本文主要是介绍splay学习笔记重制版,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
以前写的学习笔记:传送门
但是之前写的比较杂乱,这里重制一下
问题背景
假设我们要维护一个数据结构,支持插入、删除、查询某个值的排名,查询第 k k k大的值等操作。
最直接的想法是用二叉搜索树,也就是左子树权值<根节点权值<右子树权值的数据结构。查询时,如果目标值小于根节点就往左走,否则往右走。
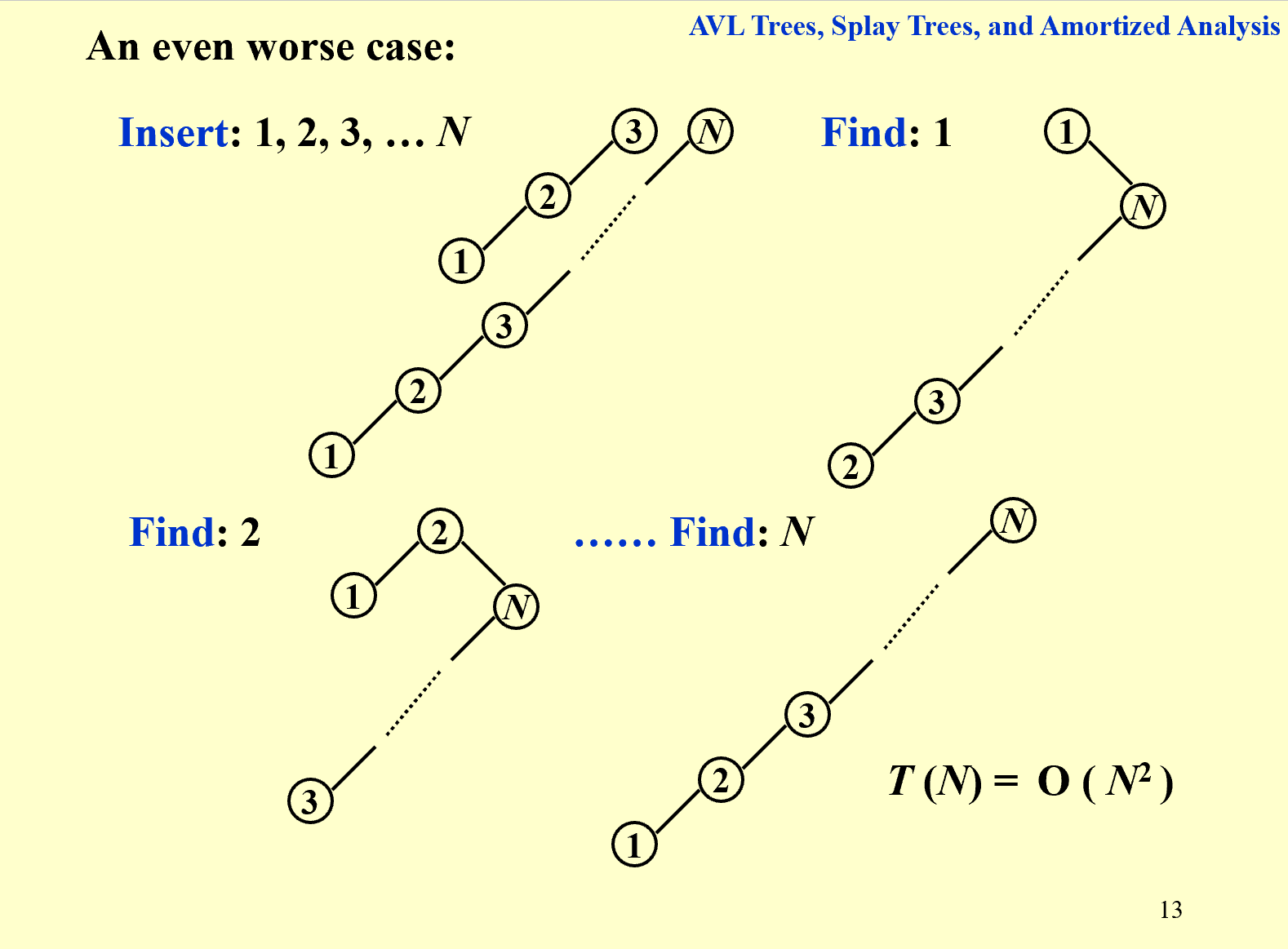
但是二叉搜索树的深度是没法保证的,树高可以达到 O ( n ) O(n) O(n)级别,这样我们的操作都是 O ( n ) O(n) O(n)的。
因此这里我们需要使用平衡树,通过一些操作来维持树的平衡,让单次操作变成 O ( log n ) O(\log n) O(logn)的复杂度。
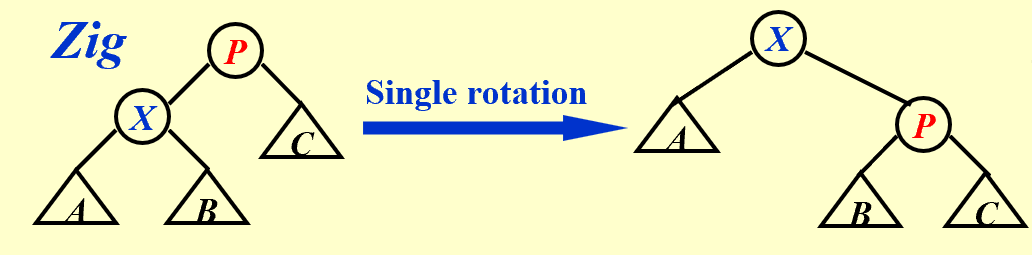
旋转操作
我们看下面这棵二叉搜索树,它的权值满足:X<B<Y<A<C。
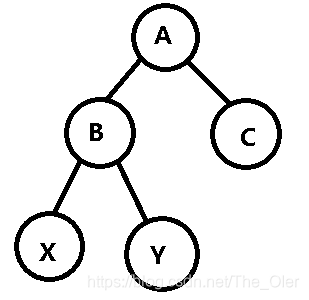
假设我们想要把B节点旋转到根节点,我们先把B往上提起来:
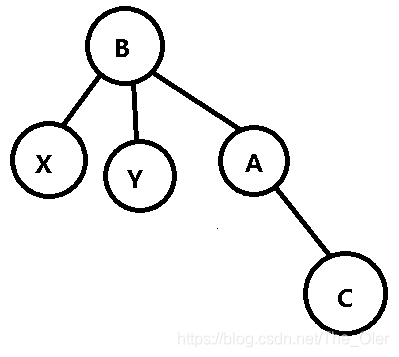
然后为了维持二叉搜索树的性质,根据X<B<Y<A<C的权值关系,我们把Y连到A上:
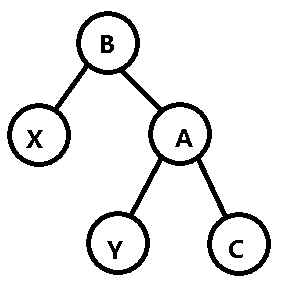
上面演示的是右旋(zig)操作,左旋(zag)类似,对A节点左旋就得到原来的树。
(具体实现的时候不用纠结是左旋还是右旋,可以通过同一个rotate函数旋转,见实现细节部分)
这样我们就把B节点往上旋转了一次,使它的深度减少了1。
我们不断旋转目标节点,直到旋转到根的这一过程,称为伸展(splay)。
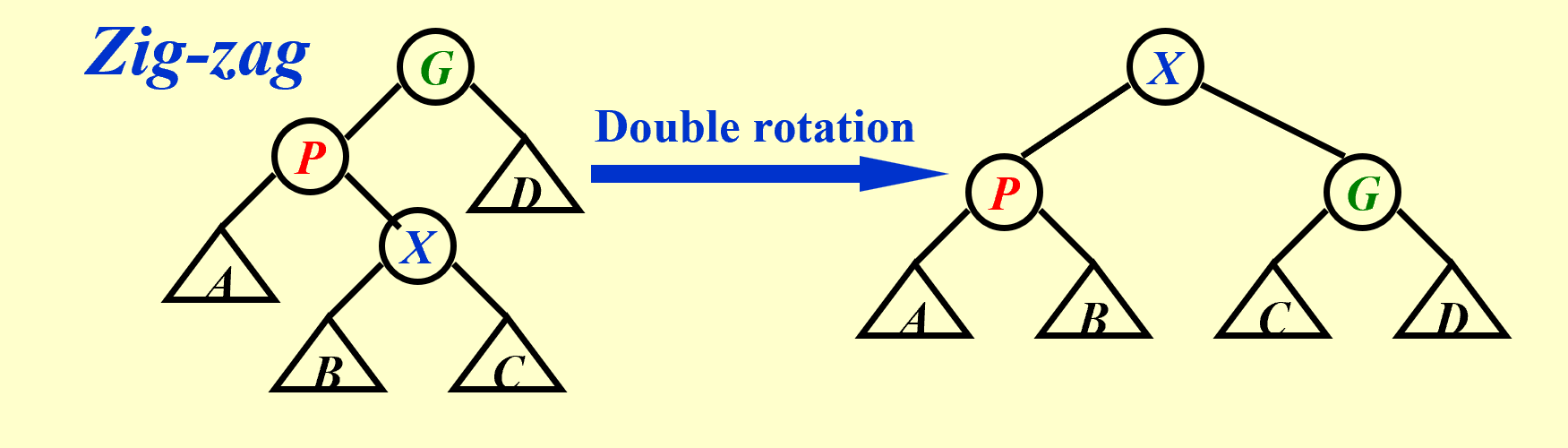
双旋操作
