本文主要是介绍【智能算法】蜻蜓算法(DA)原理及实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 1.背景
- 2.算法原理
- 2.1算法思想
- 2.2算法过程
- 3.代码实现
- 4.参考文献
1.背景
2016年,Mirjalili受到蜻蜓静态和动态集群行为启发,提出了蜻蜓算法(Dragonfly algorithm, DA)。
2.算法原理
2.1算法思想
蜻蜓集群有两种行为目的:狩猎(静态集群)和迁徙(动态集群)。静态集群中,蜻蜓分成小群捕猎,局部移动和突然飞行路径变化是其特征。动态集群则是大量蜻蜓在单一方向上长距离迁徙。这两种行为类似于元启发式优化中的探索和开发利用阶段,静态集群探索不同区域,而动态集群利用大群体沿着一个方向飞行。
2.2算法过程
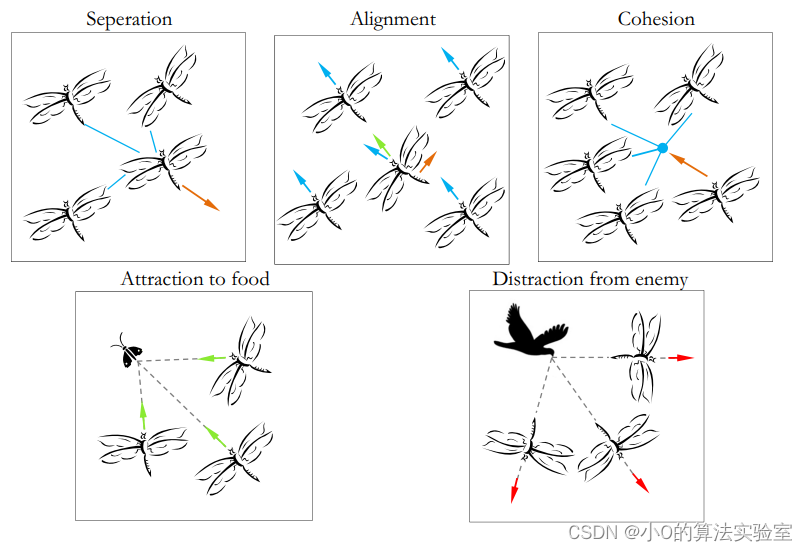
群体的行为遵循三个基本原则:
- 分离(Separation):指个体在邻域内静态地避免与其他个体碰撞
- 对齐(Alignment):表示个体的速度与邻域内其他个体的速度匹配
- 凝聚(Cohesion):指个体朝向邻域质心的趋势
分离:
S i = − ∑ j = 1 N X i − X j S_i=-\sum_{j=1}^NX_i-X_j Si=−j=1∑NXi−Xj
其中, X j X_j Xj表示第 i i i只蜻蜓领域内其他蜻蜓, S i S_i Si表示第 i i i只蜻蜓分离位置向量。
对齐:
A i = ∑ j = 1 N V j N A_{i}=\frac{\sum_{j=1}^{N}V_{j}}{N} Ai=N∑j=1NVj
其中, A i A_i Ai表示第 i i i只蜻蜓与领域内其他蜻蜓对齐的位置向量。
凝聚:
C i = ∑ j = 1 N X j N − X i C_i=\frac{\sum_{j=1}^NX_j}N-X_i Ci=N∑j=1NXj−Xi
其中, C i C_i Ci示第 i i i只蜻蜓凝聚时的位置向量。
寻找食物:
F i = X + − X i F_i=X^+-X_i Fi=X+−Xi
其中, X + X^+ X+表示猎物位置。
躲避天敌:
E i = X − + X i E_i=X^-+X_i Ei=X−+Xi
其中, X − X^- X−表示天敌位置。
位置更新:
Δ X t + 1 = ( s S i + a A i + c C i + f F i + e E i ) + w Δ X t X t + 1 = X t + Δ X t + 1 \Delta X_{t+1}=(sS_i+aA_i+cC_i+fF_i+eE_i)+w\Delta X_t \\ X_{t+1}=X_t+\Delta X_{t+1} ΔXt+1=(sSi+aAi+cCi+fFi+eEi)+wΔXtXt+1=Xt+ΔXt+1
式中参数均为权重因子。
为了提高DA随机性和探索能力,当没有邻近解时,它们需要在搜索空间中进行Lévy飞行:
X t + 1 = X t + L e ˊ vy ( d ) × X t X_{t+1}=X_t+\text{Lévy}(d)\times X_t Xt+1=Xt+Leˊvy(d)×Xt
Lévy函数表述如下(Mantegna算法):
L e ˊ vy ( x ) = 0.01 × r 1 × σ ∣ r 2 ∣ 1 β σ = ( Γ ( 1 + β ) × sin ( π β 2 ) Γ ( 1 + β 2 ) × β × 2 ( β − 1 2 ) ) 1 / β \text{Lévy}(x)=0.01\times\frac{r_1\times\sigma}{|r_2|^{\frac1\beta}} \\ \sigma=\left(\frac{\Gamma(1+\beta)\times\sin\left(\frac{\pi\beta}{2}\right)}{\Gamma\left(\frac{1+\beta}{2}\right)\times\beta\times2^{\left(\frac{\beta-1}{2}\right)}}\right)^{1/\beta} Leˊvy(x)=0.01×∣r2∣β1r1×σσ= Γ(21+β)×β×2(2β−1)Γ(1+β)×sin(2πβ) 1/β
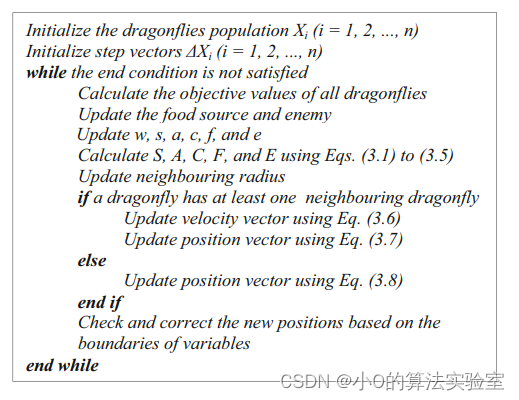
伪代码:
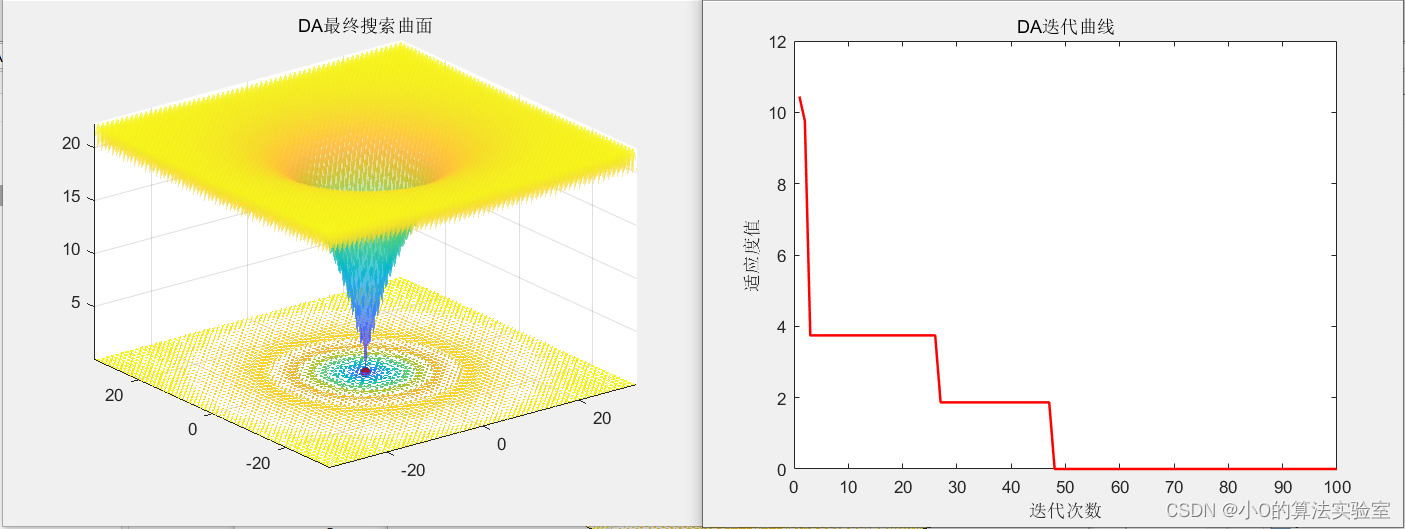
3.代码实现
% 蜻蜓优化算法
