本文主要是介绍【C++进阶】红黑树的复仇(红与黑的爱恨厮杀),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

🪐🪐🪐欢迎来到程序员餐厅💫💫💫
主厨:邪王真眼
主厨的主页:Chef‘s blog
所属专栏:c++大冒险
总有光环在陨落,总有新星在闪烁
引言:
ps:建议先看过AVL树后再来学习红黑树:
带你手撕AVL树
一. 红黑树的概念
二 红黑树的性质
- 1. 每个结点不是红色就是黑色
- 2. 根节点是黑色的
- 3. 如果一个节点是红色的,则它的两个孩子结点是黑色的
- 4. 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点
- 5. 每个叶子结点都是黑色的(此处的叶子结点指的是空结点)
推导:
- 性质1不必多说
- 性质2与后面的旋转有关
- 性质3表明不能有连续的红色结点
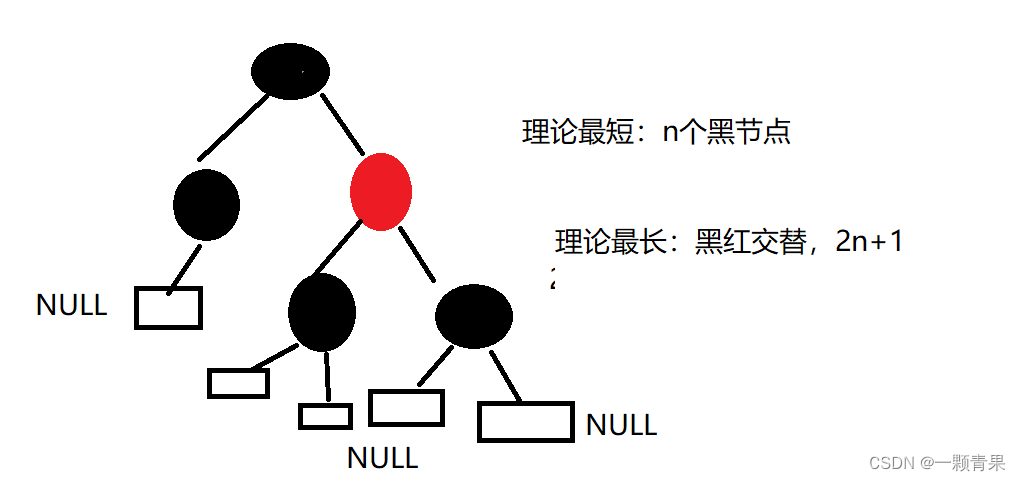
- 性质4表明理论最短路径就是纯黑节点路径
综上:
我们可以认为事先建造好一颗纯黑节点的满二叉树,再在两个黑节点之间插入红节点,则理论最长路径就是一黑一红交替,不超过最短路径的二倍。
三.红黑树的节点讲解及模拟
enum Color
{RED,BLACK
};
template<class K, class V>
struct RBTreeNode
{RBTreeNode<K, V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* _parent;pair<K, V> _kv;Color _col;RBTreeNode(pair<K, V>& kv = pair<K, V>()):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _col(RED)
};代码讲解:
- 1.我们枚举出了Color
- 2.除左右指针外,还有父亲指针,使得可以向上回溯
- 3.用pair对象存储K值V值
- 4.增加了颜色的成员变量,且默认颜色为红色
提问:
为什么结点的颜色初始化为红色呢?
