);uchartemp=0;if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))uchartemp=1;ucharFLAG=2;while((HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))&&ucharFLAG++); if(ucharFLAG==1)break; ucharcomdata<<=1;ucharcomdata|=uchartemp; }ucharT_data_H_temp = ucharcomdata; //赋值给温度高8位for(i=0;i<8;i++) {ucharFLAG=2; while((!HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))&&ucharFLAG++);HAL_Delay_10us(3);uchartemp=0;if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))uchartemp=1;ucharFLAG=2;while((HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))&&ucharFLAG++); if(ucharFLAG==1)break; ucharcomdata<<=1;ucharcomdata|=uchartemp; }ucharT_data_L_temp = ucharcomdata; //赋值给温度低8位for(i=0;i<8;i++) {ucharFLAG=2; while((!HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))&&ucharFLAG++);HAL_Delay_10us(3);uchartemp=0;if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))uchartemp=1;ucharFLAG=2;while((HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_8))&&ucharFLAG++); if(ucharFLAG==1)break; ucharcomdata<<=1;ucharcomdata|=uchartemp; }ucharcheckdata_temp = ucharcomdata; //读取校验和
// humiture=1; uchartemp=(ucharT_data_H_temp+ucharT_data_L_temp+ucharRH_data_H_humidity+ucharRH_data_L_humidity);if(uchartemp==ucharcheckdata_temp) //判断校验和是否和读取的数据相同{ ucharT_data_H = ucharT_data_H_temp; //进去赋值ucharT_data_L = ucharT_data_L_temp;ucharRH_data_H = ucharRH_data_H_humidity;ucharRH_data_L = ucharRH_data_L_humidity;ucharcheckdata = ucharcheckdata_temp; } } else //没用成功读取,返回0 {ucharT_data_H = 0;ucharT_data_L = 0;ucharRH_data_H = 0;ucharRH_data_L = 0; } HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); //重新调用systick的config,因为用到的延时毫秒和微妙都是systick,用完后要恢复}delay.c
