本文主要是介绍linux -- I2C从机驱动 -- MS32006(低压5V多通道电机驱动器),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
产品简述
MS32006 是一款多通道电机驱动芯片, 其中包含两路步进电机驱动, 一路直流电机驱动; 每个通道的电流最高电流1.0A; 支持两相四线与四相五线步进电机。芯片采用 I2C 的通信接口控制模式, 兼容 3.3V/5V 的标准工业接口。
MS32006 总共集成了两路步进电机驱动器与一路直流电机驱动器, 通过 I2C 总线去控制电机的转动。 步进电机控制器可以选择全步进或者 1/2 的步进模式, 系统上一般用来做为小云台 X,Y 轴的运动控制。 直流电机也是通过 I2C 设置内部的寄存器, 来控制电机的正转, 反转, 刹车, 自由旋转这四个状态, 系统上可以用来做 IR-cut 的控制。
常用两相步进电机都是1.8°的步进角200个脉冲转一圈
如果给驱动器200个脉冲,电机转一圈,就叫整步
如果给400个脉冲,转一圈,叫半步。
800,1600,3200等脉冲转一圈,就叫细分步
主要特点
- 双路步进电机驱动,整步进或1/2步进,最大工作电流1A
- I2C串行总线通信控制电机
- 指令缓存功能,电机按照当前指令转动时预存下一条指令
- 集成一个直流电机驱动, 最大驱动电流±1.1A
- QFN24 封装(背部散热片)
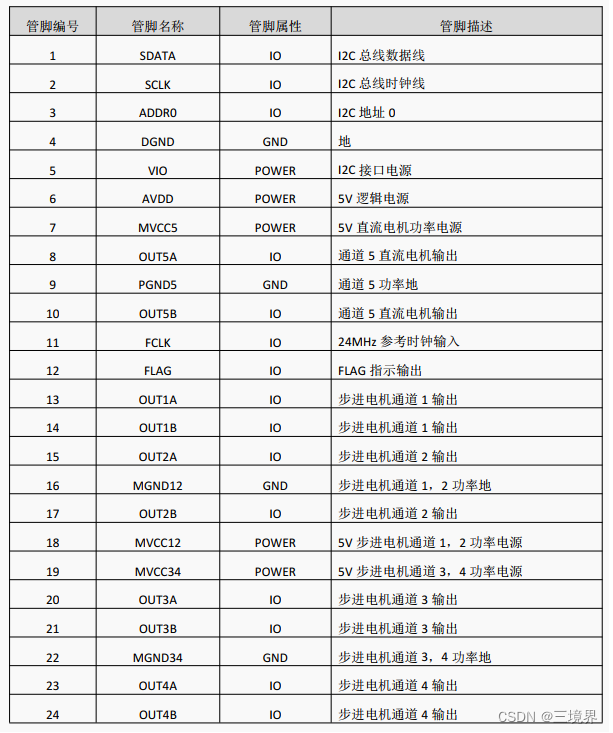
管脚图以及管脚说明
管脚图
主控侧主要关注SDATA,SCLK。分别为I2C总线的数据线和时钟线。

管脚说明
两路步进电机:OUT1A,OUT1B / OUT2A,OUT2B / OUT3A,OUT3B / OUT4A,OUT4B
一路直流电机:OUT5A,OUT5B
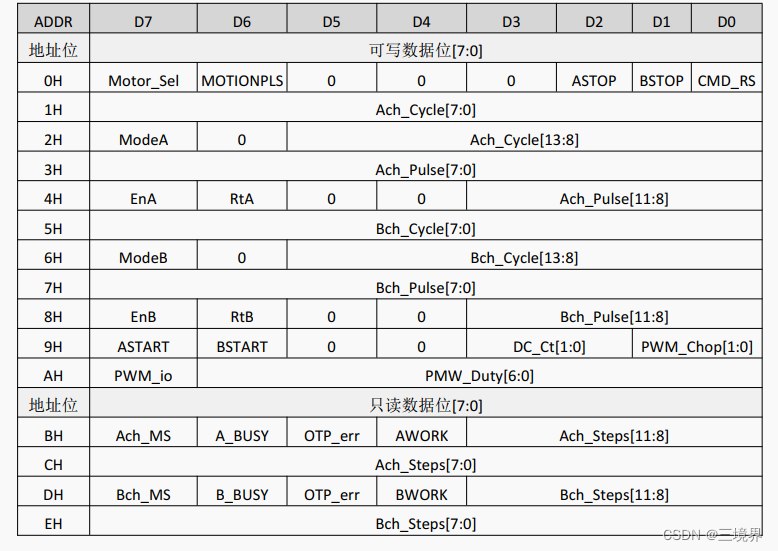
寄存器表
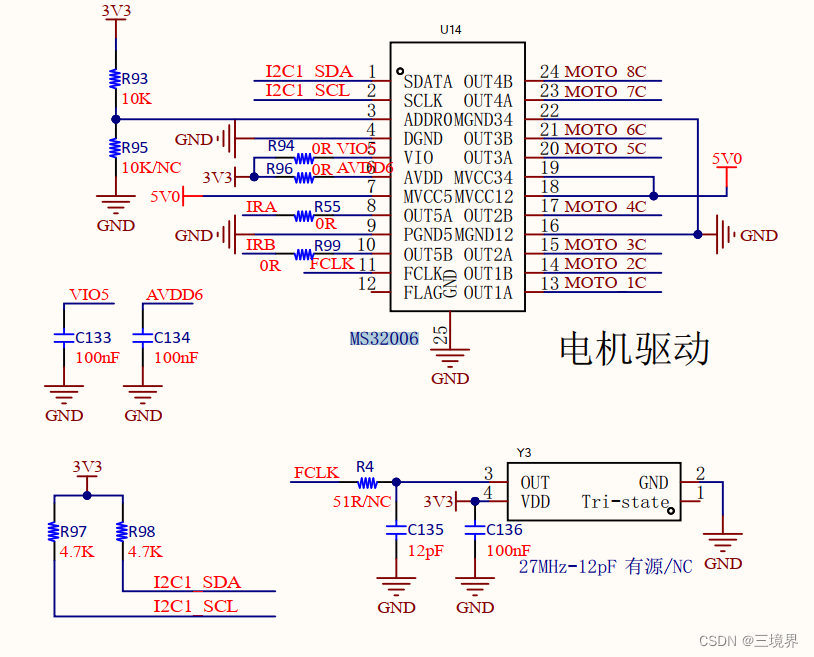
原理图分析
- 使用SoC上的I2C1,需配置I2C1引脚的复用,硬件上已经做了上拉
- 需要SoC提供FCLK,需配置时钟输出引脚的复用
- FLAG脚没有接
驱动开发
1. 框架搭建
使用字符设备驱动,将i2c_driver注册到内核中
static int __init ms32006_init(void)
{pr_debug("[%s]: %d---enter!\n", __func__, __LINE__);return i2c_add_driver(&ms32006_driver);
}
module_init(ms32006_init);static void __exit ms32006_exit(void)
{pr_debug("[%s]: %d---exit!\n", __func__, __LINE__);i2c_del_driver(&ms32006_driver);cdev_del(&ms32006cdev.cdev);unregister_chrdev_region(ms32006cdev.devid, MS32006_CNT);device_destroy(ms32006cdev.class, ms32006cdev.devid);class_destroy(ms32006cdev.class);pr_err(PREFIX "exit done!\n");
}
module_exit(ms32006_exit);2. 在I2C设备和驱动匹配成功后的probe函数中,注册字符设备驱动
I2C 设备和驱动的匹配过程是由 I2C 核心来完成的, drivers/i2c/i2c-core.c 就是 I2C 的核心
部分, I2C 核心提供了一些与具体硬件无关的 API 函数
1、 i2c_adapter 注册/注销函数
int i2c_add_adapter(struct i2c_adapter *adapter)
int i2c_add_numbered_adapter(struct i2c_adapter *adap)
void i2c_del_adapter(struct i2c_adapter * adap)
2、 i2c_driver 注册/注销函数
int i2c_register_driver(struct module *owner, struct i2c_driver *driver)
