本文主要是介绍使用PWM实现呼吸灯功能,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

CC表示的意思位捕获比较,CCR表示的是捕获比较寄存器

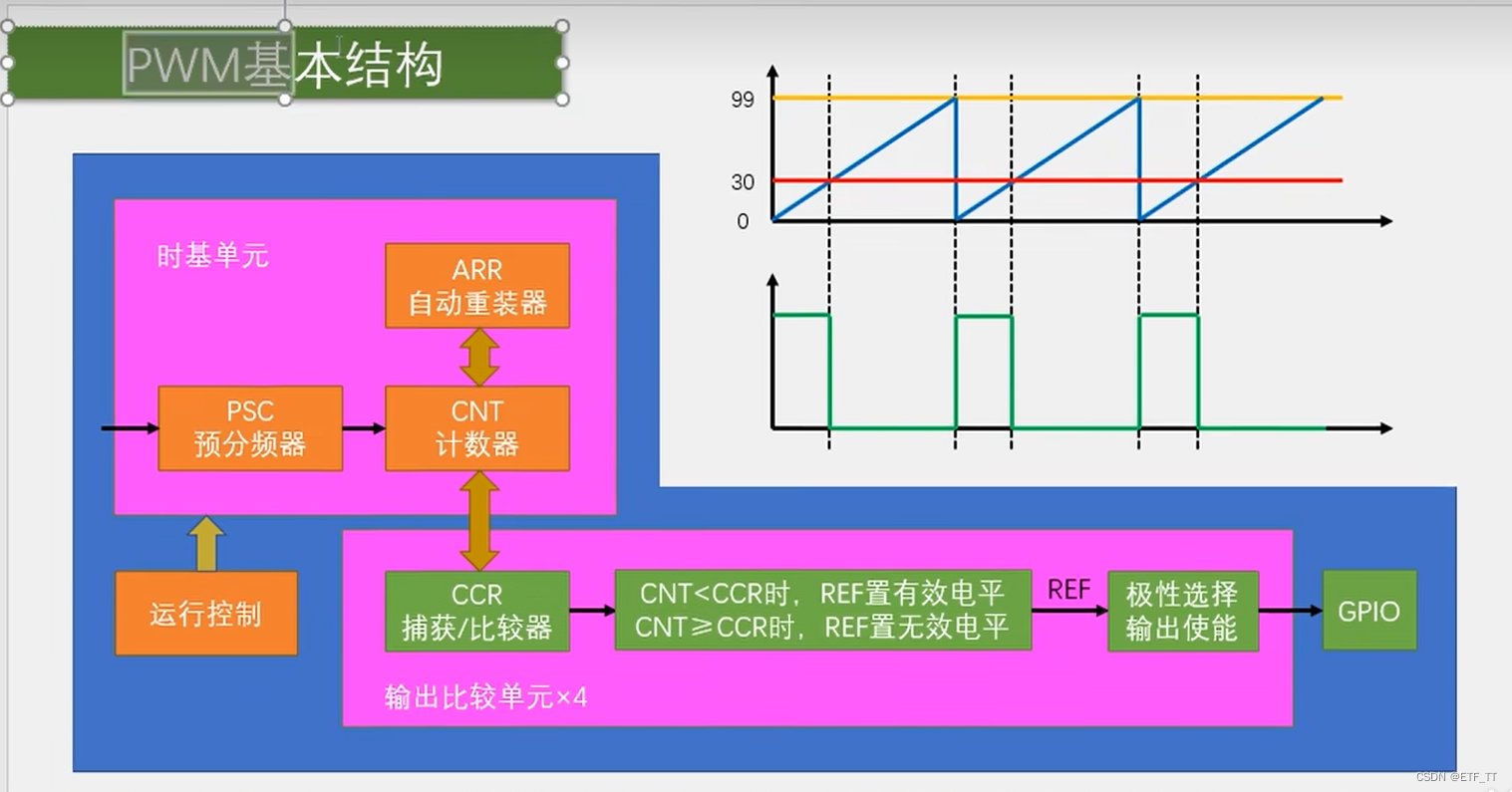
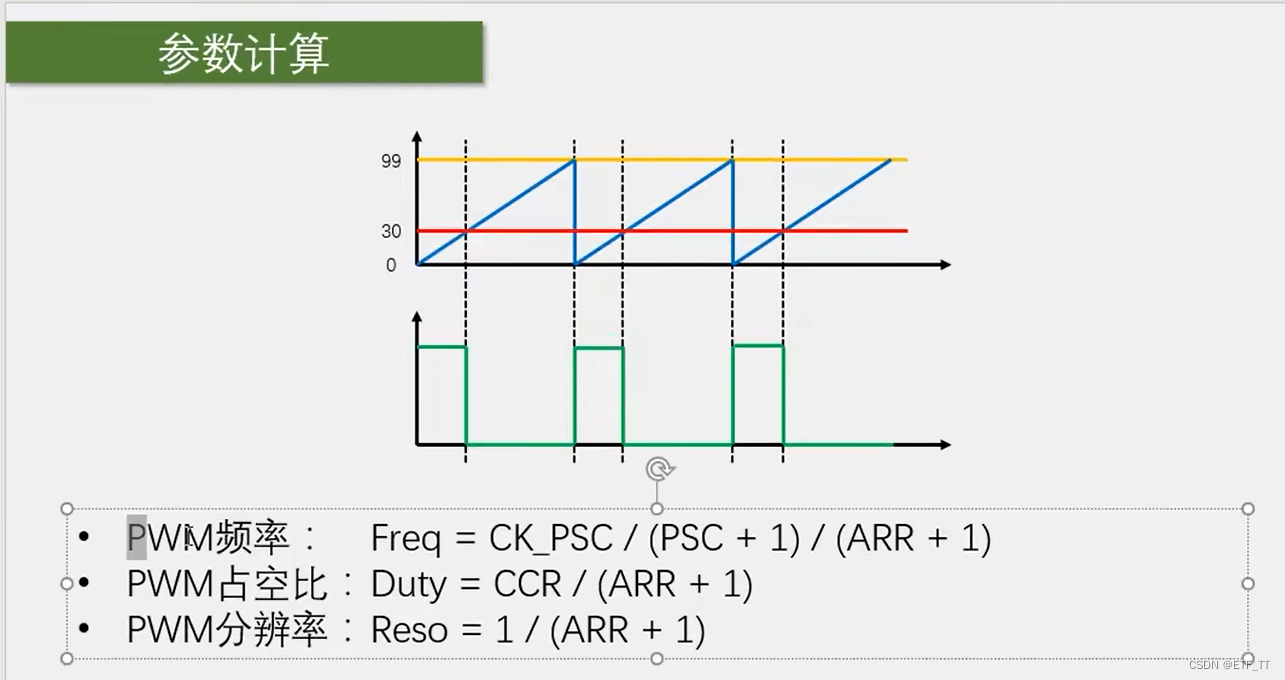
占空比等效于PWM模拟出来的电压的多少,占空比越大等效出的模拟电压越趋近于高电平,占空比越小等效出来的模拟电压越趋近于低电平,分辨率表示的是占空比变化的精细程度,按照实际项目的需求使用PWM波形可以在数字系统等效输出模拟量,可以实现LED控制亮度和控制电机的速度等操作

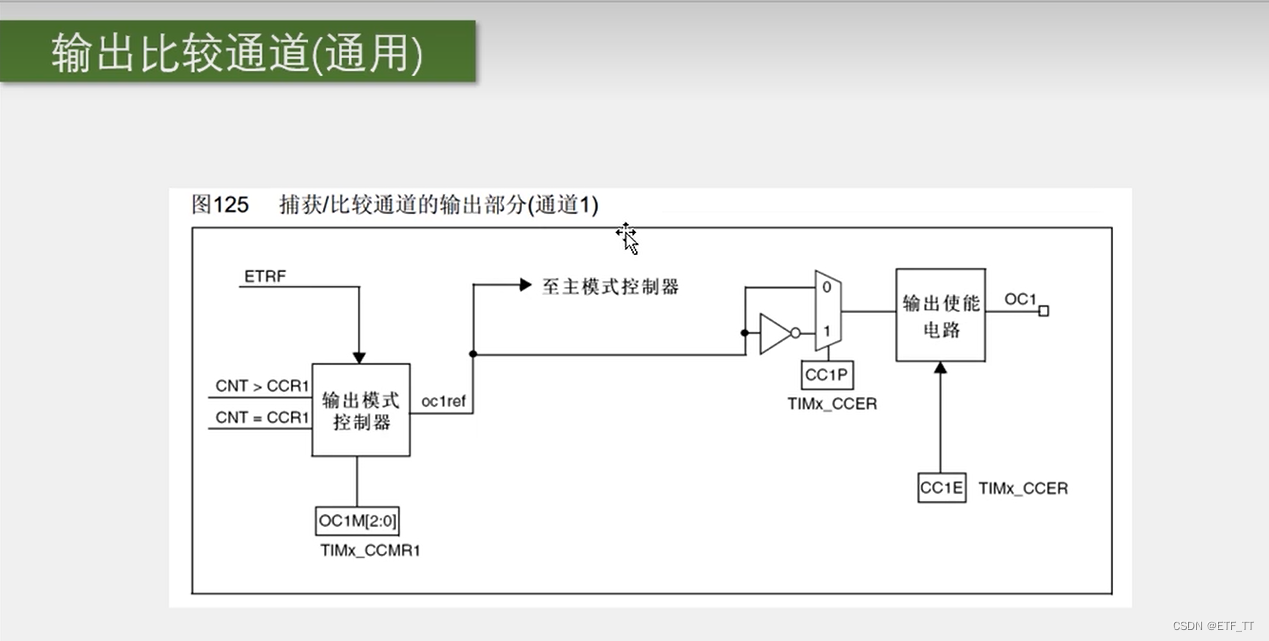
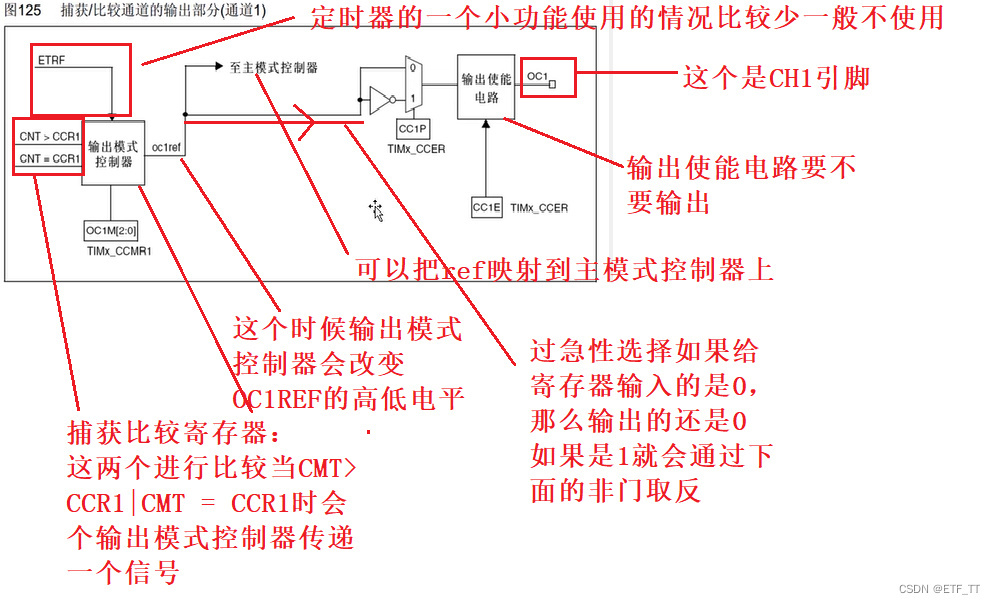
输出模式控制器是如何工作的
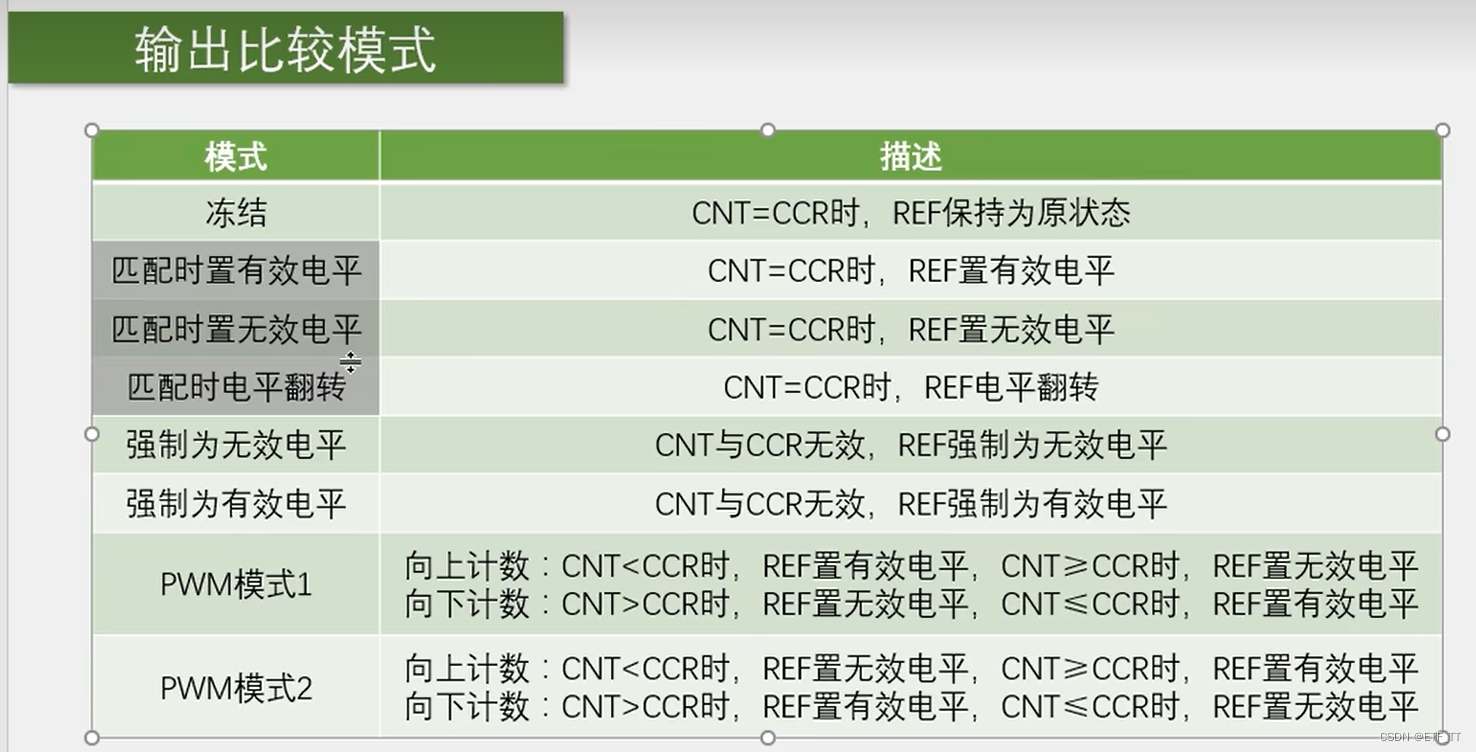
可以理解为:配置有效的电平就是设置高电平,配置无效的电平就是设置的低电平
舵机简介



电机驱动模块的硬件电路

接线图:PWM驱动呼吸灯

// 配置输出比较模块
//第一个参数的意思是选择定时器,第二个参数的意思是配置结构体
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);void TIM_OCStructInit(TIM_OCInitTypeDef* TIM_OCInitStruct); // 给输出比较结构体赋值一个默认值
// 配置强制输出模式
void TIM_ForcedOC1Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC2Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC3Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC4Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);//配置CCR寄存器的预装功能
