本文主要是介绍Halcon算子学习:create_pose,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
create_pose
创建3D位姿
( : : TransX, TransY, TransZ, RotX, RotY, RotZ, OrderOfTransform, OrderOfRotation, ViewOfTransform : Pose)
输入:
-
TransX
沿x轴平移(以[m]为单位)。
默认值:0.1
建议值:-1.0,-0.75,-0.5,-0.25,-0.2,-0.1,-0.5,-0.25,-0.125,-0.01、0.0、0.01、0.125、0.25、0.5、0.1、0.2、0.25、0.5 ,0.75、1.0 -
TransY
沿y轴平移(以[m]为单位)。
默认值:0.1
建议值:-1.0,-0.75,-0.5,-0.25,-0.2,-0.1,-0.5,-0.25,-0.125,-0.01、0.0、0.01、0.125、0.25、0.5、0.1、0.2、0.25、0.5 ,0.75、1.0 -
TransZ
沿z轴平移(以[m]为单位)。
默认值:0.1
建议值:-1.0,-0.75,-0.5,-0.25,-0.2,-0.1,-0.5,-0.25,-0.125,-0.01、0.0、0.01、0.125、0.25、0.5、0.1、0.2、0.25、0.5 ,0.75、1.0 -
RotX
绕Rodriguez向量的x轴或x分量旋转(以[°]为单位或无单位)。
默认值:90.0
建议值:0.0、90.0、180.0、270.0
典型值范围:0≤RotX≤360 -
RotY
绕Rodriguez向量的y轴或y分量旋转(以[°]为单位或无单位)。
默认值:90.0
建议值:0.0、90.0、180.0、270.0
典型值范围:0≤RotY≤360 -
RotZ
绕Rodriguez矢量的z轴或z分量旋转(以[°]或不带单位)。
默认值:90.0
建议值:0.0、90.0、180.0、270.0
典型值范围:0≤RotZ≤360 -
OrderOfTransform
旋转和平移的顺序。
默认值:“ Rp + T”
建议值:“ Rp + T”,“ R(p-T)” -
OrderOfRotation
旋转值的含义。
默认值:“ gba”
建议值:“ gba”,“ abg”,“ rodriguez” -
ViewOfTransform
变换视角。
默认值:“point”
建议值:“ point”,“ coordinate_system”
输出:
- Pose
3D姿势。
元素数:7
算子描述
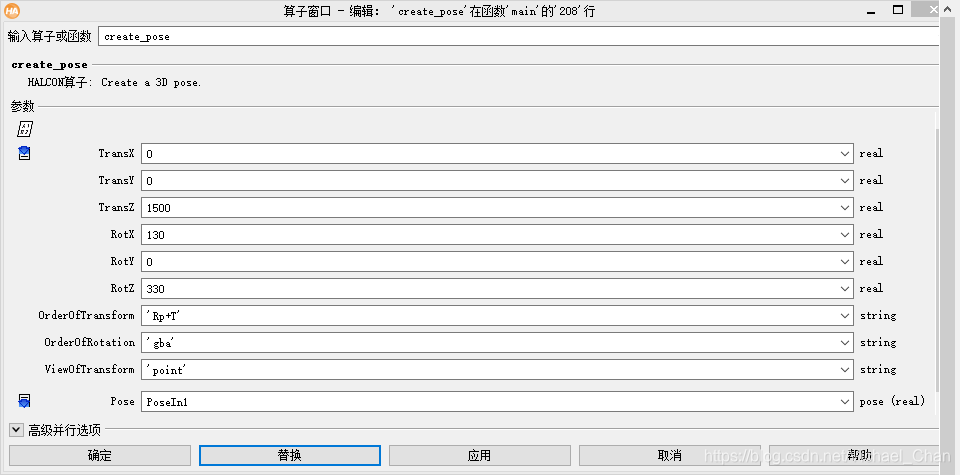
1.create_pose创建3D姿势-Pose。 姿势描述了刚性3D变换,即由任意平移和旋转组成的变换,具有6个参数:TransX,TransY和TransZ分别指定沿x,y和z轴的平移,而RotX ,RotY和RotZ描述旋转。
2.3D姿态通常以两种方式使用:首先,描述一个坐标系相对于另一坐标系的位置和方向(例如,零件坐标系相对于相机坐标系的姿态,简而言之:零件相对姿态;
其次是描述如何在两个坐标系之间转换坐标(例如,将点从零件坐标转换为摄像机坐标)。
3.方向表示(旋转)
1)围绕任意轴的3D旋转可以多种方式由3个参数表示。 HALCON允许您使用参数OrderOfRotation在其中三个中进行选择:如果传递值’gba’,则旋转将通过以下围绕三个轴的旋转链来描述(有关旋转矩阵Rx,Ry,Rz的内容,请参见hom_mat3d_rotate):

