本文主要是介绍sylar高性能服务器-日志(P43-P48)内容记录,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- P43:Hook01
- 一、HOOK
- 定义接口函数指针
- 获取接口原始地址
- 二、测试
- P44-P48:Hook02-06
- 一、hook实现基础
- 二、class FdCtx
- 成员变量
- 构造函数
- init
- setTimeout
- getTimeout
- 三、class FdManager
- 成员变量
- 构造函数
- get(获取/创建文件句柄类)
- del(删除文件句柄类)
- 四、class hook
- do_io(socket操作真正执行体)
- 定时器
- do_io
- sleep系列
- Socket系列
- connect系列
- accept
- close
- ioctl(对设备进行控制操作)
- 五、测试
P43:Hook01
sylar封装hook模块的目的就是让一些C标准库提供的同步API可以实现异步的性能。
hook将API封装成一个与原始系统调用同名的接口,在调用这个接口时,先实现一些别的操作,然后在调用原始的系统API。这样对开发者来说很方便,不用重新学习新的接口,用着同步的接口实现异步的操作。
一、HOOK
将函数接口都存放到extern "C"作用域下,指定函数按照C语言的方式进行编译和链接。它的作用是为了解决C++中函数名重载的问题,使得C++代码可以和C语言代码进行互操作。
定义接口函数指针
extern "C" {// 重新定义同名的接口// sleep_fun 为函数指针
typedef unsigned int (*sleep_fun)(unsigned int seconds);
// 它是一个sleep_fun类型的函数指针变量,表示该变量在其他文件中已经定义,我们只是在当前文件中引用它。
extern sleep_fun sleep_f;typedef int (*usleep_fun)(useconds_t usec);
extern usleep_fun usleep_f;}unsigned int sleep(unsigned int seconds) {if(!sylar::t_hook_enable) {return sleep_f(seconds);}sylar::Fiber::ptr fiber = sylar::Fiber::GetThis();sylar::IOManager* iom = sylar::IOManager::GetThis();iom->addTimer(seconds * 1000, std::bind((void(sylar::Scheduler::*)(sylar::Fiber::ptr, int thread))&sylar::IOManager::schedule,iom, fiber, -1));sylar::Fiber::YieldToHold();return 0;}int usleep(useconds_t usec) {if(!sylar::t_hook_enable) {return