回答:
因为插入新节点时(不为根部),如果插入黑色,一定破坏性质4,导致每条路径黑结点数目不同;而如果插入红色,有可能不会破坏性质3,所以结点初始化为红色。
四.红黑树模拟
4.1 成员变量
template<class K, class V>
class RBTree
{
protected:typedef RBTreeNode<K, V> Node;
public://函数
protected :Node* _root;
};4.2插入
与搜索二叉树以及AVL树相比,红黑树的默认成员函数和遍历相差不大,所以这里重点讲插入
4.2.1插入过程:
- 以普通二叉搜索树的方式进行插入
- 根据插入后的不同情况进行调整
bool Insert(pair<K, V>& kv){if (_root == nullptr){_root = new Node(val);return true;}else{Node* cur = _root;Node* parent = nullptrwhile (cur){parent = cur;if (cur->_val > val)cur = cur->left;else if (cur->_val < val)cur = cur->_right;elsereturn false;}cur = new Node(val);if (parent->_val.first > cur->_val.first){parent->_left = cur;}else{parent->_parent = cur;}cur->_parent = parent;///从此处开始进行插入后的调整while (parent && parent->_col == RED){Node* grandparent = parent->_parent;Node* uncle = nullptr;if (grandparent->_left == parent)uncle = grandparent->_right;elseuncle = grandparent->_left;if (uncle && uncle->_col == RED){parent->_col = BLACK;uncle->_col = BLACK;grandparent->_col = RED;cur = grandparent;parent = cur->_parent;}else if (grandparent->_left == parent){if (parent->_left = cur){RotateR(grandparent);grandparent->_col = RED;parent->_col = BLACK;}else{RotateL(parent);RotateR(grandparent);grandparent->_col = RED;cur->_col = BLACK;}}else{if (parent->_right = cur){RotateL(grandparent);grandparent->_col = RED;parent->_col = BLACK;}else{RotateR(parent);RotateL(grandparent);grandparent->_col = RED;cur->_col = BLACK;}}void RotateL(AVLNode * parent)//左旋{Node* grandparent = parent->_parent;Node* ChildR = parent->_right;if (grandparent){if (grandparent->_left == parent)grandparent->_left = ChildR;elsegrandparent->_right = ChildR;}else_root = ChildR;ChildR->_parent = grandparent;parent->_right = ChildR->_left;ChildR->_left->_parent = parent;ChildR->_left = parent;parent->_parent = ChildR;ChildR->_bf = parent->_bf = 0;}void RotateR(AVLNode * parent)//右旋{Node* grandparent = parent->_parent;Node* ChildL = parent->_left;if (grandparent){if (grandparent->_left == parent)grandparent->_left = ChildL;elsegrandparent->_right = ChildL;}else_root = ChildL;ChildL->_parent = grandparent;//两两一组进行改变parent->_left = ChildL->_right;ChildL->_right->_parent = parent;ChildL->_right = parent;parent->_parent = ChildL;//ChildL->_bf = parent->_bf = 0;}void RotateRL(AVLNode * parent)//双旋,先右旋在左旋{Node* ChildR = parent->_right;int bf = ChildR->_left->_bf;RotateR(ChildR);RotateL(parent);if (bf == 0){parent->_bf = 0;ChildR->_bf = 0;ChildR->_left->_bf = 0;}else if (bf == 1){parent->_bf = -1;ChildR->_bf = 0;ChildR->_left->_bf = 0;}else if (bf == -1){parent->_bf = 0;ChildR->_left->_bf = 0;ChildR->_bf = 1;}else{assert(false);}}void RotateLR(AVLNode * parent)//双旋,先左旋,再右旋{Node* ChildL = parent->_left;int bf = ChildL->_right->_bf;RotateR(ChildL);RotateL(parent);if (bf == 0){parent->_bf = 0;ChildL->_bf = 0;ChildL->_right->_bf = 0;}else if (bf == 1){parent->_bf = 0;ChildL->_bf = -1;ChildL->_right->_bf = 0;}else if (bf == -1){parent->_bf = 1;ChildL->_right->_bf = 0;ChildL->_bf = 0;}else{assert(false);}}void Inorde(AVLNode * root, vector<pair<K, V>>&v){if (root == nullptr)return;Inorde(root->_left, v);v.push_back(root->_val);Inorde(root->_right, v);}}}}插入后调整的分析:
- 1.像AVL树一样,大框架也是向上回溯,判断循环进行条件是父亲节点不为空且父亲节点颜色为红,.因为新节点的默认颜色是红色,如果其双亲节点的颜色是黑色,没有违反红黑树任何 性质,则不需要调整;
- 2当新插入节点的双亲节点颜色为红色时,就违反了性质三不能有连在一起的红色节点,此时需要对红黑树分情况来讨论:cur为当前节点,p为父节点,g为祖父节点,u为叔叔节点
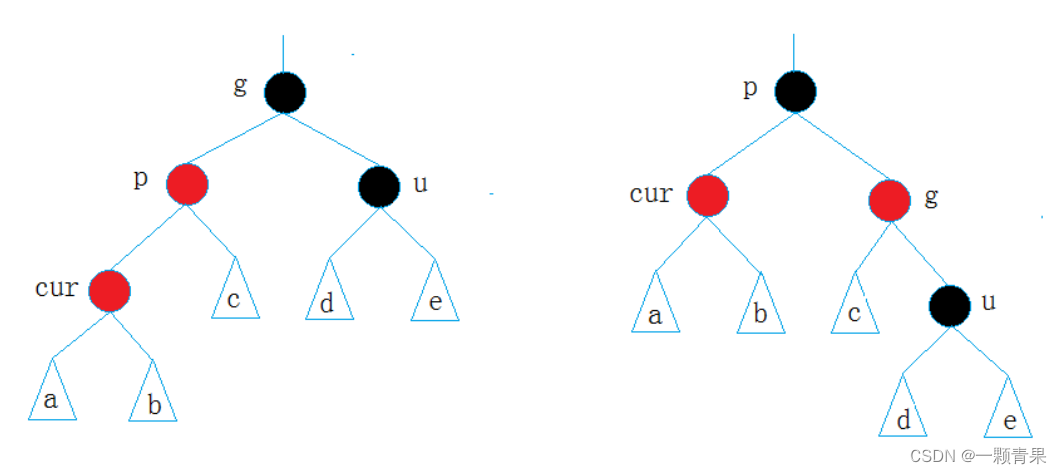
🍒🍒4.2.2情况一:
cur为红,p为红,g为黑,u存在且为红

🍒🍒4.2.3情况二:
cur为红,p为红,g为黑,u不存在/u存在且为黑,p是g的左孩子,cur是p的左孩子
