本文主要是介绍Vins-Moon配准运行,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Vins-Moon运行
- 源码地址
- 电脑配置
- 环境配置
- 编译
- 适配Kitti数据集
- 运行结果
- Euroc数据集
- kitti数据集
- evo评估(KITTI数据)
- 输出轨迹(tum格式)
- 结果
源码地址
源码链接:https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
电脑配置
Ubuntu 18.04 + ROS Melodic + GTSAM 4.0.2 + CERES 1.14.0
pcl1.8+vtk8.2.0+opencv3.2.0
环境配置
之前已经配置过LVI-SAM的环境,所以没有什么额外需要配置的(可参考之前的博客)
编译
cd ~/catkin_ws/srcgit clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.gitcd ..catkin_make -j2
注:直接catkin_make会死机
适配Kitti数据集
在config文件夹下新建kitti文件夹
新建kitti_config.yaml文件
(具体参数设置的方式,可以参考之前LVI-SAM博客)
%YAML:1.0#common parameters
imu_topic: "/imu_raw" #"/kitti/oxts/imu"
image_topic: "/kitti/camera_gray_left/image_raw"
output_path: "/home/nssc/sbk/outputs/map/vinsmoon/"#camera calibration
model_type: PINHOLE
camera_name: camera
#10_03
# image_width: 1241
# image_height: 376
# 09_30
image_width: 1226
image_height: 370
distortion_parameters:k1: 0.0k2: 0.0p1: 0.0p2: 0.0
projection_parameters:
# 10_03
# fx: 7.188560e+02
# fy: 7.188560e+02
# cx: 6.071928e+02
# cy: 1.852157e+02# 09_30fx: 7.070912e+02fy: 7.070912e+02cx: 6.018873e+02cy: 1.831104e+02# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: 0 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.# 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess.# 2 Don't know anything about extrinsic parameters. You don't need to give R,T. We will try to calibrate it. Do some rotation movement at beginning.
#If you choose 0 or 1, you should write down the following matrix.
#Rotation from camera frame to imu frame, imu^R_cam