usleep_f(usec);}sylar::Fiber::ptr fiber = sylar::Fiber::GetThis();sylar::IOManager* iom = sylar::IOManager::GetThis();iom->addTimer(usec / 1000, std::bind((void(sylar::Scheduler::*)(sylar::Fiber::ptr, int thread))&sylar::IOManager::schedule,iom, fiber, -1));sylar::Fiber::YieldToHold();return 0;
}获取接口原始地址
使用宏来封装对每个原始接口地址的获取。
#define HOOK_FUN(XX) \XX(sleep) \XX(usleep)
将hook_init()封装到一个结构体的构造函数中,并创建静态对象,能够在main函数运行之前就能将地址保存到函数指针变量当中。
void hook_init() {static bool is_inited = false;if(is_inited) {return;}
// dlsym - 从一个动态链接库或者可执行文件中获取到符号地址。成功返回跟name关联的地址
// RTLD_NEXT 返回第一个匹配到的 "name" 的函数地址
// 取出原函数,赋值给新函数
#define XX(name) name ## _f = (name ## _fun)dlsym(RTLD_NEXT, #name);HOOK_FUN(XX);
#undef XX
}struct _HookIniter {_HookIniter() {hook_init();}
};static _HookIniter s_hook_initer;extern "C" {
// 声明变量
#define XX(name) name ## _fun name ## _f = nullptr;HOOK_FUN(XX);
#undef XX
}
上面的宏展开如下
extern "C" {sleep_fun sleep_f = nullptr;usleep_fun usleep_f = nullptr;
}void hook_init() {static bool is_inited = false;if (is_inited) {return;}sleep_f = (sleep_fun)dlsym(RTLD_NEXT, "sleep");usleep_f = (usleep_fun)dlsym(RTLD_NEXT, "usleep");
二、测试
#include"../sylar/hook.h"
#include"../sylar/log.h"
#include"../sylar/iomanager.h"sylar::Logger::ptr g_logger = SYLAR_LOG_ROOT();void test_sleep() {SYLAR_LOG_INFO(g_logger) << "start()_HY";sylar::IOManager iom(1);iom.schedule([](){sleep(2);SYLAR_LOG_INFO(g_logger) << "sleep 2";});iom.schedule([](){sleep(3);SYLAR_LOG_INFO(g_logger) << "sleep 3";});SYLAR_LOG_INFO(g_logger) << "test_sleep";
