本文主要是介绍TADynamics-车辆动力学模型库,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 车辆动力学
车辆动力学主要分为车辆纵向动力学、车辆横向动力学和车辆垂向动力学三个方面,例如急加速工况下的车身俯仰角、高速过弯时车身的质心侧偏角和高速通过障碍物时车身的振动等。
分析车辆的动力学性能,可以在车辆设计初期对其行驶的平顺性和操纵的稳定性进行预测,缩短设计周期和降低生产成本,有助于人们对车辆运行过程中动态特性的研究。TADynamics车辆动力学模型库是同元车辆TA系列模型库之一,本文将介绍该模型库的内容及其应用。
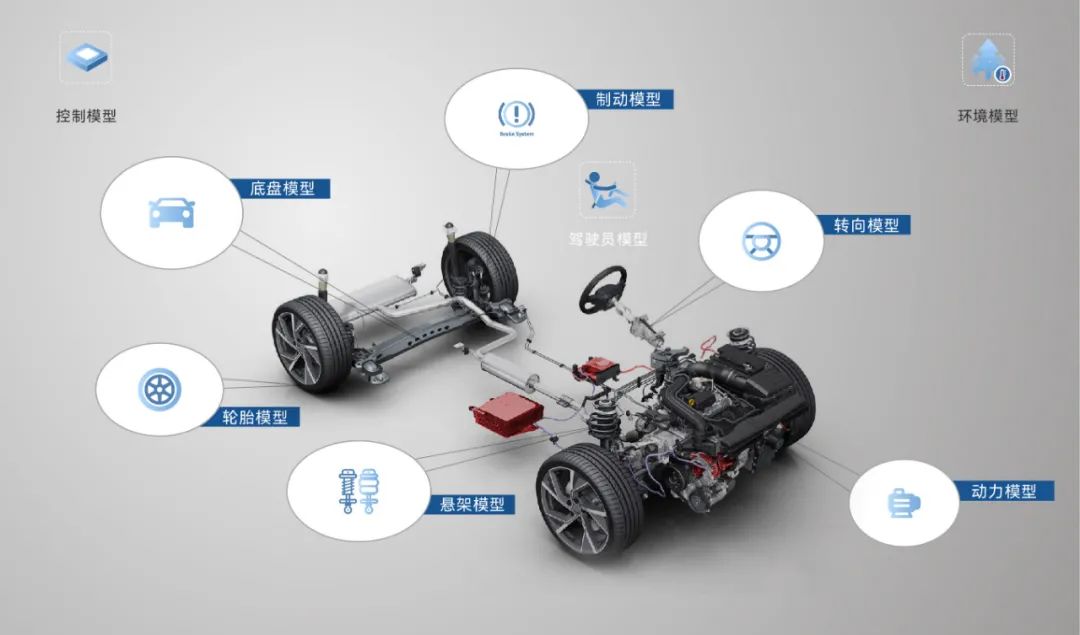
图1 车辆动力学系统组成

2 TADynamics车辆动力学模型库
TADynamics车辆动力学模型库(以下简称“动力学库”)可以模拟分析车辆在不同测试工况下的整车动力学性能,为优化整车动力学性能提供支撑。同时动力学库支持导出FMU与其他软件进行联合仿真,用户可根据不同的测试工况和场景来构建整车动力学模型。其模型架构如下图所示:

图2 车辆动力学模型架构
原文查看:TADynamics-车辆动力学模型库动力学库为优化整车动力学性能提供支撑。https://mp.weixin.qq.com/s/jgUwQuCzAs_DGu9b1mzXQA
