本文主要是介绍【JAVA重要知识 | 第九篇】ConCurrentHashMap源码分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

文章目录
- 9.ConCurrentHashMap源码分析
- 9.1 ConCurrentHashMap 1.7
- 9.1.1存储结构
- 9.1.2初始化
- 9.1.3put流程
- (1)判断是否要put(key,value)流程
- (2)put(key,value)
- (3)自旋获取hash位置的HashEntry
- 9.1.4 rehash扩容
- 9.2ConcurrentHashMap 1.8
- 9.2.1存储结构
- 9.2.2初始化
- 9.2.3put流程
- 9.3总结
9.ConCurrentHashMap源码分析
9.1 ConCurrentHashMap 1.7
9.1.1存储结构
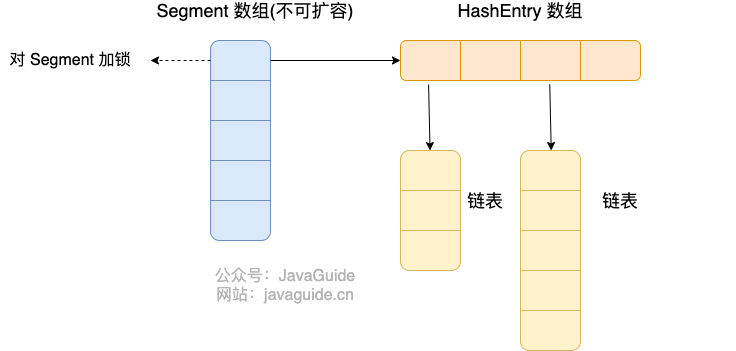
- Java 7 中
ConcurrentHashMap的存储结构如上图,ConcurrnetHashMap由很多个Segment数组组合 - 每一个
Segment指向一个HashEntry对象的数组,一个类似于HashMap的结构,所以每一个HashMap的内部可以进行扩容。 - 但是
Segment的个数一旦 初始化就不能改变,默认Segment的个数是 16 个,你也可以认为ConcurrentHashMap默认支持最多 16 个线程并发
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-d9OyrYIw-1643030217441)(C:\Users\noblegasesgoo\AppData\Roaming\Typora\typora-user-images\image-20211106094938292.png)]](https://img-blog.csdnimg.cn/img_convert/768a5d3bd409a974085eb7803f919cda.png)
9.1.2初始化
通过 ConcurrentHashMap 的无参构造探寻 ConcurrentHashMap 的初始化流程。
/*** Creates a new, empty map with a default initial capacity (16),* load factor (0.75) and concurrencyLevel (16).*/public ConcurrentHashMap() {this(DEFAULT_INITIAL_CAPACITY, DEFAULT_LOAD_FACTOR, DEFAULT_CONCURRENCY_LEVEL);}
无参构造中调用了有参构造,传入了三个参数的默认值,他们的值是。
- 初始容量,这个值指的是整个 ConcurrentHashMap 的初始容量,实际操作的时候需要平均分给每个 Segment。
- 比如你初始容量是 64,**Segment *的容量为*16,那么每个段中哈希表的初始容量就为 64/16=4。
/*** 默认初始化容量*/static final int DEFAULT_INITIAL_CAPACITY = 16;/*** 默认负载因子*/static final float DEFAULT_LOAD_FACTOR = 0.75f;/*** 默认并发级别*/static final int DEFAULT_CONCURRENCY_LEVEL = 16;
接着看下这个有参构造函数的内部实现逻辑。
@SuppressWarnings("unchecked")
public ConcurrentHashMap(int initialCapacity,float loadFactor, int concurrencyLevel) {// 参数校验if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0)throw new IllegalArgumentException();// 校验并发级别大小,大于 1<<16,重置为 65536if (concurrencyLevel > MAX_SEGMENTS)concurrencyLevel = MAX_SEGMENTS;// Find power-of-two sizes best matching arguments// 2的多少次方int sshift = 0;int ssize = 1;// 这个循环可以找到 concurrencyLevel 之上最近的 2的次方值while (ssize < concurrencyLevel) {++sshift;ssize <<= 1;}// 记录段偏移量this.segmentShift = 32 - sshift;// 记录段掩码this.segmentMask = ssize - 1;// 设置容量if (initialCapacity > MAXIMUM_CAPACITY)initialCapacity = MAXIMUM_CAPACITY;// c = 容量 / ssize ,默认 16 / 16 = 1,这里是计算每个 Segment 中的类似于 HashMap 的容量int c = initialCapacity / ssize;if (c * ssize < initialCapacity)++c;int cap = MIN_SEGMENT_TABLE_CAPACITY;//Segment 中的类似于 HashMap 的容量至少是2或者2的倍数while (cap < c)cap <<= 1;// create segments and segments[0]// 创建 Segment 数组,设置 segments[0]Segment<K,V> s0 = new Segment<K,V>(loadFactor, (int)(cap * loadFactor),(HashEntry<K,V>[])new HashEntry[cap]);Segment<K,V>[] ss = (Segment<K,V>[])new Segment[ssize];UNSAFE.putOrderedObject(ss, SBASE, s0); // ordered write of segments[0]this.segments = ss;
}
总结一下在 Java 7 中 ConcurrentHashMap 的初始化逻辑。
- 必要参数校验——初始化容量、负载因子、并发级别若小于0,则抛出参数检验异常
- 校验并发级别