}int main(int argc, char** argv) {test_sleep();return 0;
}
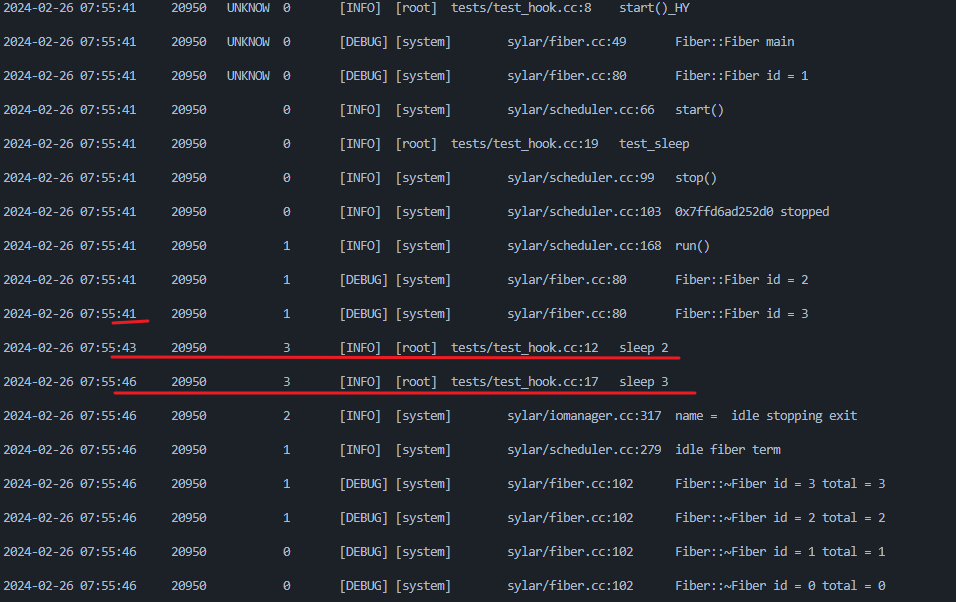
上面测试用例通过IOManager进行两次调度,第一个任务睡眠2s,第二个任务睡眠3s
不开启hook
在不开启hook的情况下,两个任务必须按着顺序执行,也就是一共需要5s时间
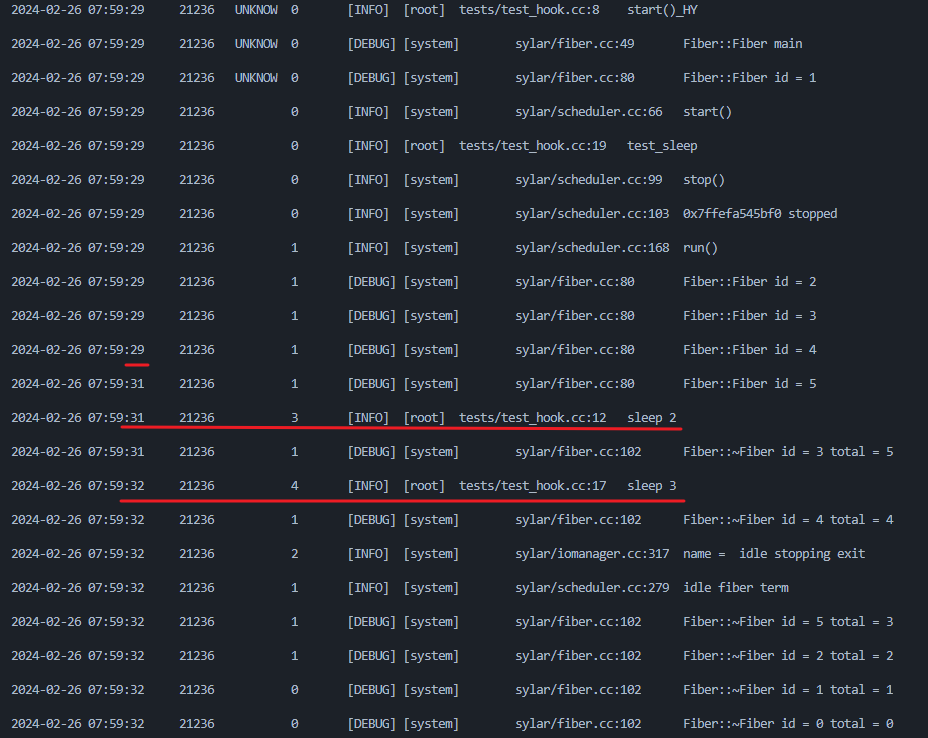
开启hook
在执行hook情况下,第一个任务在执行sleep时就添加一个2s的定时器,利用回调函数去调度本协程,然后让协程让出执行权去处理第二个任务,这样完成两个任务一共只需要3s,通过hook让只能同步的sleep实现了异步的效果
unsigned int sleep(unsigned int seconds) {if(!sylar::t_hook_enable) {return sleep_f(seconds);}sylar::Fiber::ptr fiber = sylar::Fiber::GetThis();sylar::IOManager* iom = sylar::IOManager::GetThis();iom->addTimer(seconds * 1000, std::bind((void(sylar::Scheduler::*)(sylar::Fiber::ptr, int thread))&sylar::IOManager::schedule,iom, fiber, -1));sylar::Fiber::YieldToHold();return 0;}
P44-P48:Hook02-06
以下记录参考博客链接
一、hook实现基础
通过动态库的全局符号介入,使用自定义的接口替换掉同名的系统调用接口。
系统调用接口基本上是由C标准函数库libc提供,所以这里要做的事情就是用自定义的动态库来覆盖掉libc中的同名符号。
由于动态库的全局符号介入问题,全局符号表只会记录第一次识别到的符号,后续的同名符号都被忽略,但这并不表示同名符号所在的动态库完全不会加载,因为有可能其他的符号会用到。
以libc库举例,如果用户在链接libc库之前链接了一个指定的库,并且在这个库里实现了read/write接口,那么在程序运行时,程序调用的read/write接口就是指定库里的,而不是libc库里的。libc库仍然会被加载,因为libc库是程序的运行时库,程序不可能不依赖libc里的其他接口。因为libc库也被加载了,所以,通过一定的手段,仍然可以从libc中拿到属于libc的read/write接口,这就为hook创建了条件。程序可以定义自己的read/write接口,在接口内部先实现一些相关的操作,然后再调用libc里的read/write接口。(写得真清楚!)
