本文主要是介绍(4)(4.3) Kogger Sonar,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
前言
1 推荐硬件
2 配置回声探测仪模块
3 连接ArduPilot硬件
4 参数说明
前言
KOGGER 声纳(KOGGER Sonar)是一款结构紧凑、成本低廉的水下回声测深仪模块,带有 UART 接口,电源电压为 5-14v。

1 推荐硬件
CP210x USB->UART 转换器和安装了 Kogger 应用程序(Kogger Application)的 Windows PC。
2 配置回声探测仪模块
在将模块连接到 ArduPilot 之前,应对其进行配置。您需要将 KOGGER 声纳模块连接到计算机上。图形用户界面是开源的 Kogger 应用程序(Kogger Application)。
1. 在图形用户界面中进行以下调整:

2. 选择指定的 COM 端口并按绿色 RUN(运行)按钮。
3. 设置以下测距仪参数:
- Max distance = 50000;
- Dead zone = 100;
- Confidence = 0。
4. 设置以下传感器参数:
- Pulse count = 10;
- Frequency = 700kHz;
- Booster = ON。
5. 设置以下数据集参数。
- Period = 100ms;
- Rangefinder = NMEA。
6. 按"闪光灯设置"键。
就是这样。该模块即可与自动驾驶仪配合使用。
3 连接ArduPilot硬件
KOGGER 声纳通过串行/uart 接口使用 NMEA 协议进行距离测量。
如果使用 SERIAL2 (TELEM2),则应设置以下参数:

传感器可以连接到自动驾驶仪上任何可用的串行/uart 端口。在下图中,第一个传感器连接到 SERIAL2 (TELEM2)。
- SERIAL2_PROTOCOL = 9 (Lidar);
- SERIAL2_BAUD = 115 (115200 baud)。
然后应设置以下测距仪相关参数:
- RNGFND1_TYPE = 17 (NMEA);
- RNGFND1_MIN_CM = 30;
- RNGFND1_MAX_CM = 50000(即 50m)。这是测距仪能够可靠读取的距离,单位为厘米;
- RNGFND1_ORIENT = 25(即向下),如果安装在船上。
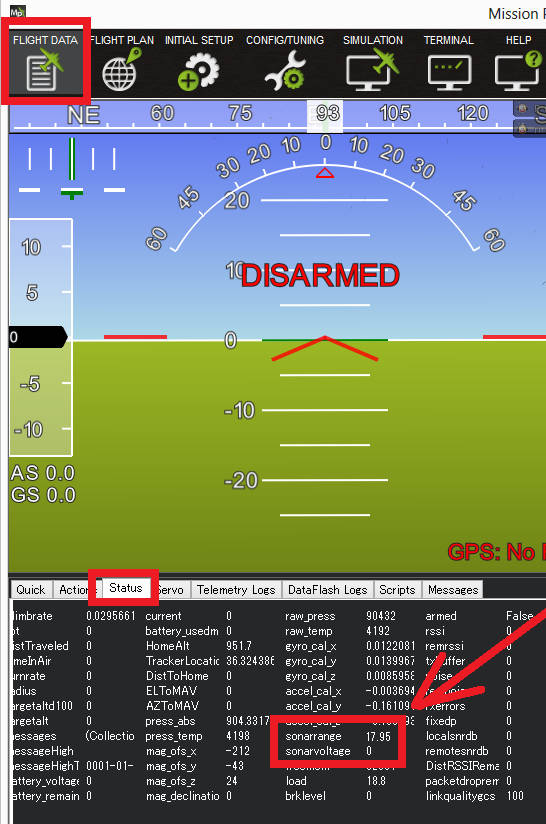
测试传感器
传感器读取的距离可在Mission Planner飞行数据屏幕的状态选项卡中查看。仔细查看"sonarrange"(声纳范围)。
4 参数说明
1、SERIAL2_PROTOCOL:串行2协议选择
注意:更改后需要重新启动。
控制 Serial2 端口应使用何种协议。请注意,Frsky 选项需要外部转换器硬件。详情请查看维基百科。
| Values | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2、RNGFND1_TYPE:测距仪类型
连接测距仪的类型。
| Values | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
这篇关于(4)(4.3) Kogger Sonar的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