在把一个节点一直转到根(即splay操作)的过程中,如果我们只是一直旋转同一个节点(即单旋),我们发现这样没法保证树高维持在平均 O ( log n ) O(\log n) O(logn)。
我们需要进行双旋操作。假设需要旋转的节点是X,X的父节点为P。假如P是根节点,那只需要旋转X就可以了,比较简单。主要讨论P不是根节点的两种情况:
1.X与P所在分支反向(即X和P一个是左孩子,一个是右孩子)
这种情况我们旋转X两次就可以了。由于X和P所在分支方向相反,所以这两次旋转一次是左旋,一次是右旋。
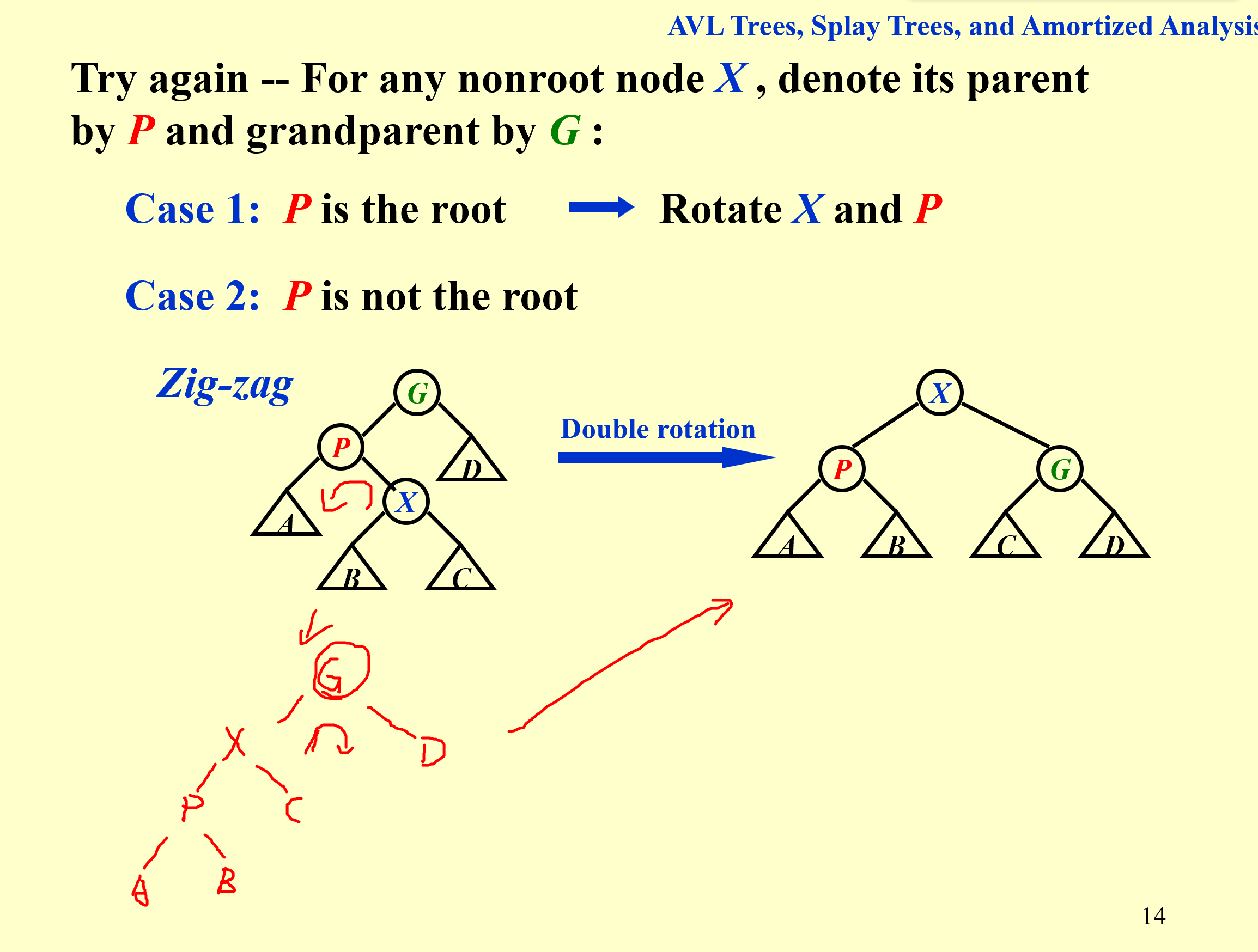
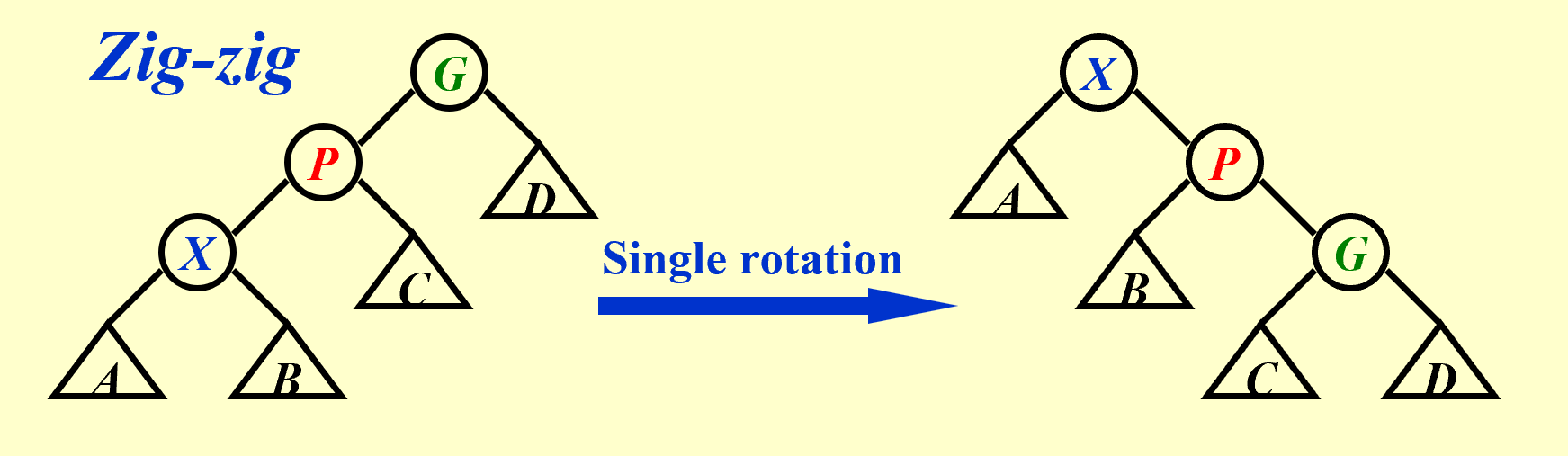
2.X与P所在分支同向(即X和P同为左孩子或右孩子)
如果这里还是旋转X两次,就会导致上面提到的问题,我们的树高没法控制。
所以这种情况我们要先旋转P,再旋转X。
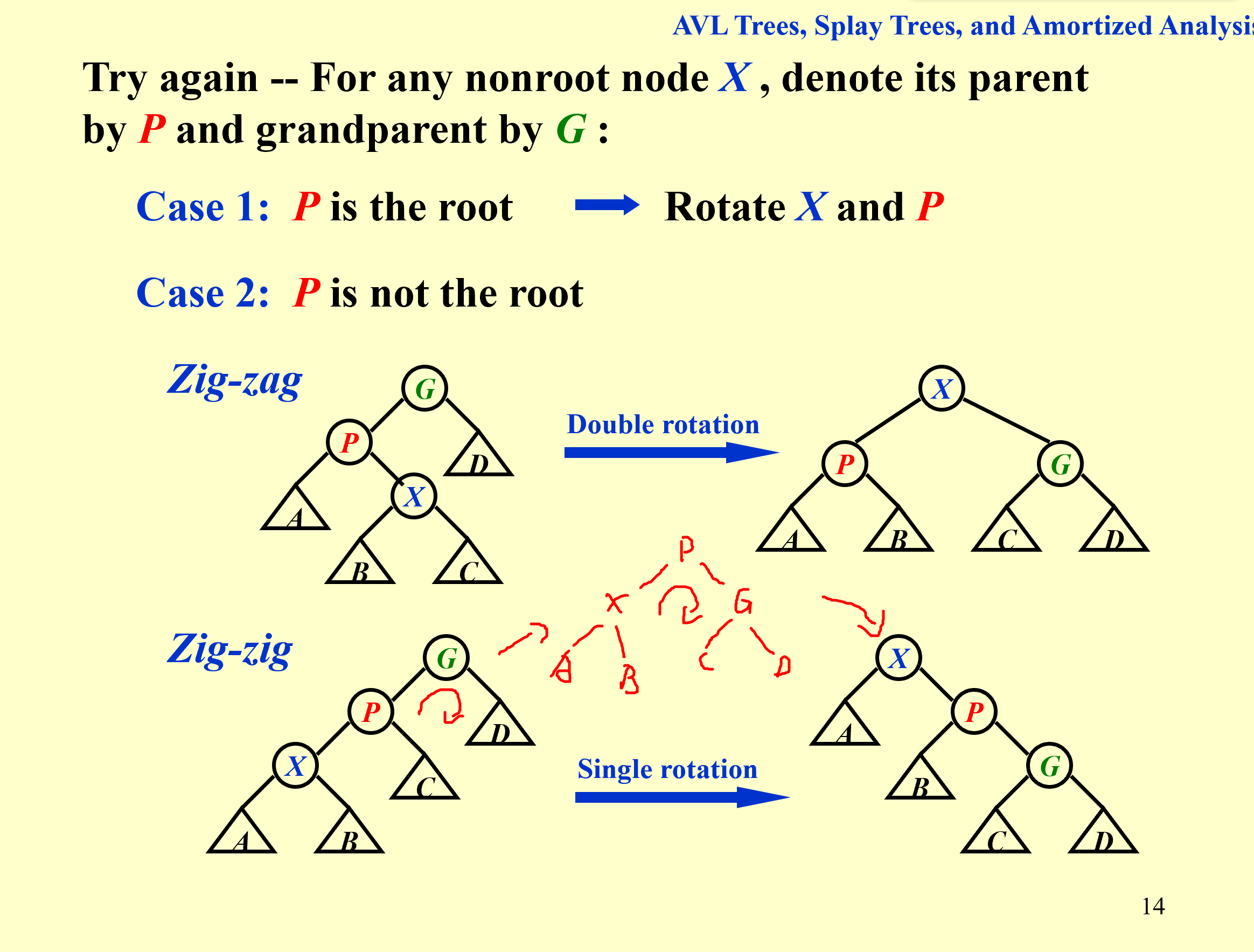
总结:同向先转父节点,反向转两次自己。
时间复杂度分析
这部分可以全部跳过,只需要知道均摊复杂度为 O ( log n ) O(\log n) O(logn)即可。
均摊时间复杂度介绍
均摊时间复杂度,其实就是每一次操作平均下来的复杂度。在多次操作中,一些操作用时比较长,另一些操作用时比较短,我们需要计算所有复杂度加起来除以操作数得到的结果。
在splay树中,我们把“将任意一个节点旋转到根节点”称为一次操作。
单次操作的复杂度最高为 O ( n ) O(n) O(n),但是总的均摊复杂度为 O ( log n ) O(\log n) O(logn)。
均摊时间复杂度计算
这个在以前写的学习笔记的最后部分有介绍,但是写得很乱。我们这里介绍势能分析方法。
假设我们有 m m m个操作,开销分别为 c 1 , c 2 , . . . , c m c_1,c_2,...,c_m c1,c2,...,cm。那么这 m m m次操作的总复杂度为 ∑ i = 1 m c i \sum\limits_{i=1}^{m}c_i i=1∑mci,单次操作的复杂度为 ∑ i = 1 m c i m \frac{\sum\limits_{i=1}^mc_i}{m} mi=1∑mci。