function [Best_pos,Best_fitness,Iter_curve,History_pos, History_best]=DA(pop, dim, ub,lb, fobj, maxIter)
%input
%pop 种群数量
%dim 问题维数
%ub 变量上边界
%lb 变量下边界
%fobj 适应度函数
%maxIter 最大迭代次数
%output
%Best_pos 最优位置
%Best_fitness 最优适应度值
%Iter_curve 每代最优适应度值
%History_pos 每代种群位置
%History_best 每代最优个体位置
%% 记录
Iter_curve=zeros(1,maxIter);
r=(ub-lb)/10;
Delta_max=(ub-lb)/10;
Food_fitness=inf;
Food_pos=zeros(dim,1);
Enemy_fitness=-inf;
Enemy_pos=zeros(dim,1);
%% 初始化
X=initialization(pop,dim,ub,lb);
Fitness=zeros(1,pop);
DeltaX=initialization(pop,dim,ub,lb);
%% 迭代
for iter=1:maxIterr=(ub-lb)/4+((ub-lb)*(iter/maxIter)*2);w=0.9-iter*((0.9-0.4)/maxIter);my_c=0.1-iter*((0.1-0)/(maxIter/2));if my_c<0my_c=0;ends=2*rand*my_c; % Seperation weighta=2*rand*my_c; % Alignment weightc=2*rand*my_c; % Cohesion weightf=2*rand; % Food attraction weighte=my_c; % Enemy distraction weightfor i=1:pop %Calculate all the objective values firstFitness(1,i)=fobj(X(:,i)');if Fitness(1,i)<Food_fitnessFood_fitness=Fitness(1,i);Food_pos=X(:,i);endif Fitness(1,i)>Enemy_fitnessif all(X(:,i)<ub') && all( X(:,i)>lb')Enemy_fitness=Fitness(1,i);Enemy_pos=X(:,i);endendendfor i=1:popindex=0;neighbours_no=0;clear Neighbours_DeltaXclear Neighbours_Xfor j=1:popDist2Enemy=distance(X(:,i),X(:,j));if (all(Dist2Enemy<=r) && all(Dist2Enemy~=0))index=index+1;neighbours_no=neighbours_no+1;Neighbours_DeltaX(:,index)=DeltaX(:,j);Neighbours_X(:,index)=X(:,j);endend% 分离% Eq. (3.1)S=zeros(dim,1);if neighbours_no>1for k=1:neighbours_noS=S+(Neighbours_X(:,k)-X(:,i));endS=-S;elseS=zeros(dim,1);end% 对齐% Eq. (3.2)if neighbours_no>1A=(sum(Neighbours_DeltaX')')/neighbours_no;elseA=DeltaX(:,i);end% 凝聚% Eq. (3.3)if neighbours_no>1C_temp=(sum(Neighbours_X')')/neighbours_no;elseC_temp=X(:,i);endC=C_temp-X(:,i);% 寻找食物% Eq. (3.4)Dist2Food=distance(X(:,i),Food_pos(:,1));if all(Dist2Food<=r)F=Food_pos-X(:,i);elseF=0;end% 躲避天敌% Eq. (3.5)Dist2Enemy=distance(X(:,i),Enemy_pos(:,1));if all(Dist2Enemy<=r)Enemy=Enemy_pos+X(:,i);elseEnemy=zeros(dim,1);endfor