concurrencyLevel大小,如果大于最大值,重置为最大值。无参构造默认值是 16. - 寻找并发级别
concurrencyLevel之上最近的 2 的幂次方值,作为初始化容量大小,默认是 16。 - 记录
segmentShift偏移量,这个值为【容量 = 2 的 N 次方】中的 N,在后面 Put 时计算位置时会用到。默认是 32 - sshift = 28. - 记录
segmentMask,默认是 ssize - 1 = 16 -1 = 15. - 初始化
segments[0],默认大小为 2,负载因子 0.75,扩容阀值是 2*0.75=1.5,插入第二个值时才会进行扩容 - ConcurrentHashMap 初始化的时候会初始化 第一个桶segment[0] ;对于其他桶来说,在插入第一个值的时候进行初始化。
9.1.3put流程
(1)判断是否要put(key,value)流程
/*** Maps the specified key to the specified value in this table.* Neither the key nor the value can be null.** <p> The value can be retrieved by calling the <tt>get</tt> method* with a key that is equal to the original key.** @param key key with which the specified value is to be associated* @param value value to be associated with the specified key* @return the previous value associated with <tt>key</tt>, or* <tt>null</tt> if there was no mapping for <tt>key</tt>* @throws NullPointerException if the specified key or value is null*/
public V put(K key, V value) {Segment<K,V> s;if (value == null)throw new NullPointerException();int hash = hash(key);// hash 值无符号右移 28位(初始化时获得),然后与 segmentMask=15 做与运算// 其实也就是把高4位与segmentMask(1111)做与运算int j = (hash >>> segmentShift) & segmentMask;if ((s = (Segment<K,V>)UNSAFE.getObject // nonvolatile; recheck(segments, (j << SSHIFT) + SBASE)) == null) // in ensureSegment// 如果查找到的 Segment 为空,初始化s = ensureSegment(j);return s.put(key, hash, value, false);
}/*** Returns the segment for the given index, creating it and* recording in segment table (via CAS) if not already present.** @param k the index* @return the segment*/
@SuppressWarnings("unchecked")
private Segment<K,V> ensureSegment(int k) {final Segment<K,V>[] ss = this.segments;long u = (k << SSHIFT) + SBASE; // raw offsetSegment<K,V> seg;// 判断 u 位置的 Segment 是否为nullif ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) {Segment<K,V> proto = ss[0]; // use segment 0 as prototype// 获取0号 segment 里的 HashEntry<K,V> 初始化长度int cap = proto.table.length;// 获取0号 segment 里的 hash 表里的扩容负载因子,所有的 segment 的 loadFactor 是相同的float lf = proto.loadFactor;// 计算扩容阀值int threshold = (int)(cap * lf);// 创建一个 cap 容量的 HashEntry 数组HashEntry<K,V>[] tab = (HashEntry<K,V>[])new HashEntry[cap];if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) { // recheck// 再次检查 u 位置的 Segment 是否为null,因为这时可能有其他线程进行了操作Segment<K,V> s = new Segment<K,V>(lf, threshold, tab);// 自旋检查 u 位置的 Segment 是否为nullwhile ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u))== null) {// 使用CAS 赋值,只会成功一次if (UNSAFE.compareAndSwapObject(ss, u, null, seg = s))break;}}}return seg;
}
上面的源码分析了 ConcurrentHashMap 在 put 一个数据时的处理流程,下面梳理下具体流程。
-
计算要 put 的 key 的位置,获取指定位置的
Segment。 -
如果指定位置的
Segment为空,则初始化这个Segment.初始化 Segment 流程:
- 检查计算得到的位置的
Segment是否为 null. - 为 null 继续初始化,使用
Segment[0]的容量和负载因子创建一个HashEntry数组。 - 再次检查计算得到的指定位置的
Segment是否为 null. - 使用创建的
HashEntry数组初始化这个 Segment. - 自旋判断计算得到的指定位置的
Segment是否为 null,使用 CAS 在这个位置赋值为Segment.
