本文主要是介绍IPC网络摄像头媒体视屏流MI_VPE模块结构体,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
VPE模块相关数据类型定义如下:

VPE模块错误码如下:

=======================
MI_VPE_CHANNEL 结构体
函数说明
定义:MI_VPE_CHANNEL类型。
定义; typedef MI_S32 MI_VPE_CHANNEL
注意事项:无
相关数据类型及接口:无
---------------------------------
MI_VPE_PORT 结构体
函数说明
定义:MI_VPE_PORT类型。
定义:typedef MI_S32 MI_VPE_PORT
注意事项:无
相关数据类型及接口:无
--------------------------------
MI_VPE_RunningMode_e 结构体
定义VPE工作在某种模式下
typedef enum
{E_MI_VPE_RUN_INVALID = 0x00,E_MI_VPE_RUN_DVR_MODE = 0x01,E_MI_VPE_RUN_CAM_TOP_MODE = 0x02,E_MI_VPE_RUN_CAM_BOTTOM_MODE = 0x04,E_MI_VPE_RUN_CAM_MODE =E_MI_VPE_RUN_CAM_TOP_MODE|E_MI_VPE_RUN_CAM_BOTTOM_MODE,E_MI_VPE_RUN_REALTIME_TOP_MODE = 0x08,E_MI_VPE_RUN_REALTIME_BOTTOM_MODE = 0x10,E_MI_VPE_RUN_REALTIME_MODE =E_MI_VPE_RUN_REALTIME_TOP_MODE | E_MI_VPE_RUN_REALTIME_BOTTOM_MODE,E_MI_VPE_RUNNING_MODE_MAX,
} MI_VPE_RunningMode_e;使用注意:
E_MI_VPE_RUN_DVR_MODE:当输入是YUV 格式时,ISP bypass, 不经过ISP 处理。

E_MI_VPE_RUN_CAM_MODE:当输入是Bayer 格式时,且数据来自DRAM, ISP 支持分时复用,例如多sensor
场景。

E_MI_VPE_RUN_REALTIME_MODE:当输入是Bayer 格式,VIF 和ISP 之间硬件直连,ISP 不支持分时复用,
只支持一个通道,例如单sensor 场景。

-----------------------------------------------------
MI_VPE_SensorChannel_e 结构体
typedef enum
{E_MI_VPE_SENSOR_INVALID = 0,E_MI_VPE_SENSOR0,E_MI_VPE_SENSOR1,E_MI_VPE_SENSOR2,E_MI_VPE_SENSOR3,E_MI_VPE_SENSOR_MAX
}MI_VPE_SensorChannel_e;
使用注意:
与硬件上sensor Pad0/1/2/3 对应,当vpe前端不接sensor的时候使用E_MI_VPE_SENSOR_INVALID。
------------------------------------------------------
MI_VPE_ChnPortMode_e 结构体
定义VPE channel中每一个port的输出效果模式。
typedef enum
{E_MI_VPE_ZOOM_LDC_NULL,E_MI_VPE_ZOOM_LDC_PORT0 = 0X01,E_MI_VPE_ZOOM_LDC_PORT1 = 0X02,E_MI_VPE_ZOOM_LDC_PORT2 = 0X04,E_MI_VPE_ZOOM_LDC_MAX = E_MI_VPE_ZOOM_LDC_PORT0|E_MI_VPE_ZOOM_LDC_PORT1|E_MI_VPE_ZOOM_LDC_PORT2,
}MI_VPE_ChnPortMode_e;
port0,1,2 输出包含zoom/ldc 效果。-------------------------------------------------------
MI_VPE_IspApiHeader_t 结构体
定义VPE传给ISP 的数据信息。
typedef struct MI_VPE_IspApiHeader_s
{MI_U32 u32HeadSize; //Size of MIIspApiHeader_tMI_U32 u32DataLen; //Data length;MI_U32 u32CtrlID; //Function IDMI_U32 u32Channel; //Isp channel numberMI_S32 s32Ret; //Isp api retuen value
} MI_VPE_IspApiHeader_t;--------------------------------------------------
MI_VPE_ChannelAttr_t 结构体
定义 VPE channel静态属性
typedef struct MI_VPE_ChannelAttr_s
{MI_U16 u16MaxW;MI_U16 u16MaxH;MI_SYS_PixelFormat_e ePixFmt;MI_VPE_SensorChannel_e eSensorBindId;MI_BOOL bNrEn;MI_BOOL bEdgeEn;MI_BOOL bEsEn;MI_BOOL bContrastEn;MI_BOOL bUvInvert;MI_BOOL bRotation;MI_VPE_RunningMode_e eRunningMode;MI_VPE_IspInitPara_t tIspInitPara;MI_BOOL bEnLdc;MI_U32 u32ChnPortMode;
}MI_VPE_ChannelAttr_t;成员包括:


-------------------------------------
MI_VPE_PqParam_t 结构体
定义 VPE channel属性参数
typedef struct MI_VPE_ChannelPara_s
{MI_U8 u8NrcSfStr; //0 ~ 255;MI_U8 u8NrcTfStr; //0 ~ 255MI_U8 u8NrySfStr; //0 ~ 255MI_U8 u8NryTfStr; //0 ~ 255MI_U8 u8NryBlendMotionTh; //0 ~ 15MI_U8 u8NryBlendStillTh; //0 ~ 15MI_U8 u8NryBlendMotionWei; //0 ~ 31MI_U8 u8NryBlendOtherWei; //0 ~ 31MI_U8 u8NryBlendStillWei; //0 ~ 31MI_U8 u8EdgeGain[6];//0~255MI_U8 u8Contrast;//0~255
} MI_VPE_ChannelPara_t;成员包括:
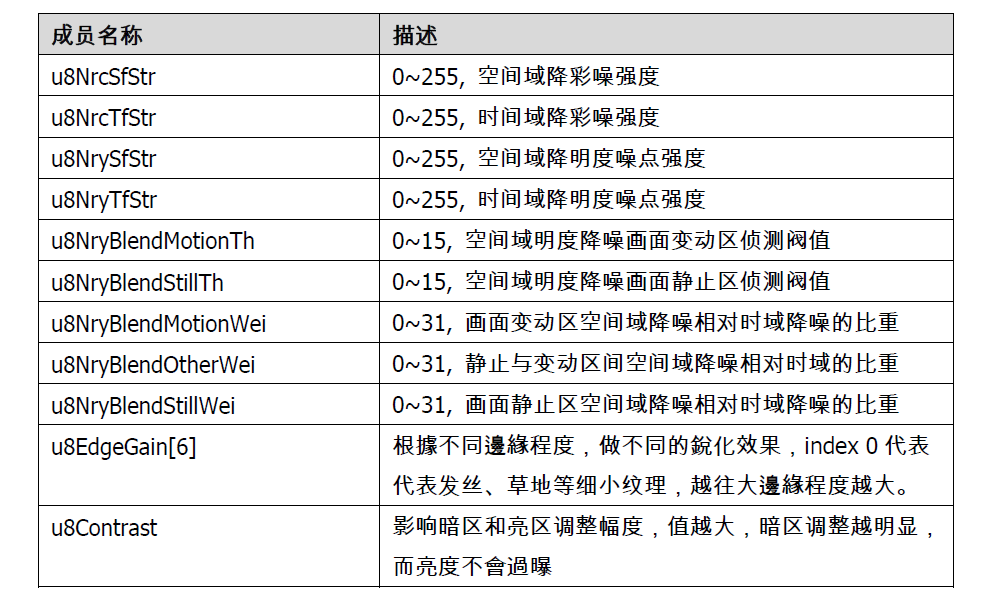
使用注意:
BLEND_WEI 数值愈大空间域去噪点强度愈强,建议针对画面动态区设较强的值可达到较好的去噪点效果;针对静止区设定较弱的值,可保留较多细节
-------------------------------------
MI_VPE_HDRType_e 结构体
定义VPE是否开HDR,开HDR是使用哪种方式
typedef enum
{E_MI_VPE_HDR_TYPE_OFF,E_MI_VPE_HDR_TYPE_VC, //virtual channel mode HDR,vc0->long, vc1->shortE_MI_VPE_HDR_TYPE_DOL,E_MI_VPE_HDR_TYPE_EMBEDDED, //compressed HDR modeE_MI_VPE_HDR_TYPE_LI, //Line interlace HDRE_MI_VPE_HDR_TYPE_MAX
} MI_VPE_HDRType_e使用注意:
具体使用哪一种HDR Type 可以通过MI_SNR_GetPadInfo 接口获取。
--------------------------------------
MI_VPE_3DNR_Level_e 结构体
定义VPE开启3DNR 等级
typedef enu
{E_MI_VPE_3DNR_LEVEL_OFF,E_MI_VPE_3DNR_LEVEL1,E_MI_VPE_3DNR_LEVEL2,E_MI_VPE_3DNR_LEVEL3,E_MI_VPE_3DNR_LEVEL4,E_MI_VPE_3DNR_LEVEL5,E_MI_VPE_3DNR_LEVEL6,E_MI_VPE_3DNR_LEVEL7,E_MI_VPE_3DNR_TYPE_NUM
} MI_VPE_3DNR_Level_e;使用注意:
Create channel 后设置,为静态属性只能设置一次。
有关3DNR等级,会导致部分3DNR API参数(NR3D_PARAM_t)无法使用,请参考下表