tt=1:dimif X(tt,i)>ub(tt)X(tt,i)=lb(tt);DeltaX(tt,i)=rand;endif X(tt,i)<lb(tt)X(tt,i)=ub(tt);DeltaX(tt,i)=rand;endendif any(Dist2Food>r)if neighbours_no>1for j=1:dimDeltaX(j,i)=w*DeltaX(j,i)+rand*A(j,1)+rand*C(j,1)+rand*S(j,1);if DeltaX(j,i)>Delta_max(j)DeltaX(j,i)=Delta_max(j);endif DeltaX(j,i)<-Delta_max(j)DeltaX(j,i)=-Delta_max(j);endX(j,i)=X(j,i)+DeltaX(j,i);endelse% Eq. (3.8)X(:,i)=X(:,i)+Levy(dim)'.*X(:,i);DeltaX(:,i)=0;endelsefor j=1:dim% Eq. (3.6)DeltaX(j,i)=(a*A(j,1)+c*C(j,1)+s*S(j,1)+f*F(j,1)+e*Enemy(j,1)) + w*DeltaX(j,i);if DeltaX(j,i)>Delta_max(j)DeltaX(j,i)=Delta_max(j);endif DeltaX(j,i)<-Delta_max(j)DeltaX(j,i)=-Delta_max(j);endX(j,i)=X(j,i)+DeltaX(j,i);end endFlag4ub=X(:,i)>ub';Flag4lb=X(:,i)<lb';X(:,i)=(X(:,i).*(~(Flag4ub+Flag4lb)))+ub'.*Flag4ub+lb'.*Flag4lb;endBest_fitness=Food_fitness;Best_pos=Food_pos;Iter_curve(iter)=Best_fitness;History_pos{iter} = X;History_best{iter} = Best_pos;
end
end
%% 欧式距离
function o = distance(a,b)for i=1:size(a,1)o(1,i)=sqrt((a(i)-b(i))^2);
end
end
%% 位置初始化
function Positions=initialization(SearchAgents_no,dim,ub,lb)Boundary_no= size(ub,2); if Boundary_no==1ub_new=ones(1,dim)*ub;lb_new=ones(1,dim)*lb;
elseub_new=ub;lb_new=lb;
end
for i=1:dimub_i=ub_new(i);lb_i=lb_new(i);Positions(:,i)=rand(SearchAgents_no,1).*(ub_i-lb_i)+lb_i;
endPositions=Positions';
end
%% Levy飞行
function o=Levy(d)beta=3/2;
%Eq. (3.10)
sigma=(gamma(1+beta)*sin(pi*beta/2)/(gamma((1+beta)/2)*beta*2^((beta-1)/2)))^(1/beta);
u=randn(1,d)*sigma;
v=randn(1,d);
step=u./abs(v).^(1/beta);% Eq. (3.9)
o=0.01*step;
end
4.参考文献
[1] Mirjalili S. Dragonfly algorithm: a new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems[J]. Neural computing and applications, 2016, 27: 1053-1073.
[2] Mantegna RN. Fast, accurate algorithm for numerical simulation of Lévy stable stochastic process. Phys Rev E 1994;49(5):4677–83.
这篇关于【智能算法】蜻蜓算法(DA)原理及实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






