本文主要是介绍RS232/RS485信号转模拟信号隔离D/A转换器0-10V电磁阀或照明电源控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
特点:
● 低成本、小体积模块化设计
● RS-485/232接口,隔离转换成标准模拟信号输出
● 模拟信号输出精度优于 0.2%
● 可以程控校准模块输出精度
● 信号输出 / 通讯接口之间隔离耐压3000VDC
● 宽电源供电范围:8 ~ 32VDC
● 可靠性高,编程方便,易于安装和布线
● 用户可编程设置模块地址、波特率等
● 可设置成主机来读取YL31产品数据实现远程采集
● 支持Modbus RTU 通讯协议,自动识别协议
典型应用:
● 0-10V电磁阀或照明电源控制
● 智能楼宇控制、安防工程等应用系统
● RS-232/485总线工业自动化控制系统
● 工业现场控制信号隔离及长线传输
● 设备运行调试与控制
● 传感器信号的远程传输及信号还原
● 工业现场执行器数据给定
● 医疗、工控产品开发
● 4-20mA信号输出
概述:
YL31系列产品实现主机RS-485/232接口信号隔离转换成标准模拟信号,用以控制远程设备。YL31系列产品可应用在 RS-232/RS-485总线工业自动化控制系统,4-20mA,0-5V,0-10V等标准信号输出,用来控制工业现场的执行设备,控制设备以及显示仪表等等。
产品包括电源隔离,信号隔离、线性化,D/A转换和RS-485串行通信。每个串口最多可接256只 YL31系列模块,通讯方式采用ASCII码通讯协议或MODBUS RTU通讯协议,波特率可由代码设置,能与其他厂家的控制模块挂在同一RS-485总线上,便于计算机编程。
YL31系列产品是基于单片机的智能监测和控制系统,所有的用户设定的校准值,地址,波特率,数据格式,校验和状态等配置信息都储存在非易失性存储器EEPROM里。
YL31系列产品按工业标准设计、制造,信号输出 / 通讯接口之间隔离,可承受3000VDC隔离电压,抗干扰能力强,可靠性高。工作温度范围- 45℃~+80℃。
YL31功能简介:
YL31 信号隔离D/A转换模块,可以用来输出一路电压或电流信号,也可以用来输出两路可以共地的电流或电压信号。
- 模拟信号输出
12位输出精度,产品出厂前所有信号输出范围已全部校准。在使用时,用户也可以很方便的自行编程校准。
具体电流或电压输出量程请看产品选型,输出两路信号时两路输出选型必须相同。
- 通讯协议
通讯接口: 1路标准的RS-485通讯接口或1路标准的RS-232通讯接口,订货选型时注明。
通讯协议:支持两种协议,命令集定义的字符协议和MODBUS RTU通讯协议。模块自动识别通讯协议,能实现与多种品牌的PLC、RTU或计算机监控系统进行网络通讯。
数据格式:10位。1位起始位,8位数据位,1位停止位。
通讯地址(0~255)和波特率(2400、4800、9600、19200、38400、57600 、115200bps)均可设定;通讯网络最长距离可达1200米,通过双绞屏蔽电缆连接。
通讯接口高抗干扰设计,±15KV ESD保护,通信响应时间小于100mS。
- 抗干扰
可根据需要设置校验和。模块内部有瞬态抑制二极管,可以有效抑制各种浪涌脉冲,保护模块,内部的数字滤波,也可以很好的抑制来自电网的工频干扰。
选型:
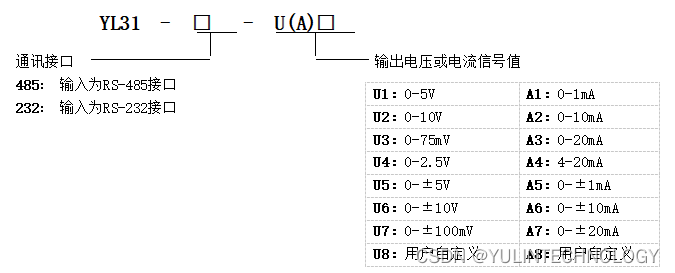