通常 ∑ i = 1 m c i \sum\limits_{i=1}^mc_i i=1∑mci是不太好算的,因此我们可以引入一个势能函数 Φ \Phi Φ(这个势能函数是我们根据具体问题设计的,不是一个固定的函数), Φ ( D i ) \Phi(D_i) Φ(Di)表示第 i i i次操作之后数据结构的“势能”。
定义 t i = c i + Φ ( D i ) − Φ ( D i − 1 ) t_i=c_i+\Phi(D_i)-\Phi(D_{i-1}) ti=ci+Φ(Di)−Φ(Di−1),表示一种操作的开销与引起的势能变化之和。
那么 ∑ i = 1 m t i = ∑ i = 1 m ( c i + Φ ( D i ) − Φ ( D i − 1 ) ) = ∑ i = 1 m c i + Φ ( D m ) − Φ ( D 0 ) \sum\limits_{i=1}^mt_i=\sum\limits_{i=1}^m(c_i+\Phi(D_i)-\Phi(D_{i-1}))=\sum\limits_{i=1}^mc_i+\Phi(D_m)-\Phi(D_0) i=1∑mti=i=1∑m(ci+Φ(Di)−Φ(Di−1))=i=1∑mci+Φ(Dm)−Φ(D0)。
只要我们合理地设计这个 Φ \Phi Φ,使得 ∑ i = 1 m t i \sum\limits_{i=1}^mt_i i=1∑mti能算出来,而且 Φ ( D m ) ≥ Φ ( D 0 ) \Phi(D_m)\ge\Phi(D_0) Φ(Dm)≥Φ(D0),我们就可以得到 ∑ i = 1 m c i ≤ ∑ i = 1 m t i \sum\limits_{i=1}^mc_i\le\sum\limits_{i=1}^mt_i i=1∑mci≤i=1∑mti,并把 ∑ i = 1 m t i m \frac{\sum\limits_{i=1}^mt_i}{m} mi=1∑mti当作实际上的单次时间复杂度(即均摊复杂度,amortized cost)。