#include "stm32f0xx_hal.h"
#include "delay.h"/*** @}*/
void HAL_Delay_10us(__IO uint32_t Delay)
{HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);uint32_t temp;uint8_t fac_us=60; SysTick->LOAD=Delay*fac_us; //时间加载 SysTick->VAL=0x00; //清空计数器SysTick->CTRL=0x01 ; //开始倒数 do{temp=SysTick->CTRL;}while(temp&0x01&&!(temp&(1<<16)));//等待时间到达 SysTick->CTRL=0x00; //关闭计数器SysTick->VAL =0X00; //清空计数器
}
/*** @}*/
void HAL_Delay_ms(__IO uint32_t Delay)
{HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);uint32_t temp;uint16_t fac_ms=6000; SysTick->LOAD=Delay*fac_ms; //时间加载 SysTick->VAL=0x00; //清空计数器SysTick->CTRL=0x01 ; //开始倒数 do{temp=SysTick->CTRL;}while(temp&0x01&&!(temp&(1<<16)));//等待时间到达 SysTick->CTRL=0x00; //关闭计数器SysTick->VAL =0X00; //清空计数器
}
/*** @}*/
void HAL_Delay_us(__IO uint32_t Delay)
{HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);uint32_t temp;uint8_t fac_us=6; SysTick->LOAD=Delay*fac_us; //时间加载 SysTick->VAL=0x00; //清空计数器SysTick->CTRL=0x01 ; //开始倒数 do{temp=SysTick->CTRL;}while(temp&0x01&&!(temp&(1<<16)));//等待时间到达 SysTick->CTRL=0x00; //关闭计数器SysTick->VAL =0X00; //清空计数器
} 

3 饲养环境控制

通过5v 二次回路AC驱动380风扇。试验里面采用了5v微型风扇
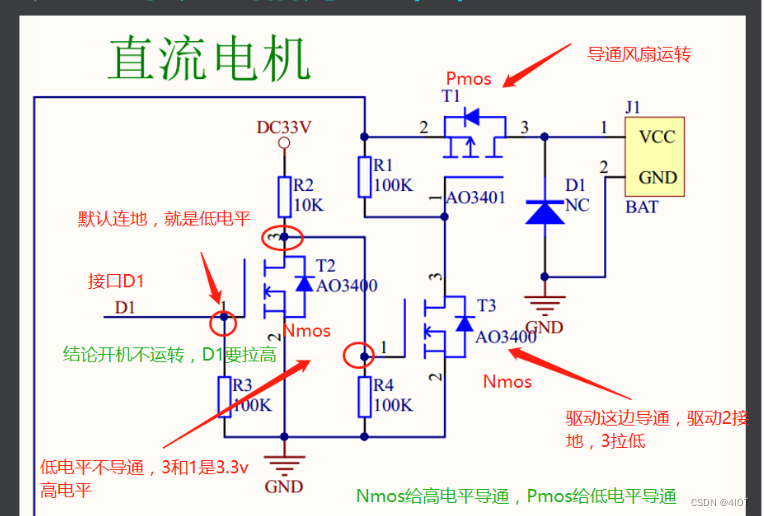
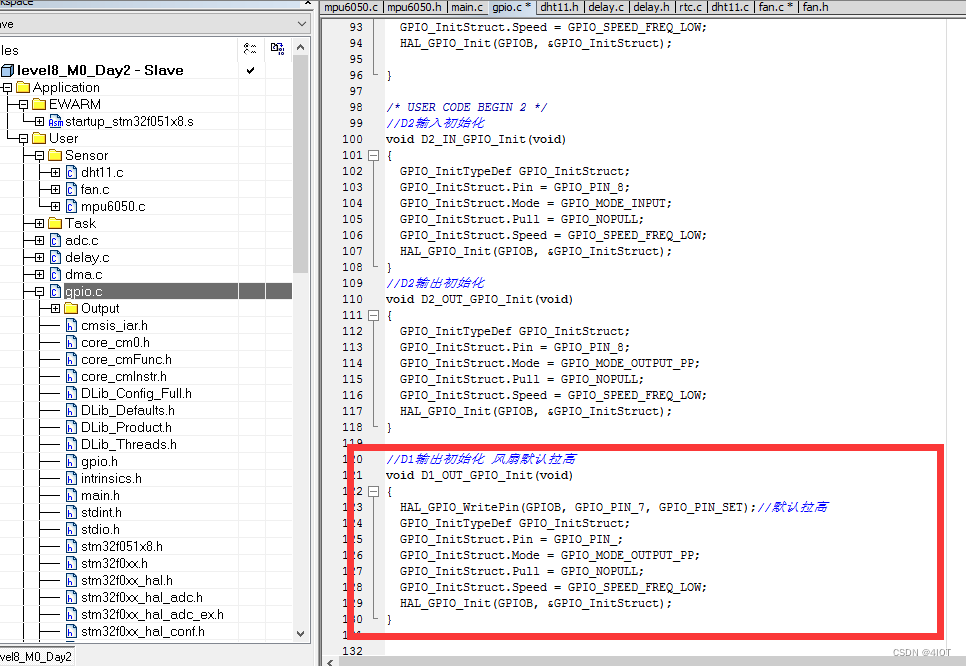
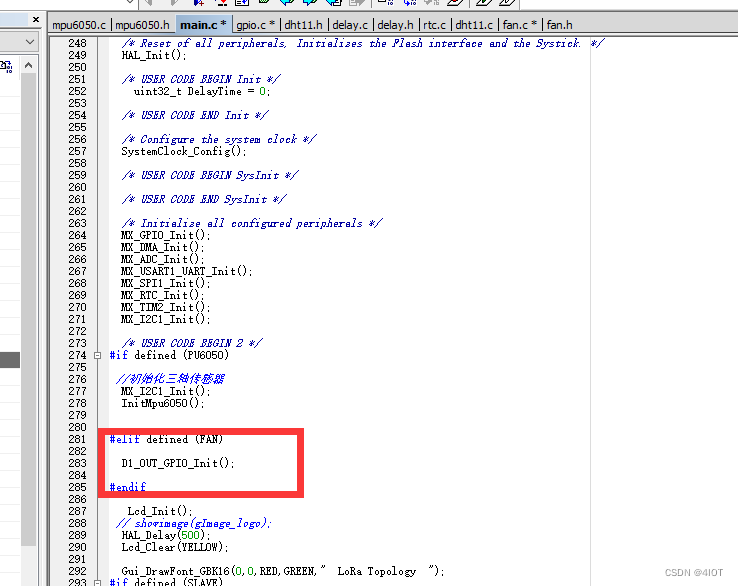
3.1 修改工程代码
gpio D1初始化
#include "gpio.h"
#include "fan.h"
#include <stdbool.h>static uint8_t FanStaus = false;//**********************************//
//函数名称: FanOn
//函数描述: 开启风扇
//函数参数: 无
//返回值: 无
//*******************************//void FanOn(void)
{HAL_GPIO_WritePin( FAN_GPIO_PORT, FAN_PIN, FAN_ON );FanStaus = true;
}//**********************************//