而将libc库中的接口重新找回来的方法就是使用dlsym()
#include <dlfcn.h>/** 第一个参数固定为 RTLD_NEXT,第二个参数为符号的名称*/
void *dlsym(void *handle, const char *symbol);
二、class FdCtx
FdCtx存储每一个fd相关的信息,并由FdManager管理每一个FdCtx,FdManager为单例类
成员变量
// 是否初始化
bool m_isInit: 1;
// 是否Socket
bool m_isSocket: 1;
// 是否hook非阻塞
bool m_sysNonblock: 1;
// 是否用户主动设置非阻塞
bool m_userNonblock: 1;
// 是否关闭
bool m_isClosed: 1;
// 文件句柄
int m_fd;
// 读超时时间毫秒
uint64_t m_recvTimeout;
// 写超时时间毫秒
uint64_t m_sendTimeout;
sylar::IOManager* m_iomanager;
构造函数
// 构造函数
FdCtx::FdCtx(int fd): m_isInit(false), m_isSocket(false), m_sysNonblock(false), m_userNonblock(false), m_isClosed(false), m_fd(fd), m_recvTimeout(-1), m_sendTimeout(-1) {init();
}
init
// 初始化
bool FdCtx::init() {// 如果已经初始化直接返回trueif(m_isInit) {return true;}// 默认发送/接收超时时间m_recvTimeout = -1;m_sendTimeout = -1;// 定义一个stat结构体struct stat fd_stat;// 通过文件描述符取得文件的状态,返回-1失败if(-1 == fstat(m_fd, &fd_stat)) {// 初始化失败并且不是Socketm_isInit = false;m_isSocket = false;} else {// 初始化成功m_isInit = true;// S_ISSOCK (st_mode) 是否为socket m_isSocket = S_ISSOCK(fd_stat.st_mode);}// 如果是socket,则给它设置为阻塞状态if(m_isSocket) {// 获取文件的flagsint flags = fcntl_f(m_fd, F_GETFL, 0);// 判断是否是阻塞的if(!(flags & O_NONBLOCK)) {// 不是则设置为阻塞fcntl_f(m_fd, F_SETFL, flags | O_NONBLOCK);}// 阻塞设置生效m_sysNonblock = true;} else {// 不是Socket则不管m_sysNonblock = false;}// 初始化用户没有设置为阻塞m_userNonblock = false;// 未关闭m_isClosed = false;// 反正初始化状态return m_isInit;
}
strcut stat
struct stat
{ dev_t st_dev; /* ID of device containing file -文件所在设备的ID*/ ino_t st_ino; /* inode number -inode节点号*/ mode_t st_mode; /* 文件的类型和存取的权限*/ nlink_t st_nlink; /* number of hard links -链向此文件的连接数(硬连接)*/ uid_t st_uid; /* user ID of owner -user id*/ gid_t st_gid; /* group ID of owner - group id*/ dev_t st_rdev; /* device ID (if special file) -设备号,针对设备文件*/ off_t st_size; /* total size, in bytes -文件大小,字节为单位*/ blksize_t st_blksize; /* blocksize for filesystem I/O -系统块的大小*/ blkcnt_t st_blocks; /* number of blocks allocated -文件所占块数*/ time_t st_atime; /* time of last access -最近存取时间*/ time_t st_mtime; /* time of last modification -最近修改时间*/ time_t st_ctime; /* time of last status change - */
};
fstat
通过文件描述符取得文件的状态
int fstat (int __fd, struct stat *__buf)
setTimeout
// 设置超时时间
void FdCtx::setTimeout(int type, uint64_t v) {// 套接字为设置Socket接收数据的超时时间if(type == SO_RCVTIMEO) {m_recvTimeout = v;} else {m_sendTimeout = v;}
}
getTimeout
// 获取超时时间
uint64_t FdCtx::getTimeout(int type) {if(type == SO_RCVTIMEO) {return m_recvTimeout;} else {return m_sendTimeout;}
}
三、class FdManager
成员变量
// 读写锁
RWMutexType m_mutex;
// 文件句柄集合
std::vector<FdCtx::ptr> m_datas;
构造函数
// 构造函数
FdManager::FdManager() {m_datas.resize(64);
}
get(获取/创建文件句柄类)
// 获取/创建文件句柄类
