本文主要是介绍论如何自研电动车控制器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
三步走:
第一步:学习硬件知识:模拟电路,数字电路,画板,PCB Layout
第二步:学习软件知识: C语言,STM32, FOC算法
第三步:结合以上两点,参考市面上电动车控制器,模仿着做一个
博主我,经过5年的摸爬滚打,终于可以独立开发啦!博主毕业后也从事相关工作,故可以独立开发,建议新手还是好好学习,踏踏实实打好基础一步一步来!
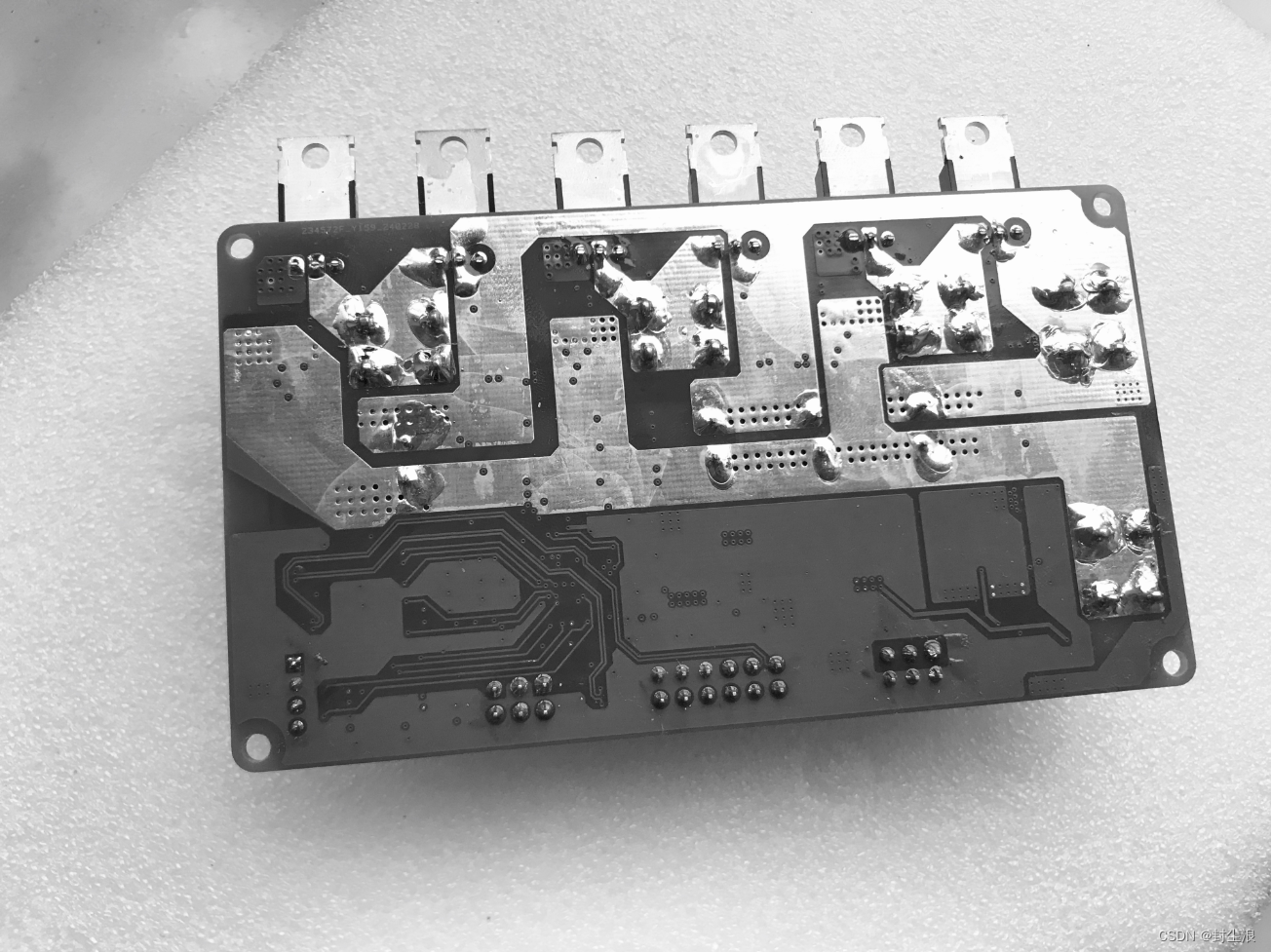
下面是我做的电动车控制器,其实不止适用于电动车,滑板车,卡丁车,老年代步车也能用!
概述
1.适用于 三相无刷且位置传感器为三霍尔(相位120度)的电机。
2.内置速度闭环,支持正反转,可精确控制电机转速。
3.控制接口同时支持ADC/485/CAN,其中485和CAN, 用户只需按照通信协议发送控制指令,即可控制电机启动 停止,正转反转,速度高低。
参数
1. 电压:DC15~72V
2. 电流:0~40A
3. 控制接口:ADC/485/CAN
4.工作温度:-20~+60℃
5.产品尺寸:长*宽*高(130mm*84mm*22mm)

控制接口特地加入:ADC 和DIR, ADC接口可适配市面上常见的油门转把,DIR可通过高低电平选择电机顺时针或者逆时针旋转!
购买链接:无刷电机控制器霍尔传感器-淘宝网 (taobao.com)
有小伙伴问,能不能级联做四驱驱动,或者六轮驱动,当然可以,我这次特地把CAN总线预留出来,就是让你们可以自由发挥自行并联多个控制器用的。板载485,动手能力强的小伙伴可以自己设计一个中控板,进行数据处理,和控制分发,给到每个控制器就行啦!
这篇关于论如何自研电动车控制器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