- 检查计算得到的位置的
-
Segment.put插入 key,value 值。
(2)put(key,value)
final V put(K key, int hash, V value, boolean onlyIfAbsent) {// 获取 ReentrantLock 独占锁,获取不到,scanAndLockForPut 获取。HashEntry<K,V> node = tryLock() ? null : scanAndLockForPut(key, hash, value);V oldValue;try {HashEntry<K,V>[] tab = table;// 计算要put的数据位置int index = (tab.length - 1) & hash;// CAS 获取 index 坐标的值,并查找该index位置的HashEntry元素HashEntry<K,V> first = entryAt(tab, index);//遍历该HashEntry元素的链表for (HashEntry<K,V> e = first;;) {if (e != null) {// 检查是否 key 已经存在,如果存在,则遍历链表寻找位置,找到后替换 valueif ((k = e.key) == key ||(e.hash == hash && key.equals(k))) {oldValue = e.value;if (!onlyIfAbsent) {e.value = value;++modCount;}break;}e = e.next;}//该位置为空else {// first 有值没说明 index 位置已经有值了,有冲突,链表头插法。// 再次判断该hashEntry位置是否为空if (node != null)//不为空//头插法node.setNext(first);else//创建新节点node = new HashEntry<K,V>(hash, key, value, first);int c = count + 1;// 容量大于扩容阀值,小于最大容量,进行扩容if (c > threshold && tab.length < MAXIMUM_CAPACITY)rehash(node);else// index 位置赋值 node,node 可能是一个元素,也可能是一个链表的表头setEntryAt(tab, index, node);++modCount;count = c;oldValue = null;break;}}} finally {unlock();}return oldValue;
}
由于 Segment 继承了 ReentrantLock,所以 Segment 内部可以很方便的获取锁,put 流程就用到了这个功能。
-
tryLock()获取锁,获取不到使用scanAndLockForPut方法继续获取。 -
计算 put 的数据要放入的 index 位置(HashEntry数组),然后获取这个位置上的
HashEntry。 -
遍历该位置的HashEntry,因为这里获取的
HashEntry可能是一个空元素数组,也可能是链表已存在,所以要区别对待。在目标槽位处,通过CAS(CompareAnd swap)操作尝试将新节点插入到链表头部
-
如果 槽位不为空,已经有节点存在,进入链表或树的插入逻辑:
-
遍历链表或树,寻找合适的位置(相同hash值和equals相等的key存在的位置)。
-
若找到已有键值对,替换原有值(根据onlylfAbsent参数决定是否替换)。
-
若未找到相同键值对,则使用CAS或synchronized添加新节点至链表
-
-
如果 槽位为空,则直接尝试CAS插入新节点。
-
在插入新元素时候(除了替换原有的元素之外)如果当前容量大于扩容阀值,小于最大容量,进行扩容,扩容后再进行插入操作
-
(3)自旋获取hash位置的HashEntry
- 不断的自旋
tryLock()获取锁。当自旋次数大于指定次数时,使用lock()阻塞获取锁。在自旋时顺表获取下 hash 位置的HashEntry。
private HashEntry<K,V> scanAndLockForPut(K key, int hash, V value) {HashEntry<K,V> first = entryForHash(this, hash);HashEntry<K,V> e = first;HashEntry<K,V> node = null;int retries = -1; // negative while locating node// 自旋获取锁while (!tryLock()) {HashEntry<K,V> f; // to recheck first belowif (retries < 0) {if (e == null) {if (node == null) // speculatively create nodenode = new HashEntry<K,V>(hash, key, value, null);retries = 0;}else if (key.equals(e.key))retries = 0;elsee = e.next;}else if (++retries > MAX_SCAN_RETRIES) {// 自旋达到指定次数后,阻塞等到只到获取到锁lock();break;}else if ((retries & 1) == 0 &&(f = entryForHash(this, hash)) != first) {e = first = f; // re-traverse if entry changedretries = -1;}}return node;
}
9.1.4 rehash扩容
ConcurrentHashMap的扩容只会扩容到原来的两倍。- 老数组里的数据移动到新的数组时,位置要么不变,要么变为
index+ oldSize - 参数里 的 node 会在扩容之后使用链表头插法 插入到指定位置。