3 系统模型介绍
动力学库由驾驶员模型、环境模型、车身/底盘模型等车辆组件模型、系统集成模型及其他相关附属模型组成。
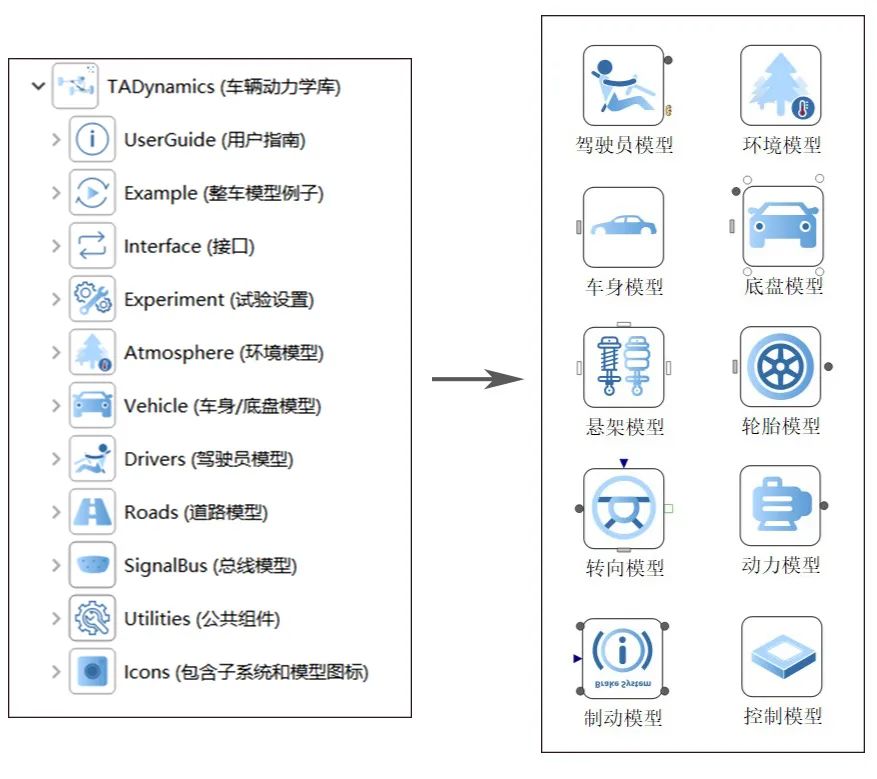
图3 组件模型示意图
3.1 驾驶员模型:模型库提供多种驾驶员模型,如转向控制驾驶员模型、通过图表/输入控制和速度跟随控制驾驶员模型等。同时驾驶员模型库提供驾驶员模板,支持用户自定义开发。
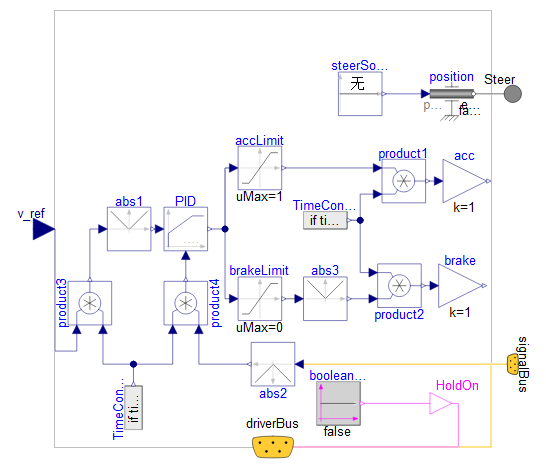
图4 速度跟随驾驶员模型
3.2 环境模型:环境模型能够定义车辆仿真环境的压强、温度、密度、风速等参数,将这些参数应用于车身模型的空气动力学计算模块,能够验证车辆在不同环境下的性能。
3.3 车身/底盘模型:车身/底盘模型主要由车身模型、底盘模型、悬架模型、轮胎模型、转向模型、动力模型、制动模型和控制模型组成。
-
车身模型:车身模型主要由质量模型、可视化模型、乘客模型、空气动力学模型组成。

图5 车身模型
-
底盘模型:底盘模型由前悬架系统、后悬架系统、车身系统、转向系统、轮胎组成。动力学库提供已完成预定义连接关系的底盘模板,模板中的悬架、转向等类型可直接通过下拉菜单的方式进行选择定义。
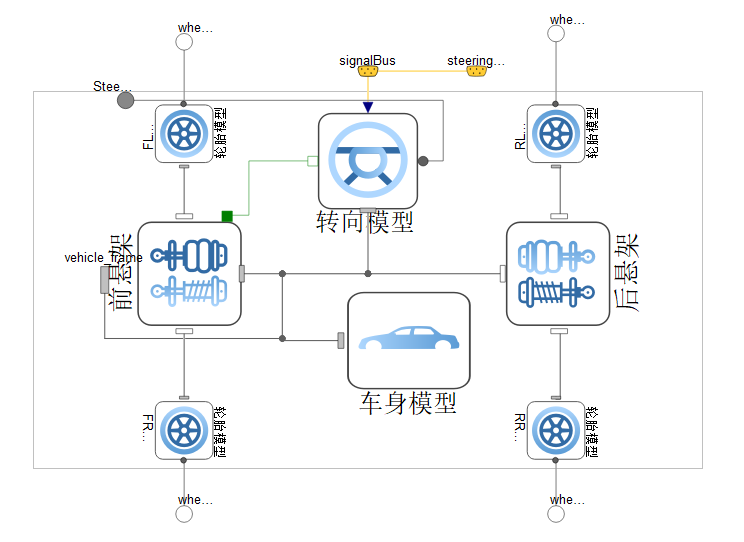