---------------------------------------
MI_VPE_ChannelPara_t 结构体
typedef struct MI_VPE_ChannelPara_s
{MI_VPE_PqParam_t stPqParam; // only dvr useMI_VPE_HDRType_e eHDRType;MI_VPE_3DNR_Level_e e3DNRLevel;MI_BOOL bMirror;MI_BOOL bFlip;MI_BOOL bWdrEn; //Wdr on/offMI_BOOL bEnLdc;
} MI_VPE_ChannelPara_t;成员包括:

使用注意:

- 不同chip 支持的最大3dnr level如上表, 设置超过MAX, 内部自动采用MAX Level,Level越高3DNR 强度越强,消耗的buffer也会多一点。
- 支持的eHDRType 可以通过MI_SNR_GetPadInfo 查询。
- stPqParam 仅DVR mode 可用。
- bMirror/ bFlip 支持芯片系列如上表, 预防某些Sensor不支持翻转。
--------------------------------------
MI_VPE_RegionInfo_t 结构体
定义VPE通道区域统计信息
typedef struct MI_VPE_RegionInfo_s
{MI_VPE_Region_t *pstRegion; // region attributeMI_U32 u32RegionNum; // count of the region
} MI_VPE_RegionInfo_t;成员包括:

----------------------------------------
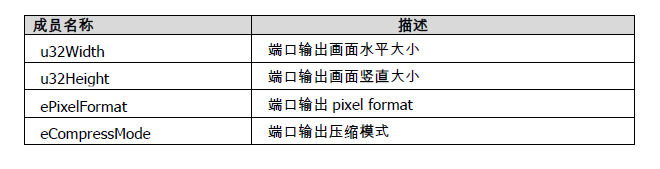
MI_VPE_PortMode_t 结构体
定义 VPE 端口模式
typedef struct MI_VPE_PortMode_s
{MI_U32 u32Width; // Width of target imageMI_U32 u32Height; // Height of target imageMI_SYS_PixelFormat_e ePixelFormat; // Pixel format of target imageMI_SYS_CompressMode_e eCompressMode; // Compression mode of the output
}MI_VPE_PortMode_t;成员包括:
---------------------------------------
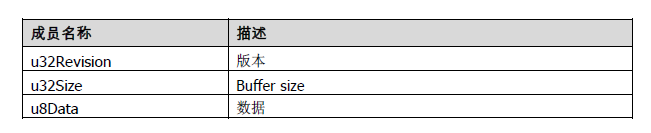
MI_VPE_IspInitPara_t 结构
定义VPE ISP初始参数Buffer
typedef struct MI_VPE_IspInitPara_s
{MI_U32 u32Revision;MI_U32 u32Size;MI_U8 u8Data[64];
}MI_VPE_IspInitPara_t;成员包括:
这篇关于IPC网络摄像头媒体视屏流MI_VPE模块结构体的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