splay均摊复杂度分析
下面分析过程中, log \log log的底数都为2(e.g. log 1024 = 10 \log 1024 = 10 log1024=10)。
我们定义splay树中某个节点 x x x的子树大小为 S ( x ) S(x) S(x),势能 R ( x ) = log S ( x ) R(x)=\log S(x) R(x)=logS(x)。(S代表size,R代表rank)
整棵树的势能 Φ ( T ) = ∑ i ∈ T R ( i ) = ∑ i ∈ T log S ( i ) \Phi(T)=\sum\limits_{i\in T}R(i)=\sum\limits_{i\in T}\log S(i) Φ(T)=i∈T∑R(i)=i∈T∑logS(i)。
在将某个节点X splay到根节点的过程中,总共有3种情况:(设X的父亲为P)
1.P为根节点,则旋转X。
2.X和P同向,先旋转P,再旋转X。
3.X和P反向,旋转两次X。
其中第一种情况最多发生一次,因为发生之后X就到根节点了。
设第 i i i次旋转的均摊复杂度为 t i t_i ti,则一次splay操作的复杂度为 ∑ t i \sum t_i ∑ti。
我们希望证明后两种情况旋转一次的 t i ≤ 3 ( R 2 ( X ) − R 1 ( X ) ) t_i\le3(R_2(X)-R_1(X)) ti≤3(R2(X)−R1(X)),第一种 t i ≤ 3 ( R 2 ( X ) − R 1 ( X ) ) + 1 t_i\le 3(R_2(X)-R_1(X))+1 ti≤3(R2(X)−R1(X))+1。
第一种情况:P为根节点,旋转X。
这种情况, c i = 1 c_i=1 ci=1,只有X和P节点的势能发生了变化(其它节点的子树大小不变)