void TIM_CCPreloadControl(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC3PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC4PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);// 配置快速使能
void TIM_OC1FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC2FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC3FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC4FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);这个不是重点内容
void TIM_OC1FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC2FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC3FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC4FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);// 单独设置输出比较的极性
void TIM_OC1PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC1NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC2PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC2NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC3PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC3NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC4PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);// 单独修改使能输出参数
void TIM_CCxCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCx);
void TIM_CCxNCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCxN);// 选择输出比较模式
void TIM_SelectOCxM(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_OCMode);
**// 单独更改CCR寄存器值的函数,比较重要**
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3);
void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);
PWM的C语言文件

使用PWM实现呼吸灯的效果
#include "stm32f10x.h" // Device headervoid PWM_Init(void){// 开启时钟,这里TIM2是通用寄存器RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);// GPIO初始化代码/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟// GPIO引脚重映射,表示重映射和引脚之间的关系RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE);GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;// 使用复用开漏推挽输出模式GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA1和PA2引脚初始化为推挽输出// 选择时基单元的时钟,选择内部时钟的模式,定时器默认使用的是内部单元的时钟TIM_InternalClockConfig(TIM2);// 配置时基单元,初始化结构体TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;// 将结构体成员都引用出来放置在这个位置TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 配置参数是否分屏TIM_TimeBaseInitStructure.TIM_CounterMode =TIM_CounterMode_Up; // 选择计数的模式选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 100 -1; // 表示ARR自动重装器的值,这两个参数的取值都要在0-65535之间TIM_TimeBaseInitStructure.TIM_Prescaler = 720-1; // PSC预分频器的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; // 重复计数器的值// 初始化结构体并将结构体的地址放置在init函数中TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);// 初始化输出比较单元TIM_OCInitTypeDef TIM_OCInitStructure;// 给结构体赋初始值TIM_OCStructInit(&TIM_OCInitStructure);// 