private void rehash(HashEntry<K,V> node) {HashEntry<K,V>[] oldTable = table;// 老容量int oldCapacity = oldTable.length;// 新容量,扩大两倍int newCapacity = oldCapacity << 1;// 新的扩容阀值threshold = (int)(newCapacity * loadFactor);// 创建新的数组HashEntry<K,V>[] newTable = (HashEntry<K,V>[]) new HashEntry[newCapacity];// 新的掩码,默认2扩容后是4,-1是3,二进制就是11。int sizeMask = newCapacity - 1;for (int i = 0; i < oldCapacity ; i++) {// 遍历老数组HashEntry<K,V> e = oldTable[i];if (e != null) {HashEntry<K,V> next = e.next;// 计算新的位置,新的位置只可能是不便或者是老的位置+老的容量。int idx = e.hash & sizeMask;if (next == null) // Single node on list// 如果当前位置还不是链表,只是一个元素,直接赋值newTable[idx] = e;else { // Reuse consecutive sequence at same slot// 如果是链表了HashEntry<K,V> lastRun = e;int lastIdx = idx;// 新的位置只可能是不便或者是老的位置+老的容量。// 遍历结束后,lastRun 后面的元素位置都是相同的for (HashEntry<K,V> last = next; last != null; last = last.next) {int k = last.hash & sizeMask;if (k != lastIdx) {lastIdx = k;lastRun = last;}}// ,lastRun 后面的元素位置都是相同的,直接作为链表赋值到新位置。newTable[lastIdx] = lastRun;// Clone remaining nodesfor (HashEntry<K,V> p = e; p != lastRun; p = p.next) {// 遍历剩余元素,头插法到指定 k 位置。V v = p.value;int h = p.hash;int k = h & sizeMask;HashEntry<K,V> n = newTable[k];newTable[k] = new HashEntry<K,V>(h, p.key, v, n);}}}}// 头插法插入新的节点int nodeIndex = node.hash & sizeMask; // add the new nodenode.setNext(newTable[nodeIndex]);newTable[nodeIndex] = node;table = newTable;
}
9.2ConcurrentHashMap 1.8
9.2.1存储结构
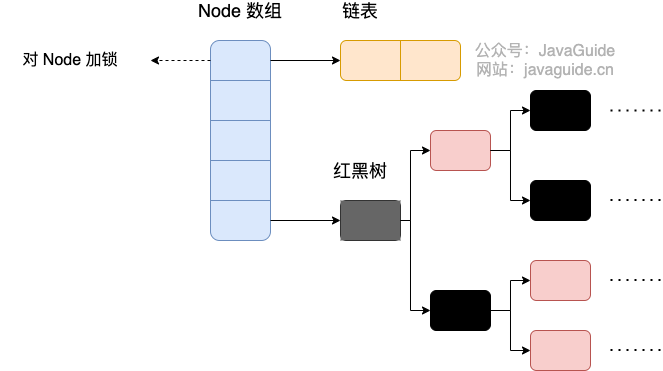
- JDK1.7版本的ConcurrentHashMap底层是 Segment 数组 + HashEntry 数组 + 链表
- JDK1.8版本的底层是 Node 数组 + 链表 / 红黑树。当冲突链表达到一定长度时,链表会转换成红黑树
- 锁粒度进一步减小,1.7是锁segment数组(里面还有HashEntry数组),1.8是锁node数组
9.2.2初始化
/*** Initializes table, using the size recorded in sizeCtl.*/
private final Node<K,V>[] initTable() {Node<K,V>[] tab; int sc;while ((tab = table) == null || tab.length == 0) {// 如果 sizeCtl < 0 ,说明另外的线程执行CAS 成功,正在进行初始化。if ((sc = sizeCtl) < 0)// 让出 CPU 使用权Thread.yield(); // lost initialization race; just spinelse if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {try {if ((tab = table) == null || tab.length == 0) {int n = (sc > 0) ? sc : DEFAULT_CAPACITY;@SuppressWarnings("unchecked")Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];table = tab = nt;sc = n - (n >>> 2);}} finally {sizeCtl = sc;}break;}}return tab;
}
从源码中可以发现 ConcurrentHashMap 的初始化是通过自旋和 CAS 操作完成的。里面需要注意的是变量 sizeCtl (sizeControl 的缩写),它的值决定着当前的初始化状态。
- -1 说明正在初始化,其他线程需要自旋等待
- -N 说明 table 正在进行扩容,高 16 位表示扩容的标识戳,低 16 位减 1 为正在进行扩容的线程数
- 0 表示 table 初始化大小,如果 table 没有初始化
- >0 表示 table 扩容的阈值,如果 table 已经初始化
9.2.3put流程
public V put(K key, V value) {return putVal(key, value, false);
}/** Implementation for put and putIfAbsent */