FdCtx::ptr FdManager::get(int fd, bool auto_create) {RWMutexType::ReadLock lock(m_mutex);// 表示集合中没有,并且也不自动创建,直接返回空指针if((int)m_datas.size() <= fd) {if(auto_create ==false) {return nullptr;}} else {// 当前有值或者不需要创建,直接返回目标值if(m_datas[fd] || !auto_create) {return m_datas[fd];}}lock.unlock();// 自动创建RWMutexType::WriteLock lock2(m_mutex);FdCtx::ptr ctx(new FdCtx(fd));m_datas[fd] = ctx;return ctx;
}
del(删除文件句柄类)
// 删除文件句柄类
void FdManager::del(int fd) {RWMutexType::WriteLock lock(m_mutex);// 没找到直接返回if((int)m_datas.size() <= fd) {return;}// 删除m_datas[fd].reset();
}
四、class hook
这里补充一些函数方法
do_io(socket操作真正执行体)
流程
-
先进行一系列判断,是否按原函数执行。
-
执行原始函数进行操作,若
errno = EINTR,则为系统中断,应该不断重新尝试操作。 -
若
errno = EAGIN,系统已经隐式的将socket设置为非阻塞模式,此时资源咱不可用。 -
若设置了超时时间,则设置一个执行周期为超时时间的条件定时器,它保证若在超时之前数据就已经来了,然后操作完
do_io执行完毕,智能指针tinfo已经销毁了,但是定时器还在,此时弱指针拿到的就是个空指针,将不会执行定时器的回调函数。 -
在条件定时器的回调函数中设置错误为
ETIMEDOUT超时,并且使用cancelEvent强制执行该任务,继续回到该协程执行。 -
通过
addEvent添加事件,若添加事件失败,则将条件定时器删除并返回错误。成功则让出协程执行权。 -
只有两种情况协程会被拉起: a. 超时了,通过定时器回调函数
cancelEvent ---> triggerEvent会唤醒回来 b.addEvent数据回来了会唤醒回来 -
将定时器取消,若为超时则返回-1并设置
errno = ETIMEDOUT,并返回-1。 -
若为数据来了则
retry,重新操作。
定时器
// 定时器超时条件
struct timer_info {int cancelled = 0;
};
do_io
/*
* fd 文件描述符
* fun 原始函数
* hook_fun_name hook的函数名称
* event 事件
* timeout_so 超时时间类型
* args 可变参数
*
* 例如:return do_io(fd, read_f, “read”, sylar::IOManager::READ, SO_RCVTIMEO, buf, count);
*/
template<typename OriginFun, typename... Args>
static ssize_t do_io(int fd, OriginFun fun, const char* hook_fun_name,uint32_t event, int timeout_so, Args&&... args) {// 非hook直接返回原接口if(!sylar::t_hook_enable) {/* 可以将传入的可变参数args以原始类型的方式传递给函数fun。* 这样做的好处是可以避免不必要的类型转换和拷贝,提高代码的效率和性能。*/return fun(fd, std::forward<Args>(args)...);}// 通过文件句柄获得对应的FdCtxsylar::FdCtx::ptr ctx = sylar::FdMgr::GetInstance()->get(fd);// 没有文件调原接口if(!ctx) {return fun(fd, std::forward<Args>(args)...);}// 如果句柄已经关闭if(ctx->isClose()) {// #define EBADF 9 /* Bad file number */errno = EBADF;return -1;}// 如果不是Socket或者用户设置了非阻塞,仍然调原接口if(!ctx->isSocket() || ctx->getUserNonblock()) {return fun(fd, std::forward<Args>(args)...);}// ------ hook要做了 ------异步IO// 获得超时时间uint64_t to = ctx->getTimeout(timeout_so);// 设置超时条件std::shared_ptr<timer_info> tinfo(new timer_info);retry:// 先执行fun 读数据或写数据 若函数返回值有效就直接返回// std::forward 是一个 C++11 中的模板函数,其主要作用是在模板函数或模板类中,// 将一个参数以“原样”(forward)的方式转发给另一个函数ssize_t n = fun(fd, std::forward<Args>(args)...);// 若中断则重试// #define EINTR 4 /* Interrupted system call */while(n == -1 && errno == EINTR) {n = fun(fd, std::forward<Args>(args)...);}// 重试// #define EAGAIN 11 /* Try again */if(n == -1 && errno == EAGAIN) {// 获得当前IO调度器sylar::IOManager* iom = sylar::IOManager::GetThis();// 定时器sylar::Timer::ptr