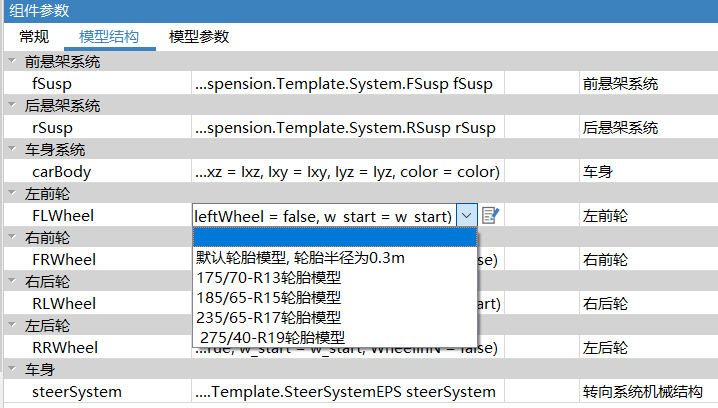
图6 底盘模型
-
悬架模型:悬架模型包括常见的悬架,如麦弗逊悬架、双叉臂悬架、多连杆悬架。悬架模型由摆臂、减震器、转向节和衬套等组成;单侧悬架通过多体接口分别连接车身和轮胎,是车身与轮胎之间的桥梁。
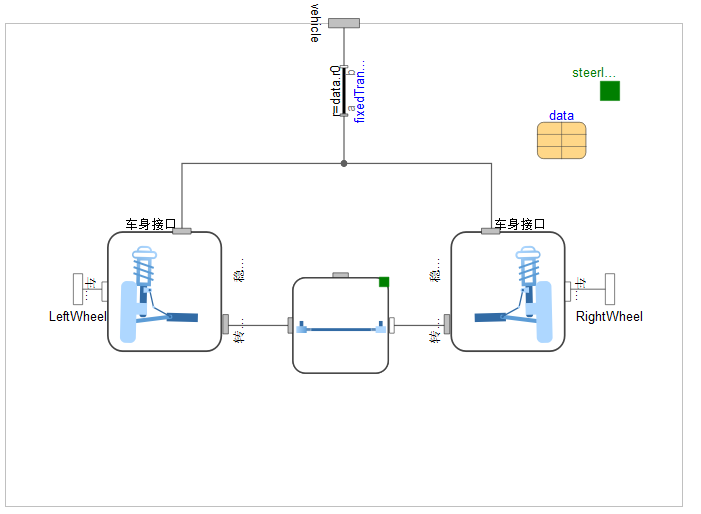
图7 麦弗逊悬架系统模型(示例)
-
轮胎模型:轮胎模型由质量模块、六分力计算模块、力/力矩应用模块、地面接触模块、速度计算模块、坐标系转换模块和道路信息处理模块组成。六分力计算模块计算轮胎与路面之间的六分力,通过力/力矩应用模块将六分力作用至底盘模型。
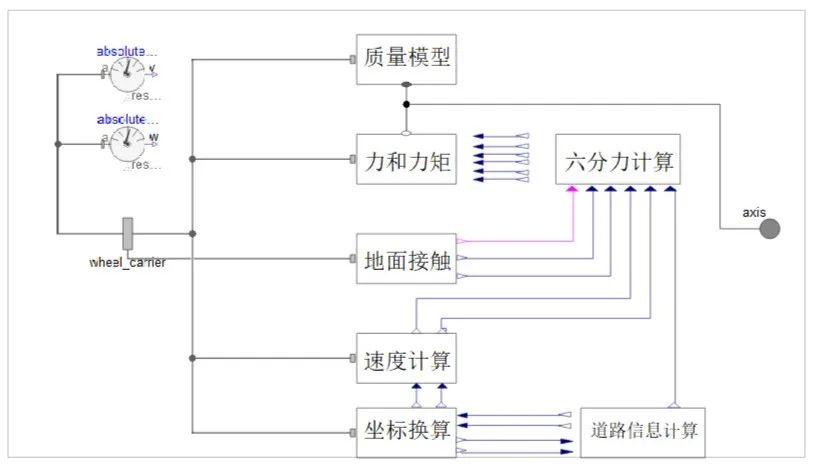
图8 轮胎模型
-
转向模型:模型库提供管柱式助力转向(C-EPS)、双小齿轮式助力转向(DP-EPS)、齿条平行式助力转向(R-EPS)、电动泵式液压助力转向(H-EPS)等多种助力转向模型。传感器采集方向盘转向操作时的转角、转速和转矩信号,通过控制策略计算助力扭矩,由动力源模型输入到转向管柱/齿轮齿条上,从而实现对转向系统的助力。
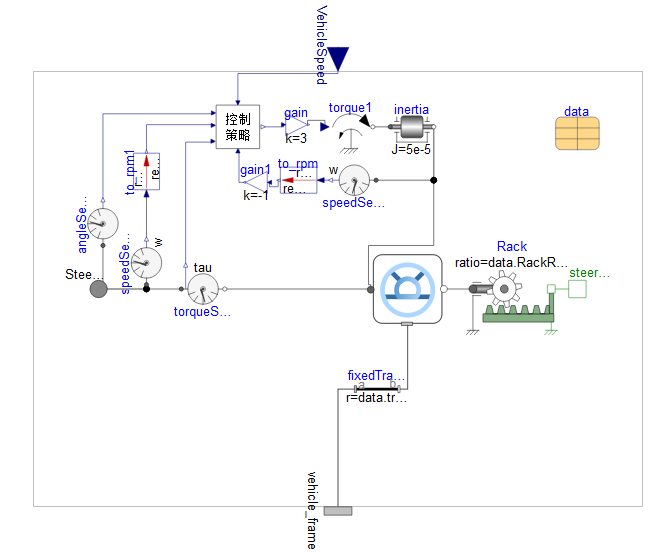