//函数名称: FanOff
//函数描述: 关闭风扇
//函数参数: 无
//返回值: 无
//*******************************//void FanOff(void)
{HAL_GPIO_WritePin( FAN_GPIO_PORT, FAN_PIN, FAN_OFF ); FanStaus = false;
}//**********************************//
//函数名称: FanReadStaus
//函数描述: 读取风扇状态
//函数参数: 无
//返回值: 无
//*******************************//uint8_t FanReadStaus( void )
{return FanStaus;
}主程序
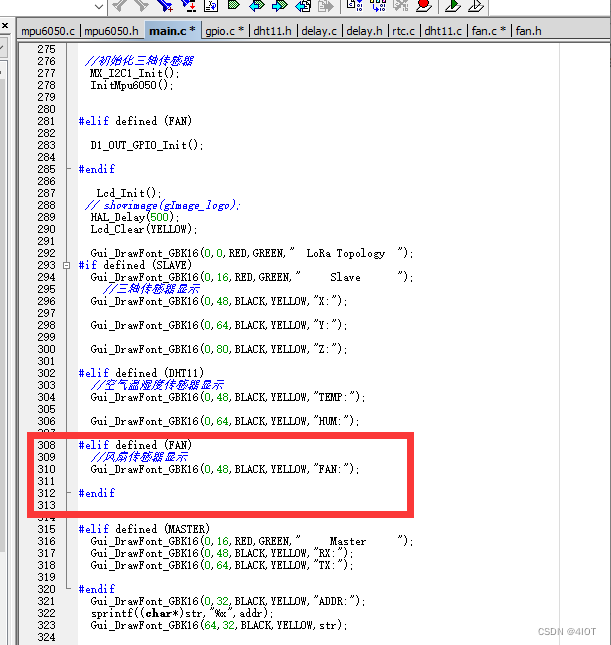
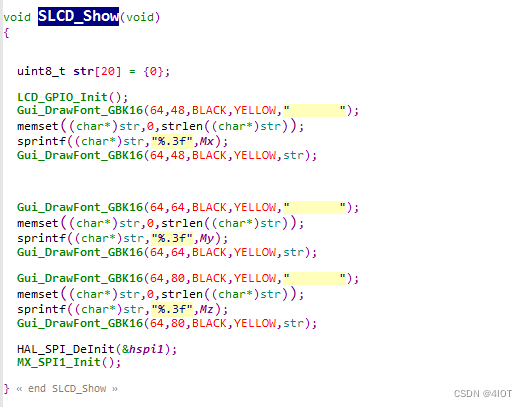
SLCD_SHOW
4 项目集成开发
定时采集上传数据
修改RTC文件
因为IIC,重新使用了cubmx,把IIC初始化更改了,要重新恢复
修改数据处理任务
传感器定时上传函数
把之前rtc文件复制过来
上传节点传感器函数,可以通过main函数查找,因为开发了3个设备的传感器,要进行区分。之前放在main函数的while1中
根据协议文件,修改数据包

修改上传代码
//**********************************//
//函数名称: SendSensorDataUP
//函数描述: 上传节点传感器数据
//函数参数: 无
//返回值: 无
//*******************************//void SendSensorDataUP(void)
{printf("SendSensorDataUP\n");//传感器类型6050
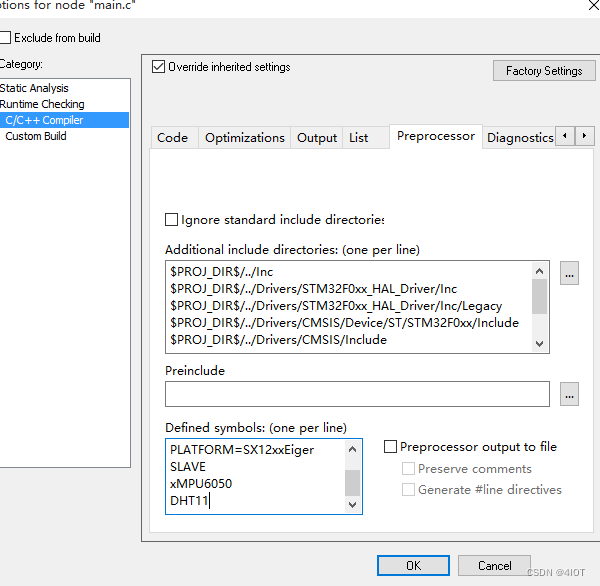
#if defined(MPU6050)mpu6050_ReadData(&Mx,&My,&Mz);printf("Mx = %.3f\n",Mx);printf("My = %3f\n",My);printf("Mz = %3f\n",Mz);DataPacke_t.netmsgHead = 'N';DataPacke_t.netPanid[0] = HI_UINT16(PAN_ID);DataPacke_t.netPanid[1] = LO_UINT16(PAN_ID);DataPacke_t.msgHead = 0x21;DataPacke_t.dataLength = 0x08; //不含包头DataPacke_t.dataType = 0x00;DataPacke_t.deviceAddr[0] = HI_UINT16(ADDR);DataPacke_t.deviceAddr[1] = LO_UINT16(ADDR);DataPacke_t.sensorType = 0x3;DataPacke_t.buff[0] = int8_t(Mx*10) //-127 128DataPacke_t.buff[1] = int8_t(My*10)DataPacke_t.buff[2] = int8_t(Mz*10)//校验码DataPacke_t.crcCheck = crc8((uint8_t *)&DataPacke_t,DataPacke_t.dataLength + 4);//发送数据包Radio->SetTxPacket((uint8_t *)&DataPacke_t, DataPacke_t.dataLength + 5);//传感器类型dht11
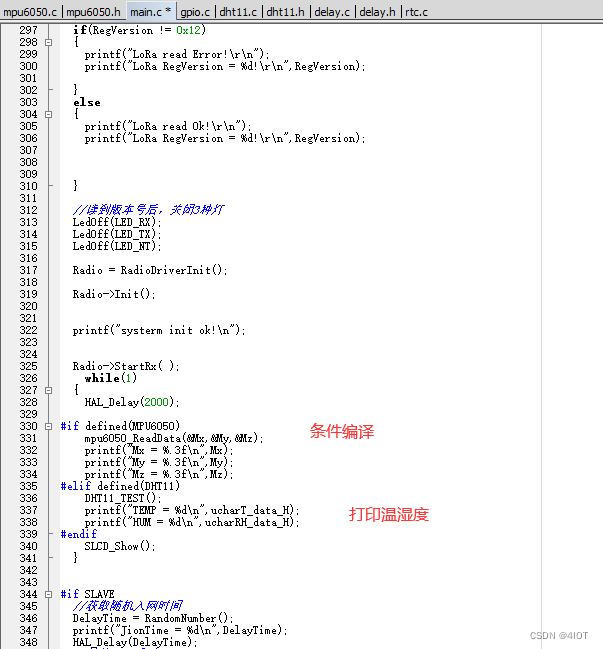