那么 t i = c i + Φ ( T 2 ) − Φ ( T 1 ) = 1 + R 2 ( X ) − R 1 ( X ) + R 2 ( P ) − R 1 ( P ) t_i=c_i+\Phi(T_2)-\Phi(T_1)=1+R_2(X)-R_1(X)+R_2(P)-R_1(P) ti=ci+Φ(T2)−Φ(T1)=1+R2(X)−R1(X)+R2(P)−R1(P)
由于 R 2 ( P ) < R 1 ( P ) R_2(P)<R_1(P) R2(P)<R1(P),所以 t i < 1 + R 2 ( X ) − R 1 ( X ) ≤ 1 + 3 ( R 2 ( X ) − R 1 ( X ) ) t_i<1+R_2(X)-R_1(X)\le 1+3(R_2(X)-R_1(X)) ti<1+R2(X)−R1(X)≤1+3(R2(X)−R1(X))
第二种情况:X和P同向,先旋转P,再旋转X。
这里旋转了两次,所以 c i = 2 c_i=2 ci=2。另外,X,P,G节点的势能发生了变化。
t i = 2 + Φ ( T 2 ) − Φ ( T 1 ) = 2 + R 2 ( X ) − R 1 ( X ) + R 2 ( P ) − R 1 ( P ) + R 2 ( G ) − R 1 ( G ) t_i=2+\Phi(T_2)-\Phi(T_1)=2+R_2(X)-R_1(X)+R_2(P)-R_1(P)+R_2(G)-R_1(G) ti=2+Φ(T2)−Φ(T1)=2+R2(X)−R1(X)+R2(P)−R1(P)+R2(G)−R1(G)
这里 R 2 ( X ) = R 1 ( G ) R_2(X)=R_1(G) R2(X)=R1(G),所以 t i = 2 + R 2 ( P ) + R 2 ( G ) − R 1 ( X ) − R 1 ( P ) t_i=2+R_2(P)+R_2(G)-R_1(X)-R_1(P) ti=2+R2(P)+R2(G)−R1(X)−R1(P)。
注意到(注意不到怎么办?):