2)Rgba 在文献中表示为“ Yaw-Pitch-Roll 翻滚-偏航-仰俯”。
请注意,您可以通过两种方式“读取”该链:如果从右侧开始,则始终相对于全局(即固定或“旧”)坐标系进行旋转。 因此,可以理解为:首先绕着z轴旋转,然后绕着“旧” y轴旋转,最后绕着“旧” x轴旋转。 相反,如果您从左到右阅读,则相对于局部(即“新”)坐标系进行旋转。 然后,对应于以下内容:首先绕x轴旋转,绕“新” y轴旋转,最后绕“新(等)” z轴旋转。
从右到左读取对应于以下算子调用顺序:
hom_mat3d_identity (HomMat3DIdent)hom_mat3d_rotate (HomMat3DIdent, RotZ, 'z', 0, 0, 0, HomMat3DRotZ)hom_mat3d_rotate (HomMat3DRotZ, RotY, 'y', 0, 0, 0, HomMat3DRotYZ)hom_mat3d_rotate (HomMat3DRotYZ, RotX, 'x', 0, 0, 0, HomMat3DXYZ)
相反,从左向右读取对应于以下算子调用顺序:
hom_mat3d_identity (HomMat3DIdent)hom_mat3d_rotate_local (HomMat3DIdent, RotX, 'x', HomMat3DRotX)hom_mat3d_rotate_local (HomMat3DRotX, RotY, 'y', HomMat3DRotXY)hom_mat3d_rotate_local (HomMat3DRotXY, RotZ, 'z', HomMat3DXYZ)
3)在OrderOfRotation中传递“ abg”时,旋转对应于以下链:

Rabg在文献中表示为“ Roll-Pitch-Yaw 翻滚-偏航-仰俯”。
4)如果在OrderOfRotation中传递“rodriguez”,则旋转参数RotX,RotY和RotZ将被解释为所谓的Rodriguez旋转向量的x,y和z分量。 向量的方向定义为(任意)旋转轴。 向量的长度通常定义为正方向的旋转角度。 此处,使用Rodriguez向量的变体,其中向量的长度定义为旋转角一半的正切值:

请注意,这些3D位姿可能是模棱两可的,这意味着齐次变换矩阵可以具有多个位姿表示形式。 例如,对于Rgba (b=±90)以下位姿对应于相同的齐次变换矩阵:
// 两种变换形式下,最终变换后的坐标位姿一样的create_pose(0, 0, 0, 30 , 90, 54, 'Rp+T', 'gba', 'point', Pose1)create_pose(0, 0, 0, 17, 90, 67, 'Rp+T', 'gba', 'point', Pose2)
如果这会导致问题,则可以改用齐次变换矩阵或四元数(axis_angle_to_quat)表示旋转。
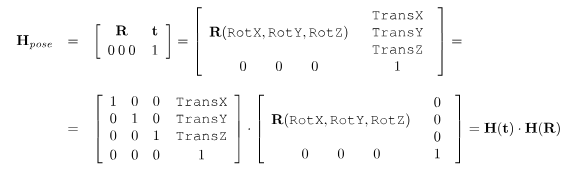
4.对应的齐次变换矩阵
1)您可以使用运算符 pose_to_hom_mat3d 获得与姿势相对应的齐次变换矩阵。 在标准定义中,这是以下齐次变换矩阵,可以将其分解为两个单独的矩阵,一个用于平移(H(t)),一个用于旋转(H(R)):
2)坐标转换
下面的等式描述了如何使用位姿(Pose)或更确切地说,即其相应的齐次变换矩阵2H1 (输入和输出点作为齐次矢量,另请参见affine_trans_point_3d)将一个点的从坐标系1转换为坐标系2。 请注意,要将点从坐标系1转换为坐标系2,请使用描述坐标系1相对于坐标系2的姿态的转换矩阵(HomMat3DFrom1In2)。

这对应于以下算子调用:
pose_to_hom_mat3d(PoseOf1In2, HomMat3DFrom1In2)affine_trans_point_3d(HomMat3DFrom1In2, P1X, P1Y, P1Z, P2X, P2Y, P2Z)
3)非标准位姿定义
到目前为止,我们已经描述了标准姿势定义。 要创建此类姿势,请为参数OrderOfTransform选择(默认)值“ Rp + T”,为ViewOfTransform选择“ point”。 通过为这些参数指定其他值,您可以创建非标准位姿类型,我们将在下面简要描述。 请注意,仅为了向后兼容才支持这些表示类型。 我们强烈建议使用标准类型。
如果为OrderOfTransform选择’R(p-T)’,则创建的位姿对应于以下变换链,即旋转和平移的顺序相反,并且平移取反:

如果为ViewOfTransform选择’coordinate_system’,则转换顺序保持不变,但旋转角度将被取反。 请注意,与其名称相反,这并不等同于变换坐标系

4)返回的数据结构
创建的3D姿势以Pose返回,该姿势是长度为7的元组。 前三个元素包含平移参数TransX,TransY和TransZ,然后是旋转参数RotX,RotY和RotZ。 最后一个元素对使用参数OrderOfTransform,OrderOfRotation和ViewOfTransform选择的姿势的表示类型进行编码。 下表列出了可能的组合。 如前所述,我们建议仅使用OrderOfTransform ='Rp + T’和ViewOfTransform ='point’的表示类型(代码0、2和4)。
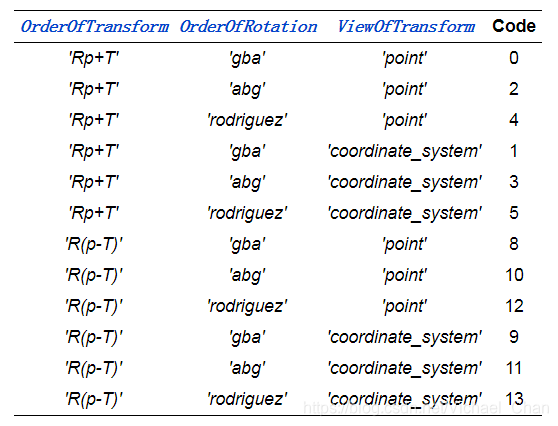
您可以使用convert_pose_type将姿势转换为其他表示类型,并使用get_pose_type查询类型。
这篇关于Halcon算子学习:create_pose的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