timer;// tinfo的弱指针,可以判断tinfo是否已经销毁std::weak_ptr<timer_info> winfo(tinfo);// 设置了超时时间if(to != (uint64_t)-1) {// 添加条件定时器// to时间到了消息还没来就触发callbacktimer = iom->addConditionTimer(to, [winfo, fd, iom, event]() {auto t = winfo.lock();// 定时器失效if(!t || t->cancelled) {return;}// 没错误的话设置为超时而失败// #define ETIMEDOUT 110 /* Connection timed out */t->cancelled = ETIMEDOUT;// 取消事件强制唤醒iom->cancelEvent(fd, (sylar::IOManager::Event)(event));}, winfo);}// 默认cb为空,任务执行当前协程int rt = iom->addEvent(fd, (sylar::IOManager::Event)(event));// addEvent失败, 取消上面加的定时器if(rt) {SYLAR_LOG_ERROR(g_logger) << hook_fun_name << " addEvent("<< fd << ", " << event << ")";if(timer) {timer->cancel();}return -1;} else {/* addEvent成功,把执行时间让出来* 只有两种情况会从这回来:* 1) 超时了, timer cancelEvent triggerEvent会唤醒回来* 2) addEvent数据回来了会唤醒回来 */SYLAR_LOG_DEBUG(g_logger) << "do_io <" << hook_fun_name << ">";sylar::Fiber::YieldToHold();SYLAR_LOG_DEBUG(g_logger) << "do_io <" << hook_fun_name << ">";if(timer) {timer->cancel();}// 从定时任务唤醒,超时失败if(tinfo->cancelled) {errno = tinfo->cancelled;return -1;}// 数据来了就直接重新去操作goto retry;}}return n;
}
sleep系列
设置一个定时器然后让出执行权,超时后继续执行该协程。
回调函数使用std::bind函数将sylar::IOManager::schedule函数绑定到iom对象上,并传入fiber和-1两个参数。由于schedule是个模板类,如果直接与函数绑定,就无法确定函数的类型,从而无法使用std::bind函数。因此,需要先声明函数指针,将函数的类型确定下来,然后再将函数指针与std::bind函数进行绑定。
unsigned int sleep(unsigned int seconds) {if(!sylar::t_hook_enable) {return sleep_f(seconds);}sylar::Fiber::ptr fiber = sylar::Fiber::GetThis();sylar::IOManager* iom = sylar::IOManager::GetThis();/*** @details** (void(sylar::Scheduler::*)(sylar::Fiber::ptr, int thread)) 是一个函数指针类型,* 它定义了一个指向 sylar::Scheduler 类中一个参数为 sylar::Fiber::ptr 和 int 类型的成员函数的指针类型。* 具体来说,它的含义如下:* void 表示该成员函数的返回值类型,这里是 void 类型。* (sylar::Scheduler::*) 表示这是一个 sylar::Scheduler 类的成员函数指针类型。* (sylar::Fiber::ptr, int thread) 表示该成员函数的参数列表* ,其中第一个参数为 sylar::Fiber::ptr 类型,第二个参数为 int 类型。* * 使用 std::bind 绑定了 sylar::IOManager::schedule 函数,* 并将 iom 实例作为第一个参数传递给了 std::bind 函数,将sylar::IOManager::schedule函数绑定到iom对象上。* 在这里,第二个参数使用了函数指针类型 (void(sylar::Scheduler::*)(sylar::Fiber::ptr, int thread))* ,表示要绑定的函数类型是 sylar::Scheduler 类中一个参数为 sylar::Fiber::ptr 和 int 类型的成员函数* ,这样 std::bind 就可以根据这个函数类型来实例化出一个特定的函数对象,并将 fiber 和 -1 作为参数传递给它。*/iom->addTimer(seconds * 1000, std::bind((void(sylar::Scheduler::*)(sylar::Fiber::ptr, int thread))&sylar::IOManager::schedule,iom, fiber, -1));sylar::Fiber::YieldToHold();return 0;
}
Socket系列
int socket(int domain, int type, int protocol) {if(!sylar::t_hook_enable) {return socket_f(domain, type, protocol);}int fd = socket_f(domain, type, protocol);if(fd == -1) {return fd;}// 将fd放入到文件管理中sylar::FdMgr::GetInstance()->get(fd, true);return fd;
}
connect系列