int i2c_add_driver (struct i2c_driver *driver)
void i2c_del_driver(struct i2c_driver *driver)
设备和驱动的匹配过程也是由 I2C 总线完成的, I2C 总线的数据结构为 i2c_bus_type,定义
在 drivers/i2c/i2c-core.c 文件
736 struct bus_type i2c_bus_type = {
737 .name = "i2c",
738 .match = i2c_device_match,
739 .probe = i2c_device_probe,
740 .remove = i2c_device_remove,
741 .shutdown = i2c_device_shutdown,
742 };
match 就是 I2C 总线的设备和驱动匹配函数,在这里就是 i2c_device_match 这个函数,此
函数内容如下:
457 static int i2c_device_match(struct device *dev, struct
device_driver *drv)
458 {
459 struct i2c_client *client = i2c_verify_client(dev);
460 struct i2c_driver *driver;
461
462 if (!client)
463 return 0;
464
465 /* Attempt an OF style match */
466 if (of_driver_match_device(dev, drv))
467 return 1;
468
469 /* Then ACPI style match */
470 if (acpi_driver_match_device(dev, drv))
471 return 1;
472
473 driver = to_i2c_driver(drv);
474 /* match on an id table if there is one */
475 if (driver->id_table)
476 return i2c_match_id(driver->id_table, client) != NULL;
477
478 return 0;
479 }
第 466 行, of_driver_match_device 函数用于完成设备树设备和驱动匹配。比较 I2C 设备节
点的 compatible 属性和 of_device_id 中的 compatible 属性是否相等,如果相当的话就表示 I2C
设备和驱动匹配。
第 470 行, acpi_driver_match_device 函数用于 ACPI 形式的匹配。
第 476 行, i2c_match_id 函数用于传统的、无设备树的 I2C 设备和驱动匹配过程。比较 I2C
设备名字和 i2c_device_id 的 name 字段是否相等,相等的话就说明 I2C 设备和驱动匹配。
匹配成功后,执行probe,我们在probe中,注册字符设备驱动。
static const struct file_operations ms32006_ops = {.owner = THIS_MODULE,.open = ms32006_open,.read = ms32006_read,.release = ms32006_release,.unlocked_ioctl = ms32006_ioctl,
};static int ms32006_probe(struct i2c_client *client, const struct i2c_device_id *id)