extrinsicRotation: !!opencv-matrixrows: 3cols: 3dt: d# 10_03# data: [0.00875116, -0.00479609, 0.99995027, -0.99986428, -0.01400249, 0.00868325, 0.01396015, -0.99989044, -0.00491798]# 09_30data: [0.00781298, -0.0042792, 0.99996033,-0.99985947, -0.01486805, 0.00774856, 0.0148343 , -0.99988023, -0.00439476] #Translation from camera frame to imu frame, imu^T_cam
extrinsicTranslation: !!opencv-matrixrows: 3cols: 1dt: d# 10_03# data: [1.10224312,-0.31907194, 0.74606588]
#09_30 data: [1.14389871,-0.31271847, 0.72654605]#feature traker paprameters
max_cnt: 150 # max feature number in feature tracking
min_dist: 30 # min distance between two features
freq: 10 # frequence (Hz) of publish tracking result. At least 10Hz for good estimation. If set 0, the frequence will be same as raw image
F_threshold: 1.0 # ransac threshold (pixel)
show_track: 1 # publish tracking image as topic
equalize: 1 # if image is too dark or light, trun on equalize to find enough features
fisheye: 0 # if using fisheye, trun on it. A circle mask will be loaded to remove edge noisy points#optimization parameters
max_solver_time: 0.04 # max solver itration time (ms), to guarantee real time
max_num_iterations: 8 # max solver itrations, to guarantee real time
keyframe_parallax: 10.0 # keyframe selection threshold (pixel)#imu parameters The more accurate parameters you provide, the better performance
acc_n: 0.08 # accelerometer measurement noise standard deviation. #0.2 0.04
gyr_n: 0.004 # gyroscope measurement noise standard deviation. #0.05 0.004
acc_w: 0.00004 # accelerometer bias random work noise standard deviation. #0.02