#if defined(DHT11)DHT11_TEST();printf("TEMP = %d\n",ucharT_data_H);printf("HUM = %d\n",ucharRH_data_H);DataPacke_t.netmsgHead = 'N';DataPacke_t.netPanid[0] = HI_UINT16(PAN_ID);DataPacke_t.netPanid[1] = LO_UINT16(PAN_ID);DataPacke_t.msgHead = 0x21;DataPacke_t.dataLength = 0x07; //不含包头DataPacke_t.dataType = 0x00;DataPacke_t.deviceAddr[0] = HI_UINT16(ADDR);DataPacke_t.deviceAddr[1] = LO_UINT16(ADDR);DataPacke_t.sensorType = 0x1;DataPacke_t.buff[0] = int8_t(ucharT_data_H) //-127 128DataPacke_t.buff[1] = int8_t(ucharRH_data_H)//校验码DataPacke_t.crcCheck = crc8((uint8_t *)&DataPacke_t,DataPacke_t.dataLength + 4);//发送数据包Radio->SetTxPacket((uint8_t *)&DataPacke_t, DataPacke_t.dataLength + 5);//传感器类型FAN
#if defined(FAN)FanStaus = FanReadStaus();DataPacke_t.netmsgHead = 'N';DataPacke_t.netPanid[0] = HI_UINT16(PAN_ID);DataPacke_t.netPanid[1] = LO_UINT16(PAN_ID);DataPacke_t.msgHead = 0x21;DataPacke_t.dataLength = 0x06; //不含包头DataPacke_t.dataType = 0x01;DataPacke_t.deviceAddr[0] = HI_UINT16(ADDR);DataPacke_t.deviceAddr[1] = LO_UINT16(ADDR);DataPacke_t.sensorType = 0x3;DataPacke_t.buff[0] = int8_t(FanStaus) //校验码DataPacke_t.crcCheck = crc8((uint8_t *)&DataPacke_t,DataPacke_t.dataLength + 4);//发送数据包Radio->SetTxPacket((uint8_t *)&DataPacke_t, DataPacke_t.dataLength + 5);#endif }修改解析代码
//**********************************//
//
//函数名称: SlaveProtocolAnalysis
//
//函数描述: 从机协议解析
//
//函数参数: uint8_t *buff,uint8_t len
//
//返回值: uint8_t
//
//*******************************//uint8_t SlaveProtocolAnalysis(uint8_t *buff,uint8_t len)