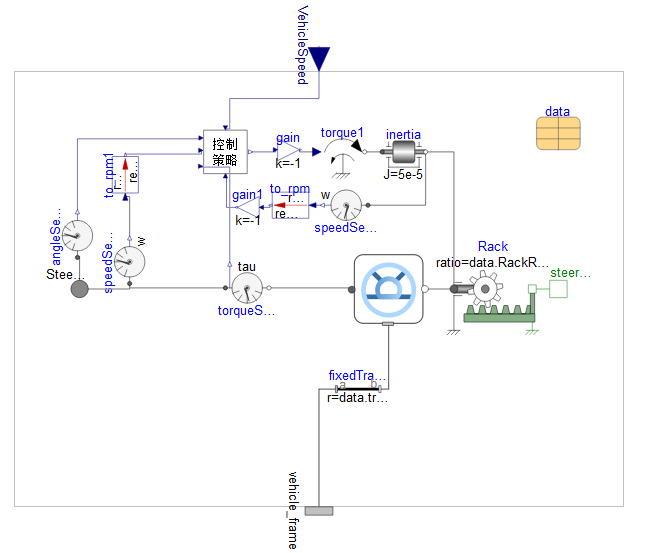
图9 管柱式助力转向模型和双小齿轮助力转向模型
-
动力模型:动力模型包含简单的固定比例动力源模型和传动系统模型。
① 动力源模型:总线输入需求转矩,通过增益模型和转矩源模型构成动力源模型。
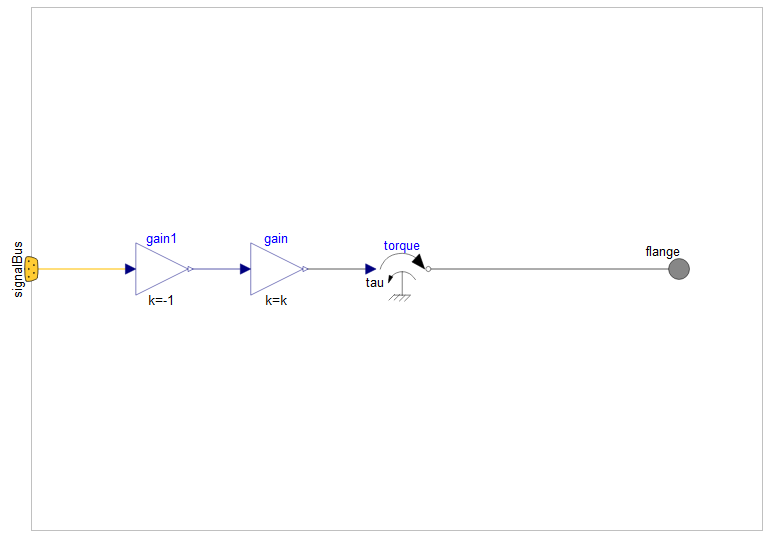
图10 动力源模型
② 传动系统模型:传动系统模型由传动轴模型、差速器模型和固定传动比模型组成。通过动力源转矩的传递,实现传动系统模型的模拟与仿真。
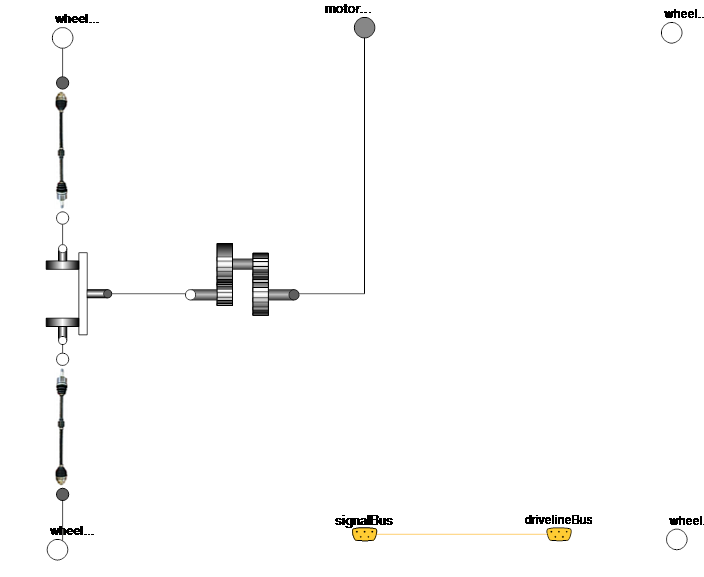
图11 传动系统模型
-
制动模型:制动模型由助力器、液压主缸、制动缸、制动卡钳以及控制系统模型组成。制动模型作用在制动踏板上的力通过助力器放大后作用在液压主缸,液压主缸再将制动液传到制动器;制动器输出制动力到车轮上形成制动扭矩使车轮减速。
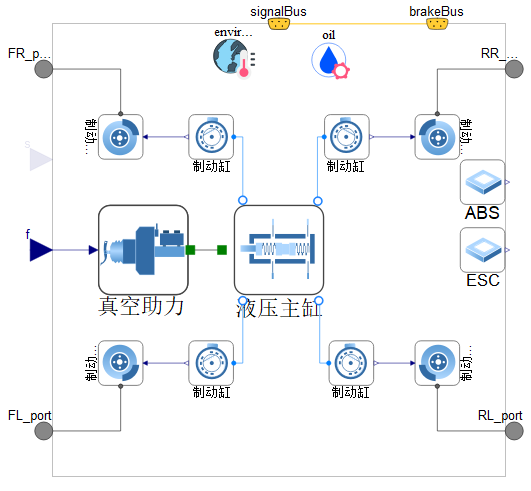

图12 液压缸组件模型和制动缸模型
① 制动助力器模型:模型库提供真空助力器、电机助力器两种助力器模型。根据助力器的输入输出特性曲线,可以将驾驶员传递的制动信号转换为制动力来推动制动液压主缸的运动,以此实现制动助力的效果。
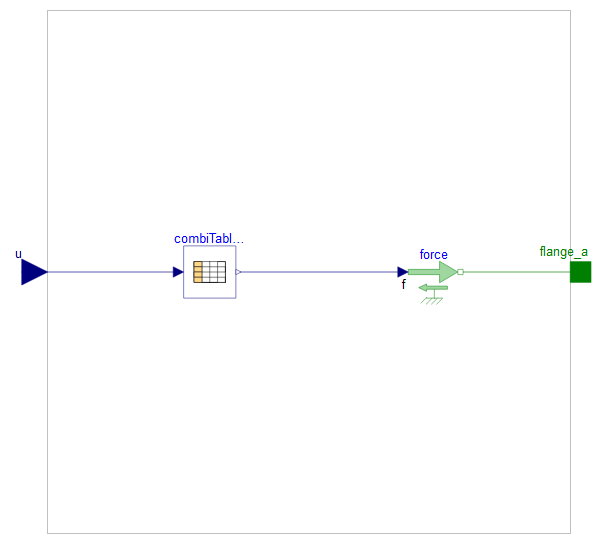