解决方案:
- 先对grandparent进行右单旋
- 再将parent变黑,grandparent变红
🍒🍒4.2.4情况三
cur为红,p为红,g为黑,u不存在/u存在且为黑,p是g的左孩子,cur是p的右孩子
重点提醒:
可以发现左单旋后就变成了情况二
解决方案:
- 先对parent进行左单旋
- 再对grandparent进行右单旋
- 最后将cur变黑,grandparent变红,这里将cur变黑而不是parent是因为左单旋后cur取代了parent的位置

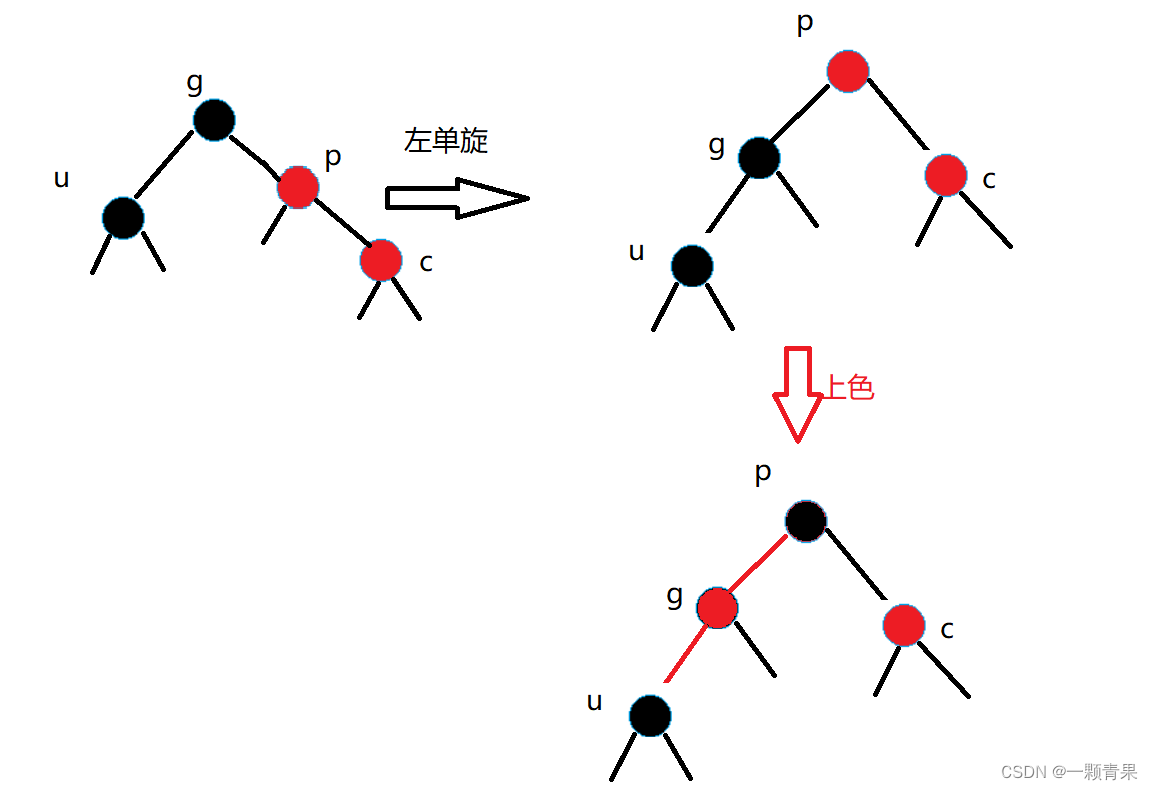
🍒🍒4.2.5情况四:
cur为红,p为红,g为黑,u不存在/u存在且为黑,p是g的右孩子,cur是p的右孩子
解决方案:
- 先对grandparent进行左单旋
- 再将parent变黑,grandparent变红
🍒🍒4.2.6情况五:
cur为红,p为红,g为黑,u不存在/u存在且为黑,p是g的右孩子,cur是p的左孩子
重点提醒:
可以发现右单旋后就变成了情况四
解决方案:
- 先对parent进行右单旋
- 再对grandparent进行左单旋
- 最后将cur变黑,grandparent变红,这里将cur变黑而不是parent是因为左单旋后cur取代了parent的位置

5.红黑树的验证
1. 检测其是否满足二叉搜索树(中序遍历是否为有序序列)
void Inorde(AVLNode * root, vector<pair<K, V>>&v)
{if (root == nullptr)return;Inorde(root->_left, v);v.push_back(root->_val);Inorde(root->_right, v);
}2. 检测其是否满足红黑树的性质
bool IsBalance(Node*root)
{//空树也是红黑树if (root == nullptr)return true;//违反性质2if (root->_col == RED){cout << "树的根节点应该是黑色,可该树却是红色" << endl;return false;}//计算一条路径黑节点数量Node* cur = root;int num = 0;while (cur){if (cur->_col == BLACK)num++;cur = cur->_left;}return _IsBlance(root, num);
}
IsBalance(Node* root, size_t num, size_t cur_num)
{if (root == nullptr){//违反性质4if (num != cur_num){cout << "对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点,但该树却不是" << endlreturn false;}elsereturn true;}if (root->_col == BLACK)num++;//违反性质3if (root->_parent && root->_parent == RED && root->_col == RED){cout << "如果一个节点是红色的,则它的两个孩子结点是黑色的,可该树却出现了连续的红色节点" << endl;return false;}return IsBalance(root->_left, num, cur_num) && IsBalance(root->_right, num, cur_num);
}6. 红黑树与AVL树的比较
7. 红黑树的应用
- 1. C++ STL库 -- map/set、mutil_map/mutil_set
- 2. Java 库
- 3. linux内核
- 4. 其他一些库
创作不易,点赞关注支持一下吧

这篇关于【C++进阶】红黑树的复仇(红与黑的爱恨厮杀)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