{uint8_t Crc8Data;printf("SlaveProtocolAnalysis\n");for (int i = 0; i < len; i++){printf("0x%x ",buff[i]);}printf("\n");if (buff[0] == NETDATA){if (buff[1] == HI_UINT16(PAN_ID) && buff[2] == LO_UINT16(PAN_ID)){Crc8Data = crc8(&buff[0], len - 1);if (Crc8Data != buff[len - 1]){memset(buff, 0, len);return 0;}if (buff[3] == 0x21){printf("Slave_NETDATA\n");if( buff[5] == 0x01){if(buff[6] == HI_UINT16(ADDR) && buff[7] == LO_UINT16(ADDR)){if(buff[8] == 0x03){
#if defined(FAN)if(buff[9] == true){FanON();}else{FanOff();}
#endif }}}}return 0;}}else if((buff[0] == 0x3C) && (buff[2] == 'A')){if (DataCrcVerify(buff, len) == 0){return 0;}if (buff[3] == HI_UINT16(PAN_ID) && buff[4] == LO_UINT16(PAN_ID)){if (buff[5] == jionPacke_t.deviceAddr[0] && buff[6] == jionPacke_t.deviceAddr[1]){slaveNativeInfo_t.deviceId = buff[7];printf("Slave_ACK\n");return 0xFF;}}}else if((buff[0] == 0x3C) && (buff[2] == 'T')){if (DataCrcVerify(buff, len) == 0){return 0;}if (buff[3] == HI_UINT16(PAN_ID) && buff[4] == LO_UINT16(PAN_ID)){uint32_t alarmTime = 0;startUpTimeHours = buff[5];startUpTimeMinute = buff[6];startUpTimeSeconds = buff[7];startUpTimeSubSeconds = buff[8] <<8 | buff[9];printf("Slave_CLOCK\n");printf("H:%d,M:%d,S:%d,SUB:%d\n", startUpTimeHours, startUpTimeMinute, startUpTimeSeconds, startUpTimeSubSeconds);alarmTime = ((DataUpTimeHours * 60 + DataUpTimeMinute) * 60 + DataUpTimeSeconds) * 1000 + (DataUpTimeSubSeconds / 2) + DataUpTime;GetTimeHMS(alarmTime, &DataUpTimeHours, &DataUpTimeMinute, &DataUpTimeSeconds, &DataUpTimeSubSeconds);printf("DataUpTime->H:%d,M:%d,S:%d,SUB:%d\n", DataUpTimeHours, DataUpTimeMinute, DataUpTimeSeconds, DataUpTimeSubSeconds);//使能RTCMX_RTC_Init();return 0xFF;}}return 1;
}CRC借用工具
这篇关于智慧牧场数据 7的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