gyr_w: 2.0e-6 # gyroscope bias random work noise standard deviation. #4.0e-5
g_norm: 9.81007 # gravity magnitude#loop closure parameters
loop_closure: 1 # start loop closure
load_previous_pose_graph: 0 # load and reuse previous pose graph; load from 'pose_graph_save_path'
fast_relocalization: 0 # useful in real-time and large project
pose_graph_save_path: "/home/nssc/sbk/outputs/map/vinsmoon/pose_graph/" # save and load path#unsynchronization parameters
estimate_td: 0 # online estimate time offset between camera and imu
td: 0.0 # initial value of time offset. unit: s. readed image clock + td = real image clock (IMU clock)#rolling shutter parameters
rolling_shutter: 0 # 0: global shutter camera, 1: rolling shutter camera
rolling_shutter_tr: 0 # unit: s. rolling shutter read out time per frame (from data sheet). #visualization parameters
save_image: 1 # save image in pose graph for visualization prupose; you can close this function by setting 0
visualize_imu_forward: 0 # output imu forward propogation to achieve low latency and high frequence results
visualize_camera_size: 0.4 # size of camera marker in RVIZ在vins_estimator/launch/文件夹下新建文件kitti.launch
(主要修改一下config_path的路径)
<launch><arg name="config_path" default = "$(find feature_tracker)/../config/kitti/kitti_config.yaml" /><arg name="vins_path" default = "$(find feature_tracker)/../config/../" /><node name="feature_tracker" pkg="feature_tracker" type="feature_tracker" output="log"><param name="config_file" type="string" value="$(arg config_path)" /><param name="vins_folder" type="string" value="$(arg