final V putVal(K key, V value, boolean onlyIfAbsent) {// key 和 value 不能为空if (key == null || value == null) throw new NullPointerException();int hash = spread(key.hashCode());int binCount = 0;for (Node<K,V>[] tab = table;;) {// f = 目标位置元素Node<K,V> f; int n, i, fh;// fh 后面存放目标位置的元素 hash 值if (tab == null || (n = tab.length) == 0)// 数组桶为空,初始化数组桶(自旋+CAS)tab = initTable();else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {// 桶内为空,CAS 放入,不加锁,成功了就直接 break 跳出if (casTabAt(tab, i, null,new Node<K,V>(hash, key, value, null)))break; // no lock when adding to empty bin}else if ((fh = f.hash) == MOVED)tab = helpTransfer(tab, f);else {V oldVal = null;// 使用 synchronized 加锁加入节点synchronized (f) {if (tabAt(tab, i) == f) {// 说明是链表if (fh >= 0) {binCount = 1;// 循环加入新的或者覆盖节点for (Node<K,V> e = f;; ++binCount) {K ek;if (e.hash == hash &&((ek = e.key) == key ||(ek != null && key.equals(ek)))) {oldVal = e.val;if (!onlyIfAbsent)e.val = value;break;}Node<K,V> pred = e;if ((e = e.next) == null) {pred.next = new Node<K,V>(hash, key,value, null);break;}}}else if (f instanceof TreeBin) {// 红黑树Node<K,V> p;binCount = 2;if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key,value)) != null) {oldVal = p.val;if (!onlyIfAbsent)p.val = value;}}}}if (binCount != 0) {if (binCount >= TREEIFY_THRESHOLD)treeifyBin(tab, i);if (oldVal != null)return oldVal;break;}}}addCount(1L, binCount);return null;
}
总结:
- 根据 key 计算出 hashcode ,并判断是否需要进行初始化。
- 即为当前 key 定位出的 Node,如果为空表示当前位置可以写入数据,利用 CAS 尝试写入,失败则自旋保证成功。
- 如果当前位置的
hashcode == MOVED == -1,则需要进行扩容。 - 如果都不满足,则利用 synchronized 锁写入数据。
- 如果数量大于
TREEIFY_THRESHOLD则要执行树化方法,在treeifyBin中会首先判断当前数组长度 ≥64 时才会将链表转换为红黑树
9.3总结
- JDK1.8的实现降低锁的粒度,JDK1.7版本锁的粒度是基于Segment的,包含多个HashEntry,而JDK1.8锁的粒度就是HashEntry(首节点)
- JDK1.8版本的数据结构变得更加简单,使得操作也更加清晰流畅,因为已经使用synchronized来进行同步,所以不需要分段锁的概念,也就不需要Segment这种数据结构了,由于粒度的降低,实现的复杂度也增加了
- JDK1.8使用红黑树来优化链表,基于长度很长的链表的遍历是一个很漫长的过程,而红黑树的遍历效率是很快的,代替一定阈值的链表,这样形成一个最佳拍档
- JDK1.8为什么使用内置锁synchronized来代替重入锁ReentrantLock,原因如下:
- 因为粒度降低了,在相对而言的低粒度加锁方式,synchronized并不比ReentrantLock差,在粗粒度加锁中ReentrantLock可能通过Condition来控制各个低粒度的边界,更加的灵活,而在低粒度中,Condition的优势就没有了
- JVM的开发团队从来都没有放弃synchronized,而且基于JVM的synchronized优化空间更大,使用内嵌的关键字比使用API更加自然
- 在大量的数据操作下,对于JVM的内存压力,基于API的ReentrantLock会开销更多的内存,虽然不是瓶颈,但是也是一个选择依据
ConCurrentHashMap源码分析篇主要介绍了ConCurrentHashMap在JDK1.7、1.8两个版本的底层数据机构(segement+HashEntry+链表、Node+链表+红黑树)、初始化流程、put流程、rehash流程,重点为put流程(实现线程安全的原因:在put即将插入元素的时候通过CAS操作保证线程安全)此外,JDK1.8和1.7的一个重大区别在于1.8采用Synchronized锁替换ReentranLock,优势有JVM优化空间大,锁粒度减小,内存减小

这篇关于【JAVA重要知识 | 第九篇】ConCurrentHashMap源码分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