选型举例1: 型号:YL31-485-A4 表示RS-485接口,4-20mA信号输出
选型举例2: 型号:YL31-232-U1 表示RS-232接口,0-5V信号输出
YL31通用参数:
(typical @ +25℃,Vs为24VDC)
输出类型: 电流输出 / 电压输出
精 度: 0.2%
输出失调: 电流输出 ±0.5 uA/℃ ,电压输出 ±0.1 mV/℃
温度漂移: ±20 ppm/℃ (±30 ppm/℃, 最大)
输出带载能力:电流输出 350Ω (4-20mA/0-20mA/0-±20mA电流输出)
电压输出 10mA(0-5V/0-10V/0-±5V电压输出)
通 讯: 协议 RS-485 或 RS-232 标准字符协议 和 MODBUS RTU通讯协议
波特率(2400、4800、9600、19200、38400、57600 、115200bps)可软件选择
地址(0~255)可软件选择
通讯响应时间:100 ms 最大
工作电源: +8 ~ 32VDC宽供电范围,内部有防反接和过压保护电路
功率消耗: 小于1.5W
工作温度: - 45 ~ +80℃
工作湿度: 10 ~ 90% (无凝露)
存储温度: - 45 ~ +80℃
存储湿度: 10 ~ 95% (无凝露)
隔离耐压: 通讯接口 / 输出 之间: 3KVDC,1分钟,漏电流 1mA
其中通讯接口和电源共地。
耐冲击电压: 3KVAC, 1.2/50us(峰值)
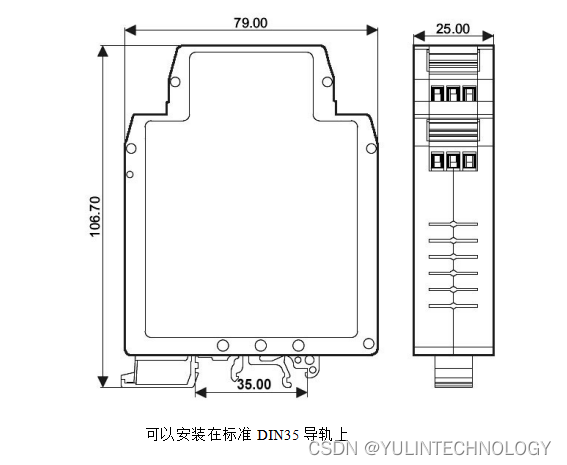
外形尺寸: 106.7 mm x 79 mm x 25mm
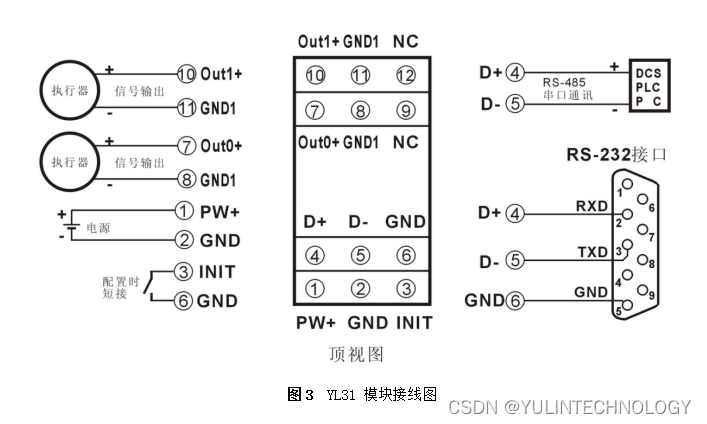
引脚定义:

*****************************************************************
详细操作文档获取请点击
RS232/RS485信号转12路模拟信号4-20mA/0-10V 隔离D/A转换器 YL34![]() https://item.taobao.com/item.htm?ft=t&id=675758531236&spm=a21dvs.23580594.0.0.1d293d0d7rqoeM
https://item.taobao.com/item.htm?ft=t&id=675758531236&spm=a21dvs.23580594.0.0.1d293d0d7rqoeM
*****************************************************************
外形尺寸:(单位:mm)
保修:
本产品自售出之日起两年内,凡用户遵守贮存、运输及使用要求,而产品质量低于技术指标的,可以返厂免费维修。因违反操作规定和要求而造成损坏的,需交纳器件费用和维修费。
版权:
版权 © 2011-2018深圳市俞霖科技开发有限公司。
如未经许可,不得复制、分发、翻译或传输本说明书的任何部分。本说明书如有修改和更新,恕不另行通知。
商标:
本说明书提及的其他商标和版权归各自的所有人所有。
版本号:V1.2
日期:2018年11月
这篇关于RS232/RS485信号转模拟信号隔离D/A转换器0-10V电磁阀或照明电源控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