2 R 2 ( X ) − R 2 ( G ) − R 1 ( X ) = log S 2 ( X ) 2 S 2 ( G ) S 1 ( X ) = log ( S 2 ( G ) + S 1 ( X ) + 1 ) 2 S 2 ( G ) S 1 ( X ) 2R_2(X)-R_2(G)-R_1(X)=\log \frac{S_2(X)^2}{S_2(G)S_1(X)}=\log\frac{(S_2(G)+S_1(X)+1)^2}{S_2(G)S_1(X)} 2R2(X)−R2(G)−R1(X)=logS2(G)S1(X)S2(X)2=logS2(G)S1(X)(S2(G)+S1(X)+1)2。
令 a = S 2 ( G ) , b = S 1 ( X ) a=S_2(G),b=S_1(X) a=S2(G),b=S1(X),则 2 R 2 ( X ) − R 2 ( G ) − R 1 ( X ) = log ( a + b + 1 ) 2 a b ≥ log ( a + b ) 2 a b ≥ log 4 = 2 2R_2(X)-R_2(G)-R_1(X)=\log\frac{(a+b+1)^2}{ab}\ge\log\frac{(a+b)^2}{ab}\ge\log 4=2 2R2(X)−R2(G)−R1(X)=logab(a+b+1)2≥logab(a+b)2≥log4=2。
因此: t i ≤ ( 2 R 2 ( X ) − R 2 ( G ) − R 1 ( X ) ) + R 2 ( P ) + R 2 ( G ) − R 1 ( X ) − R 1 ( P ) t_i\le (2R_2(X)-R_2(G)-R_1(X))+R_2(P)+R_2(G)-R_1(X)-R_1(P) ti≤(2R2(X)−R2(G)−R1(X))+R2(P)+R2(G)−R1(X)−R1(P)
= 2 R 2 ( X ) − 2 R 1 ( X ) + R 2 ( P ) − R 1 ( P ) =2R_2(X)-2R_1(X)+R_2(P)-R_1(P) =2R2(X)−2R1(X)+R2(P)−R1(P)