{uint32_t timer_idx;uint32_t irq,reg_addr;pr_debug("__func__:%s __line:%d \n", __func__, __LINE__);pr_err("__func__:%s __line:%d \n", __func__, __LINE__);if(ms32006cdev.major) {ms32006cdev.devid = MKDEV(ms32006cdev.major, 0);register_chrdev_region(ms32006cdev.devid, MS32006_CNT, MS32006_NAME);} else {alloc_chrdev_region(&ms32006cdev.devid, 0, MS32006_CNT, MS32006_NAME);ms32006cdev.major = MAJOR(ms32006cdev.devid);}cdev_init(&ms32006cdev.cdev, &ms32006_ops);cdev_add(&ms32006cdev.cdev, ms32006cdev.devid, MS32006_CNT);ms32006cdev.class = class_create(THIS_MODULE, MS32006_NAME);if (IS_ERR(ms32006cdev.class)) {return PTR_ERR(ms32006cdev.class);}ms32006cdev.device = device_create(ms32006cdev.class, NULL, ms32006cdev.devid, NULL, MS32006_NAME);if (IS_ERR(ms32006cdev.device)) {return PTR_ERR(ms32006cdev.device);}//ms32006cdev.nd = of_find_node_by_name(NULL, "motor_ms32006");ms32006cdev.nd = client->dev.of_node;if(ms32006cdev.nd == NULL){pr_debug("ms32006 node can not found!\n");return -EINVAL;}pr_debug("ms32006 name:%s full name:%s\n",ms32006cdev.nd->name, ms32006cdev.nd->full_name);if(of_property_read_u32(ms32006cdev.nd, "timer_idx", &timer_idx)){pr_debug("property <timer_idx> not found\n");return -EINVAL;}pr_debug("ms32006 timer_idx:%u\n", timer_idx);pr_debug("i2c client irq:%d of_irq_get:%d\n",client->irq, of_irq_get(ms32006cdev.nd, 0));irq = client->irq;if(of_property_read_u32(ms32006cdev.nd, "reg", ®_addr)){pr_debug("property <reg> not found\n");return -EINVAL;}pr_debug("ms32006 slave device address:%u\n", reg_addr);client->addr = reg_addr;ms32006cdev.private_data = client;ms32006cdev.is_initing = false;pr_debug("__func__:%s __line:%d \n", __func__, __LINE__);ms32006cdev.fclk = of_clk_get(ms32006cdev.nd, 0);if (IS_ERR(ms32006cdev.fclk)) {pr_debug("ms32006 dts fclk clock not found.\n");return PTR_ERR(ms32006cdev.fclk);}clk_prepare_enable(ms32006cdev.fclk);ms32006cdev.fclk_rate = clk_get_rate(ms32006cdev.fclk);pr_debug("ms32006 output fclk rate %u\n", ms32006cdev.fclk_rate);pr_notice(PREFIX "probe init done\n");spin_lock_init(&ms32006cdev.chip_lock);return 0;
}
3. 设备树中在I2C设备节点下,添加motor节点:
- pinctrl,在父节点i2c中已经配置了SCL和SDA两个pin的复用,这里需要复用FCLK参考时钟pin的复用
- 设置参考时钟的频率为24M
- 中断号的描述,其实没有用到,后期可能要使用中断。原理图中没有将flag脚接到SoC,无法通过中断提醒SoC
motor0: motor0@30{compatible = "relmon,ms32006";reg = <0x18>;timer_idx = <3>;pinctrl-names = "default";/*pinctrl-0 = <&gpioa15_pinctrl>;*/pinctrl-0 = <&chip_out1_pinctrl>;clocks = <&ts_clk TS_CLK_TX5112_CHIP_OCLK_I2>;clock-names = "fclk";assigned-clocks = <&ts_clk TS_CLK_TX5112_CHIP_OCLK_I2>;assigned-clock-rates = <24000000>; interrupt-parent = <&gic>;interrupts = <GIC_SPI 21 IRQ_TYPE_LEVEL_HIGH>; };
4. 实现file_operations中的接口
4.1 open,read以及release
open接口中主要做初始化:将ms32006重置后,设置一些初始的设置,并初始化runtime结构。
read接口提供了读取ms32006所有寄存器的功能
release用于释放资源
static int ms32006_open(struct inode *inode, struct file *filp)
{ms32006_op_stat_e op_stat;filp->private_data = &ms32006cdev;/* reset motor driver chip: will clear a part of register value */op_stat = ms32006_reset(&ms32006cdev);if(op_stat != SUCCESS) {return -EIO;}/* clear all register value */op_stat = __ms32006_init(&ms32006cdev);if(op_stat != SUCCESS) {return -EIO;}/* clear thread runtime information */op_stat = ms32006_thread_info_init(&ms32006cdev);if(op_stat != SUCCESS) {return -EIO;}return 0;
}static int ms32006_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{struct ms32006_dev* dev = filp->private_data;u8 reg_val[MS32006_REG_MAX_SZ];long err = 0;if(cnt < 0 || cnt > MS32006_REG_MAX_SZ){return -EIO;}ms32006_readdata(dev, reg_val);err = copy_to_user(buf, reg_val, MS32006_REG_MAX_SZ);return 0;
}static int ms32006_release(struct inode *node, struct file *filp)
{struct ms32006_dev* dev = filp->private_data;if(!IS_ERR(dev->threads_handler->thread_a->motor_thread_p))kthread_stop(dev->threads_handler->thread_a->motor_thread_p);elsepr_err(PREFIX "func:%s line:%d\n", __func__, __LINE__这篇关于linux -- I2C从机驱动 -- MS32006(低压5V多通道电机驱动器)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