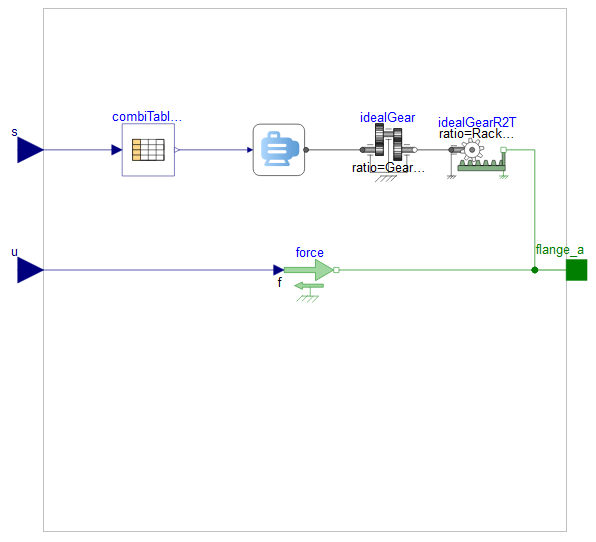
图13 真空助力器模型和电机助力器模型
② 制动液压组件模型:液压组件模型主要由液压缸组件模型、制动缸模型组成,通过液压缸组件模型将制动踏板传递过来的制动力转化为液压力,再由制动缸模型将液压力转换为制动扭矩作用到轮胎上。

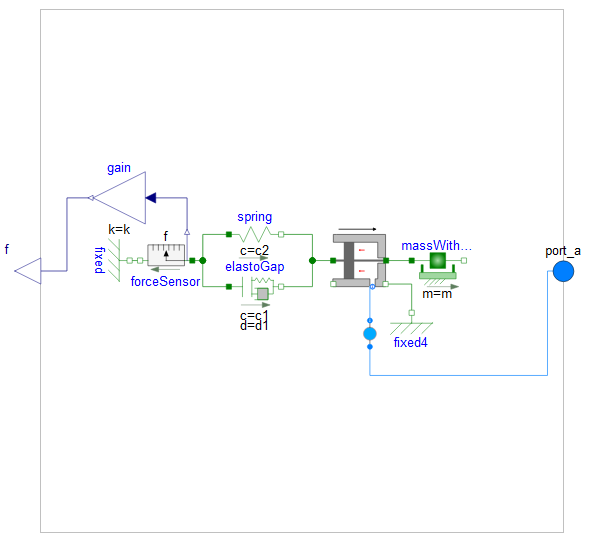
图14 液压缸组件模型和制动缸模型
-
控制模型:模型库提供防抱死控制(ABS)模型、车身稳定控制(ESC)模型、电子驻车控制(EPB)模型等多种控制模型。
① 防抱死控制(ABS)模型:动力学库提供的防抱死控制(ABS)模型通过对比轮胎当前滑移率和目标滑移率,输出各个轮胎的制动扭矩修正系数。

图15 防抱死控制(ABS)模型
② 车身稳定控制(ESC)模型:车身稳定控制模型通过调用线性二自由度模型计算理论横摆角和横向速度,与当前横摆角和横向角速度进行对比,从而计算各个制动缸的泄压/增压量。
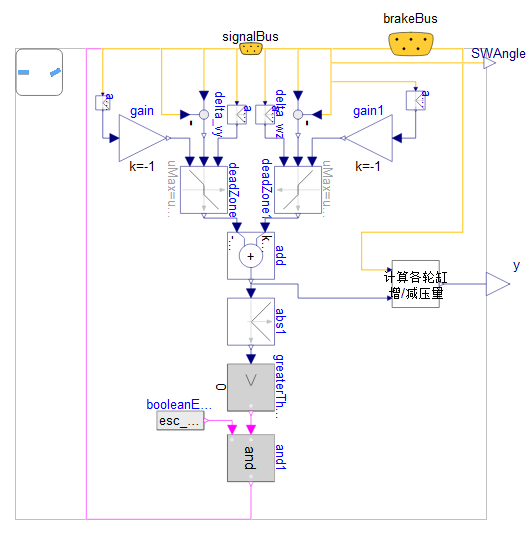
图16 车身稳定控制(ESC)模型
③ 电子驻车控制(EPB)模型:电子驻车控制(EPB)模型根据驾驶员传递的电子驻车开关控制电子驻车功能的启停。
图17 电子驻车控制(EPB)模型