又由于 R 2 ( P ) ≤ R 2 ( X ) , R 1 ( P ) ≥ R 1 ( X ) R_2(P)\le R_2(X),R_1(P)\ge R_1(X) R2(P)≤R2(X),R1(P)≥R1(X),
所以 t i ≤ 3 ( R 2 ( X ) − R 1 ( X ) ) t_i\le 3(R_2(X)-R_1(X)) ti≤3(R2(X)−R1(X))。
第三种情况:X和P反向,旋转两次X。
类似地,可以得到 t i ≤ 3 ( R 2 ( X ) − R 1 ( X ) ) t_i\le 3(R_2(X)-R_1(X)) ti≤3(R2(X)−R1(X))。
上面我们证明了后两种旋转的 t i ≤ 3 ( R 2 ( X ) − R 1 ( X ) ) t_i\le3(R_2(X)-R_1(X)) ti≤3(R2(X)−R1(X)),第一种 t i ≤ 3 ( R 2 ( X ) − R 1 ( X ) ) + 1 t_i\le 3(R_2(X)-R_1(X))+1 ti≤3(R2(X)−R1(X))+1。
由于第一种情况有且仅有一次,所以我们把所有旋转的 t i t_i ti加起来,消去中间项,得到 ∑ t i = 3 ( R ( X ′ ) − R ( X ) ) + 1 \sum t_i=3(R(X')-R(X))+1 ∑ti=3(R(X′)−R(X))+1。
因为 ∑ t i \sum t_i ∑ti就表示把一个节点splay到根的均摊复杂度,所以均摊复杂度即为 O ( log n ) O(\log n) O(logn)。
对于 m m m次splay操作,总复杂度为 m ∗ O ( log n ) + Φ ( T m ) − Φ ( T 0 ) m*O(\log n)+\Phi(T_m)-\Phi(T_0) m∗O(logn)+Φ(Tm)−Φ(T0)。树在成为一条链时势能取到最大值 n log n n\log n nlogn,所以 m m m次splay的总复杂度为 O ( ( m + n ) log n ) O((m+n)\log n) O((m+n)logn)。其中 n n n为节点数。
splay树的操作