vins_path)" /></node><node name="vins_estimator" pkg="vins_estimator" type="vins_estimator" output="screen"><param name="config_file" type="string" value="$(arg config_path)" /><param name="vins_folder" type="string" value="$(arg vins_path)" /></node><node name="pose_graph" pkg="pose_graph" type="pose_graph" output="screen"><param name="config_file" type="string" value="$(arg config_path)" /><param name="visualization_shift_x" type="int" value="0" /><param name="visualization_shift_y" type="int" value="0" /><param name="skip_cnt" type="int" value="0" /><param name="skip_dis" type="double" value="0" /></node></launch>运行结果
Euroc数据集
roslaunch vins_estimator euroc.launch roslaunch vins_estimator vins_rviz.launchrosbag play YOUR_PATH_TO_DATASET/MH_01_easy.bag
 同时看到groundtrue:
同时看到groundtrue:
roslaunch benchmark_publisher publish.launch sequence_name:=MH_01_easy
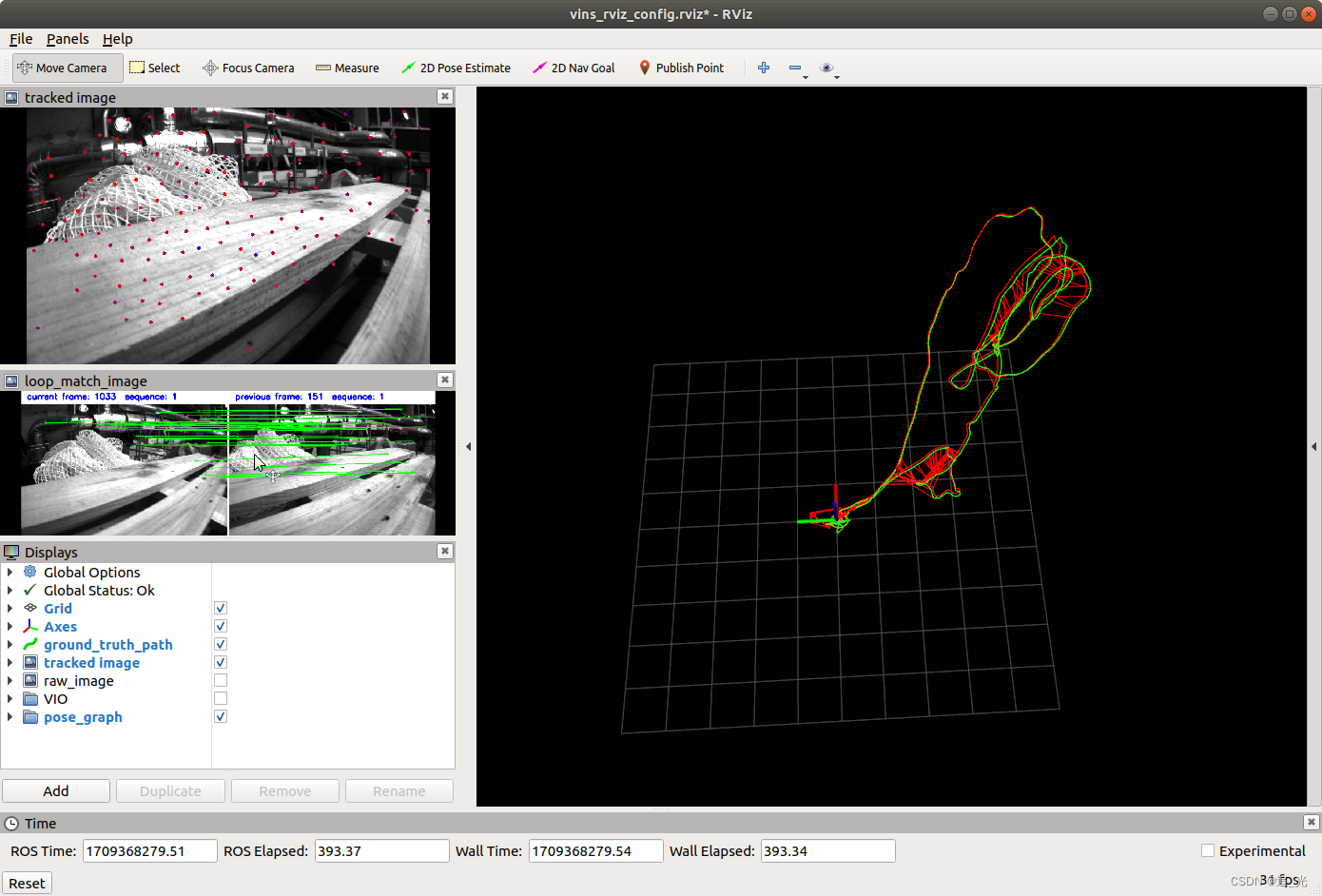
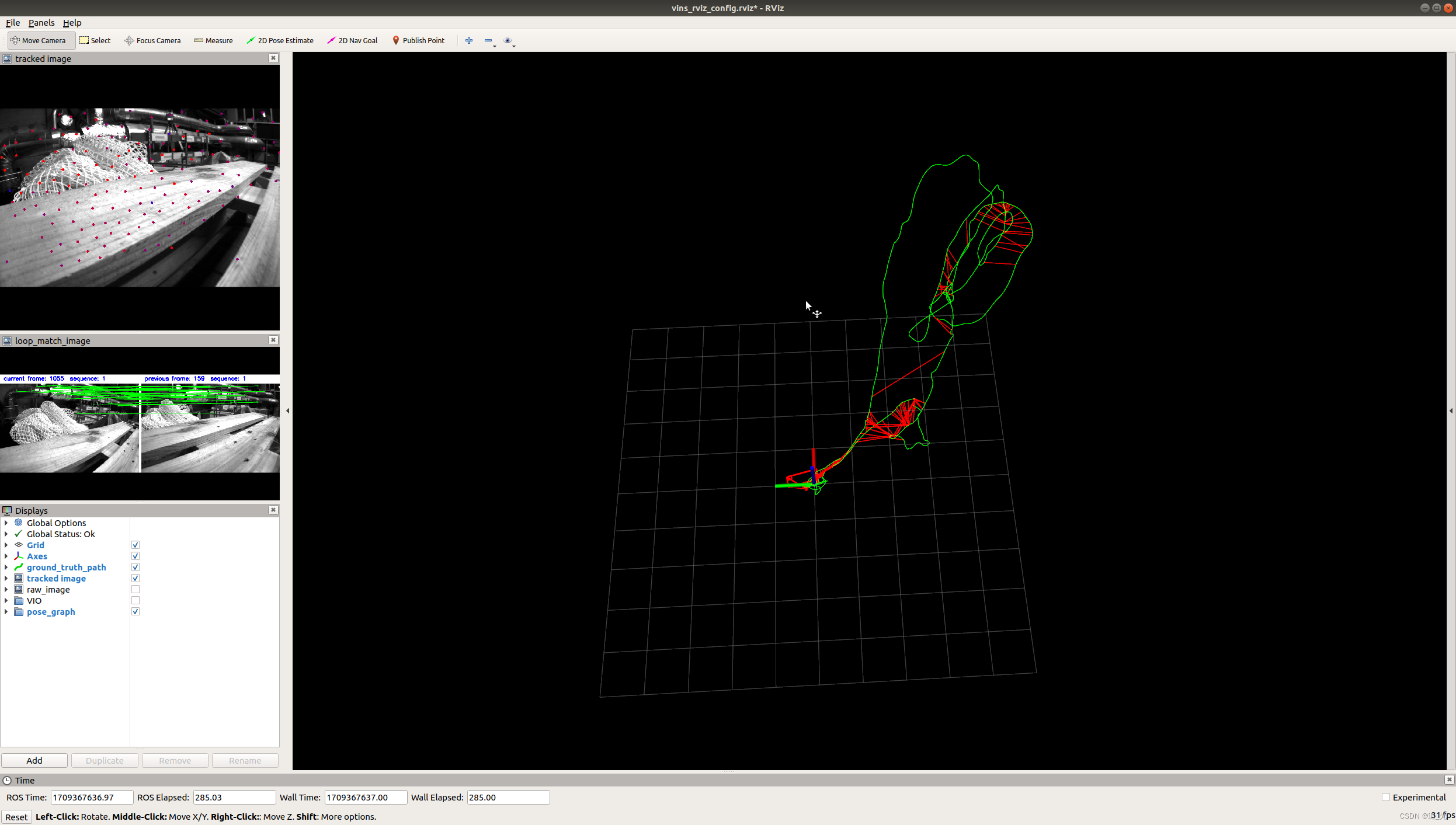
kitti数据集
有关kitti数据集生成bag包的方式,可参考之前生成LVI-SAM适配数据的博客
roslaunch vins_estimator kitti.launch roslaunch vins_estimator vins_rviz.launchrosbag play YOUR_PATH_TO_DATASET/ rosbag play kitti_2011_09_30_drive_0027_synced.bag

evo评估(KITTI数据)
输出轨迹(tum格式)
vins_estimator/src/utility/visualization.cpp
pubOdometry()函数150+行
// write result to file// ofstream foutC(VINS_RESULT_PATH, ios::app);// foutC.setf(ios::fixed, ios::floatfield);// foutC.precision(0);// foutC << header.stamp.toSec() * 1e9 << ",";// foutC.precision(5);// foutC << estimator.Ps[WINDOW_SIZE].x() << ","// << estimator.Ps[WINDOW_SIZE].y() << ","// << estimator.Ps[WINDOW_SIZE].z() << ","// << tmp_Q.w() << ","// << tmp_Q.x() << ","// << tmp_Q.y() << ","// << tmp_Q.z() << ","// << estimator.Vs[WINDOW_SIZE].x() << ","// << estimator.Vs[WINDOW_SIZE].y() << ","// << estimator.Vs[WINDOW_SIZE].z() << "," << endl;ofstream foutC(VINS_RESULT_PATH, ios::app);foutC.setf(ios::fixed, ios::floatfield);foutC.precision(9);foutC << header.stamp.toSec() << " ";foutC.precision(5);foutC << estimator.Ps[WINDOW_SIZE].x() << " "<< estimator.Ps[WINDOW_SIZE].y() << " "<< estimator.Ps[WINDOW_SIZE].z() << " "<< tmp_Q.x() << " "<< tmp_Q.y() << " "<< tmp_Q.z() << " "<< tmp_Q.w() << endl;foutC.close();
pose_graph/src/pose_graph.cpp
addKeyFrame()函数150+行
if (SAVE_LOOP_PATH){// ofstream loop_path_file(VINS_RESULT_PATH, ios::app);// loop_path_file.setf(ios::fixed, ios::floatfield);// loop_path_file.precision(0);// loop_path_file << cur_kf->time_stamp * 1e9 << ",";// loop_path_file.precision(5);// loop_path_file << P.x() << ","// << P.y() << ","// << P.z() << ","// << Q.w() << ","// << Q.x() << ","// << Q.y() << ","// << Q.z() << ","// << endl;ofstream loop_path_file(VINS_RESULT_PATH, ios::app);loop_path_file.setf(ios::fixed, ios::floatfield);loop_path_file.precision(0);loop_path_file << cur_kf->time_stamp << " ";loop_path_file.precision(5);loop_path_file << P.x() << " "<< P.y() << " "<< P.z() << " "<< Q.x() << " "<< Q.y() << " "<< Q.z() << " "<< Q.w() << endl; loop_path_file.close();}
updatePath()函数600+行