4 应用场景介绍
4.1 整车操稳性和平顺性仿真
动力学库基于多体搭建,包含整车全自由度模型、悬架、车身和轮胎模型,能够应用于整车操稳性和平顺性仿真分析。
-
示例一:
如下图所示,该示例模拟美国道路法规中定义的Fishhook工况,其转向类型为Fishhook。从仿真结果可以看出,仿真开始4秒后,驾驶员转角在较短时间内阶跃至2rad,持续一段时间后达到-2rad。
-
示例二:
如下图所示,车辆在道路上行驶30m后遇到斜坡,根据其仿真结果分析车辆从平坦道路进入斜坡的动力学性能。
-
示例三:
如下图所示,该示例模拟美国道路法规中定义的JTurng工况,其转向类型为JTurn,根据仿真结果分析车辆的的动力学特性。![]()
-
示例四:
如下图所示,车辆行驶到斜坡后停在斜坡,驾驶员在第5秒时打开EPB驻车系统。![]()
4.2 子系统性能验证
动力学库同时能够应用于零部件性能分析,例如可支持悬架性能分析,例如悬架平行轮跳工况、悬架侧倾工况、悬架纵向力加载工况、悬架侧向力加载工况、悬架回正力矩加载工况、悬架转向工况等。同时悬架模型也可用于主动/半主动悬架控制策略开发验证和HIL测试。
-
示例:
下图为悬架KC台架测试,可用于分析悬架KC特性。
4.3 车辆控制策略虚拟验证
动力学库能够用于车辆纵向控制策略和横向控制策略的虚拟验证,例如轮胎防抱死控制、车身电子稳定控制等。
-
示例一:
下图为车辆高速过弯时有无车身电子稳定控制(ESC)功能的对比结果,结果显示无ESC功能的车辆在高速过弯会导致车身失稳。
![]()

有ESC功能的车辆高速过弯
![]()
无ESC功能的车辆高速过弯
-
示例二:
下图为车辆制动时,有无防抱死控制(ABS)功能的对比结果,结果显示带有ABS功能的制动距离短于无ABS功能的制动距离。
有ABS功能的车辆制动
无ABS功能的车辆制动
5 小结
TADynamics车辆动力学模型库基于MWorks.Sysplorer构建,为用户提供丰富的系统模型和应用场景,满足车辆不同工况的仿真分析。基于车辆动力学的整车级仿真,动力学库能够与同元其他车辆相关模型库联合使用,例如电机模型库Motor_TY、车辆电池模型库TABattery、车辆发动机模型库TAEngine、车辆电子模型库TAElectronic等。未来我们也将持续更新此库,所有车辆模型库将统一整理在“同元车辆TA系列模型库”话题,敬请期待。
注:车辆动力学模型库TADynamics可通过同元软控官网申请license试用,申请时备注“需额外授权 TADynamics”。
这篇关于TADynamics-车辆动力学模型库的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