不管以什么顺序选节点,我们一个个把它们splay到根,最后每次的均摊复杂度为 O ( log n ) O(\log n) O(logn)。
因此,无论是插入、删除、查询还是其他操作,我们按二叉查找树的操作进行,然后把目标节点splay到根。
由于插入、删除、查询等操作和splay操作访问的都是一样的节点,所以它们的时间复杂度和splay操作是同一个级别的,都是 O ( log n ) O(\log n) O(logn)。
实现细节
//splay树定义
struct node {int father;int val;int ch[2]; //左右孩子
} w[Size];
int chk(int x) { //chk(x)=0表示x为左孩子,=1表示x为右孩子return w[w[x].father].ch[1]==x;
}
void connect(int x,int fa,int k) {w[x].father=fa;w[fa].ch[k]=x;
}
void rotate(int x) { //把x往上旋转一次int y=w[x].father;int z=w[y].father;int yson=chk(x),zson=chk(y);connect(w[x].ch[yson^1],y,yson);connect(y,x,yson^1);connect(x,z,zson);
}
void splay(int x,int goal) { //把节点x旋转到goal的孩子的位置,goal=0表示旋转到根 int fa;while((fa=w[x].father)!=goal) {if(w[fa].father!=goal) {if(chk(x)==chk(fa)) {rotate(fa);} else {rotate(x);}}rotate(x);}if(!goal) root=x;
}
咕咕
这篇关于splay学习笔记重制版的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