设置输出比较的模式TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;// 设置输出比较的极性,选择高极性TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;// 设置输出使能,输出状态TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable ;//设置CCR,设置ccr寄存器的值TIM_OCInitStructure.TIM_Pulse = 0; // CCRTIM_OC1Init(TIM2, &TIM_OCInitStructure);// 启动定时器TIM_Cmd(TIM2, ENABLE);
}
void PWM_SetCompare1(uint16_t Compare){TIM_SetCompare1(TIM2,Compare);
}PWM头文件

#ifndef __PWM_H_
#define __PWM_H_
void PWM_Init(void);
void PWM_SetCompare1(uint16_t Compare);
#endifmain主函数文件
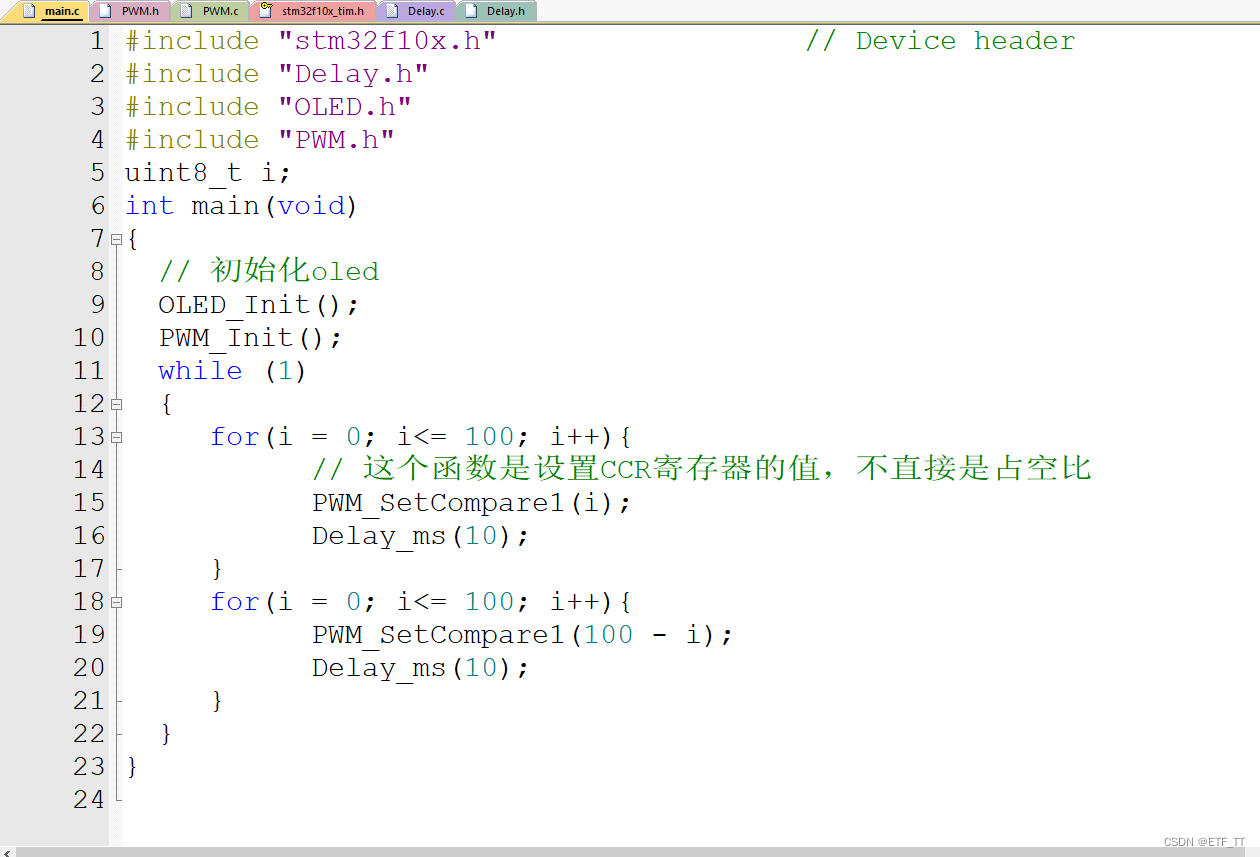
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"
uint8_t i;
int main(void)
{// 初始化oledOLED_Init();PWM_Init();while (1){for(i = 0; i<= 100; i++){// 这个函数是设置CCR寄存器的值,不直接是占空比PWM_SetCompare1(i);Delay_ms(10);}for(i = 0; i<= 100; i++){PWM_SetCompare1(100 - i);Delay_ms(10);}}
}
PWM驱动舵机旋转
PWM驱动直流电机旋转
这篇关于使用PWM实现呼吸灯功能的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