if (SAVE_LOOP_PATH){// ofstream loop_path_file(VINS_RESULT_PATH, ios::app);// loop_path_file.setf(ios::fixed, ios::floatfield);// loop_path_file.precision(0);// loop_path_file << (*it)->time_stamp * 1e9 << ",";// loop_path_file.precision(5);// loop_path_file << P.x() << ","// << P.y() << ","// << P.z() << ","// << Q.w() << ","// << Q.x() << ","// << Q.y() << ","// << Q.z() << ","// << endl;ofstream loop_path_file(VINS_RESULT_PATH, ios::app);loop_path_file.setf(ios::fixed, ios::floatfield);loop_path_file.precision(0);loop_path_file << (*it)->time_stamp << " ";loop_path_file.precision(5);loop_path_file << P.x() << " "<< P.y() << " "<< P.z() << " "<< Q.x() << " "<< Q.y() << " "<< Q.z() << " "<< Q.w() << endl;loop_path_file.close();}
pose_graph_node.cpp中的main()函数
# VINS_RESULT_PATH = VINS_RESULT_PATH + "/vins_result_loop.csv";VINS_RESULT_PATH = VINS_RESULT_PATH + "/vins_result_loop.txt";
对输出的vins_result_loop.txt文件修改时间戳
# 读取txt文件
with open('vins_result_loop.txt', 'r') as file:lines = file.readlines()# 处理数据
first_line = lines[0].strip().split()
first_num = int(first_line[0])
output_lines = []
for line in lines[0:]:parts = line.split()new_num = float(parts[0]) - first_numnew_line = str(new_num) +' '+ ' '.join(parts[1:]) + '\n'output_lines.append(new_line)# 写入txt文件
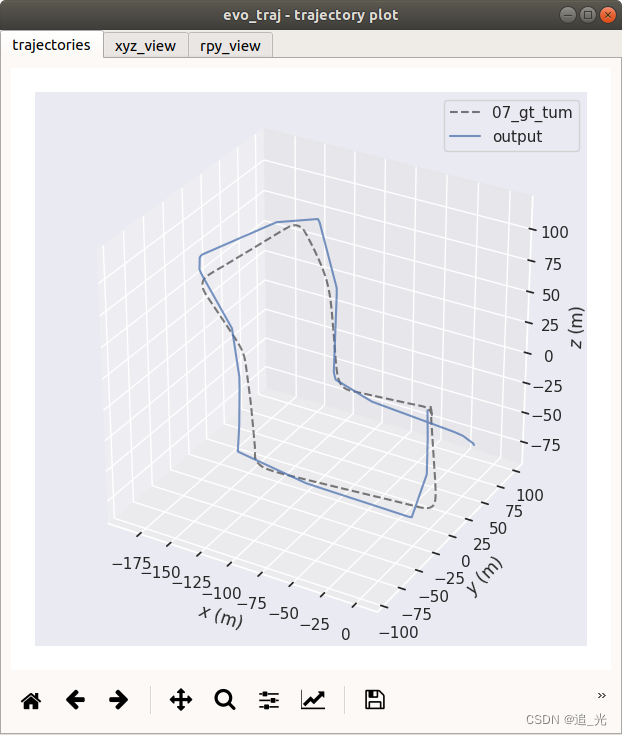
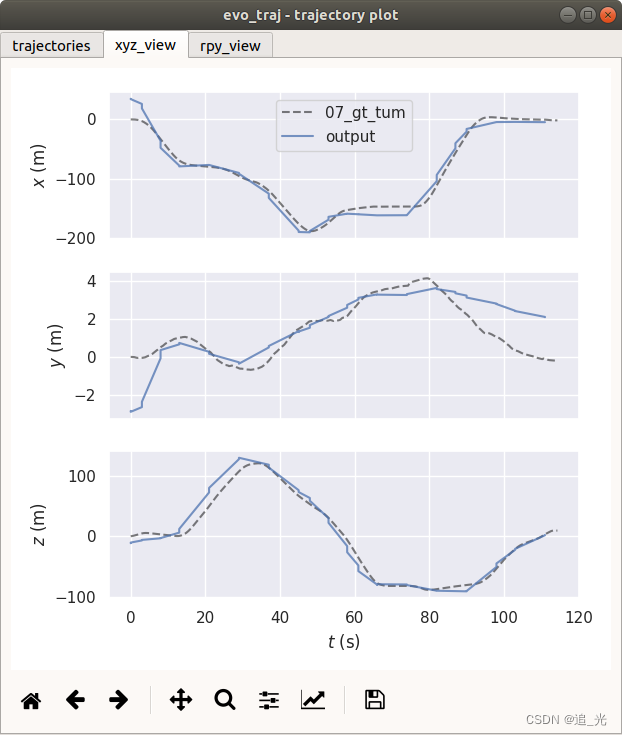
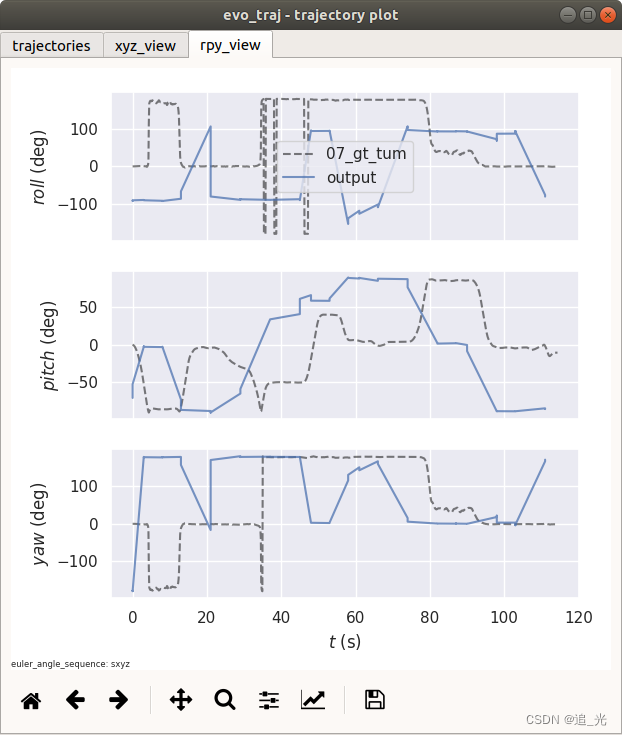
with open('output.txt', 'w') as file:for line in output_lines:file.write(''.join(line))结果
evo_traj tum output.txt 07_gt_tum.txt --ref=07_gt_tum.txt -a -p --plot_mode=xyz
参考链接:
https://blog.csdn.net/m0_49066914/article/details/131814856
https://blog.csdn.net/Hanghang_/article/details/104535370
这篇关于Vins-Moon配准运行的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