int connect_with_timeout(int fd, const struct sockaddr* addr, socklen_t addrlen, uint64_t timeout_ms) {if(!sylar::t_hook_enable) {return connect_f(fd, addr, addrlen);}sylar::FdCtx::ptr ctx = sylar::FdMgr::GetInstance()->get(fd);if(!ctx || ctx->isClose()) {errno = EBADF;return -1;}if(!ctx->isSocket()) {return connect_f(fd, addr, addrlen);}if(ctx->getUserNonblock()) {return connect_f(fd, addr, addrlen);}// 异步开始// 尝试连接int n = connect_f(fd, addr, addrlen);// 连接成功if(n == 0) {return 0;// 失败 #define EINPROGRESS 115 /* Operation now in progress */} else if(n != -1 || errno != EINPROGRESS) {return n;}sylar::IOManager* iom = sylar::IOManager::GetThis();sylar::Timer::ptr timer;std::shared_ptr<timer_info> tinfo(new timer_info);std::weak_ptr<timer_info> winfo(tinfo);// 设置了超时时间if(timeout_ms != (uint64_t)-1) {// 加条件定时器timer = iom->addConditionTimer(timeout_ms, [winfo, fd, iom]() {auto t = winfo.lock();if(!t || t->cancelled) {return;}t->cancelled = ETIMEDOUT;iom->cancelEvent(fd, sylar::IOManager::WRITE);}, winfo);}// 添加一个写事件int rt = iom->addEvent(fd, sylar::IOManager::WRITE);if(rt == 0) {/* 只有两种情况唤醒:* 1. 超时,从定时器唤醒* 2. 连接成功,从epoll_wait拿到事件 */sylar::Fiber::YieldToHold();if(timer) {timer->cancel();}// 从定时器唤醒,超时失败if(tinfo->cancelled) {errno = tinfo->cancelled;return -1;}} else {// 添加事件失败if(timer) {timer->cancel();}SYLAR_LOG_ERROR(g_logger) << "connect addEvent(" << fd << ", WRITE) error";}int error = 0;socklen_t len = sizeof(int);// 获取套接字的错误状态if(-1 == getsockopt(fd, SOL_SOCKET, SO_ERROR, &error, &len)) {return -1;}// 没有错误,连接成功if(!error) {return 0;} else {errno = error;return -1;}
}
accept
int accept(int s, struct sockaddr *addr, socklen_t *addrlen) {int fd = do_io(s, accept_f, "accept", sylar::IOManager::READ, SO_RCVTIMEO, addr, addrlen);// 将新创建的连接放到文件管理中if(fd >= 0) {sylar::FdMgr::GetInstance()->get(fd, true);}return fd;
}
close
int close(int fd) {if(!sylar::t_hook_enable) {return close_f(fd);}sylar::FdCtx::ptr ctx = sylar::FdMgr::GetInstance()->get(fd);if(ctx) {auto iom = sylar::IOManager::GetThis();// 取消事件if(iom) {iom->cancelAll(fd);}// 在文件管理中删除sylar::FdMgr::GetInstance()->del(fd);}return close_f(fd);
}
fcntl(修改文件状态)
int fcntl(int fd, int cmd, ... /* arg */ ) {va_list va;va_start(va, cmd);switch(cmd) {case F_SETFL:{int arg = va_arg(va, int);va_end(va);sylar::FdCtx::ptr ctx = sylar::FdMgr::GetInstance()->get(fd);if(!ctx || ctx->isClose() || !ctx->isSocket()) {return fcntl_f(fd, cmd, arg);}ctx->setUserNonblock(arg & O_NONBLOCK);if(ctx->getSysNonblock()) {arg |= O_NONBLOCK;} else {arg &= ~O_NONBLOCK;}return fcntl_f(fd, cmd, arg);}break;case F_GETFL:{va_end(va);int arg = fcntl_f(fd, cmd);sylar::FdCtx::ptr ctx = sylar::FdMgr::GetInstance()->get(fd);if(!ctx || ctx->isClose() || !ctx->isSocket()) {return arg;}if(ctx->getUserNonblock()) {return arg | O_NONBLOCK;} else {return arg & ~O_NONBLOCK;}}break;case F_DUPFD:case F_DUPFD_CLOEXEC:case F_SETFD:case F_SETOWN:case F_SETSIG:case F_SETLEASE:case F_NOTIFY:
#ifdef F_SETPIPE_SZcase F_SETPIPE_SZ:
#endif{int arg = va_arg(va, int);va_end(va);return fcntl_f(fd, cmd, arg); }break;case F_GETFD:case F_GETOWN:case F_GETSIG:case F_GETLEASE:
#ifdef F_GETPIPE_SZcase F_GETPIPE_SZ:
#endif{va_end(va);return fcntl_f(fd, cmd);}break;case F_SETLK:case F_SETLKW:case F_GETLK:{struct flock* arg = va_arg(va, struct flock*);va_end(va);return fcntl_f(fd, cmd, arg);}break;case F_GETOWN_EX:case F_SETOWN_EX:{struct f_owner_exlock* arg = va_arg(va, struct f_owner_exlock*);va_end(va);return fcntl_f(fd, cmd, arg);}break;default:va_end(va);return fcntl_f(fd, cmd);}
}
ioctl(对设备进行控制操作)
int ioctl(int d, unsigned long int request, ...) {va_list va;va_start(va, request);void* arg = va_arg(va, void*);va_end(va);// FIONBIO用于设置文件描述符的非阻塞模式if(FIONBIO == request) {bool user_nonblock = !!*(int*)arg;sylar::FdCtx::ptr ctx = sylar::FdMgr::GetInstance()->get(d);if(!ctx || ctx->isClose() || !ctx->isSocket()) {return ioctl_f(d, request, arg);}ctx->setUserNonblock(user_nonblock);}return ioctl_f(d, request, arg);
}
setsockopt(设置Socket)
int setsockopt(int sockfd, int level, int optname, const void *optval, socklen_t optlen) {if(!sylar::t_hook_enable) {return setsockopt_f(sockfd, level, optname, optval, optlen);}// 如果设置socket通用选项if(level == SOL_SOCKET) {// 如果设置超时选项if(optname == SO_RCVTIMEO || optname == SO_SNDTIMEO) {sylar::FdCtx::ptr ctx = sylar::FdMgr::GetInstance()->get(sockfd);if(ctx) {const timeval* v = (const timeval*)optval;// 转为毫秒保存ctx->setTimeout(optname, v->tv_sec * 1000 + v->tv_usec / 1000);}}}return setsockopt_f(sockfd, level, optname, optval, optlen);
}
五、测试
代码
int sock = socket(AF_INET, SOCK_STREAM, 0);sockaddr_in addr;memset(&addr, 0, sizeof(addr));addr.sin_family = AF_INET;addr.sin_port = htons(80);inet_pton(AF_INET, "183.2.172.185", &addr.sin_addr.s_addr);SYLAR_LOG_INFO(g_logger) << "begin connect";int rt = connect(sock, (const sockaddr*)&addr, sizeof(addr));SYLAR_LOG_INFO(g_logger) << "connect rt = " << " errno = " << errno;if(rt) {return;}// 发送消息const char data[] = "GET / HTTP/1.0\r\n\r\n";rt = send(sock,data,sizeof(data), 0);SYLAR_LOG_INFO(g_logger) << "send rt = " << rt << " error = " << errno;if(rt <= 0) {return;}// 接收消息std::string buff;buff.resize(4096);rt = recv(sock, &buff[0], buff.size(), 0);SYLAR_LOG_INFO(g_logger) << "recv rt = " << rt << " errno = " << errno;if(rt <= 0) {return;}buff.resize(rt);SYLAR_LOG_INFO(g_logger) << buff;}结果
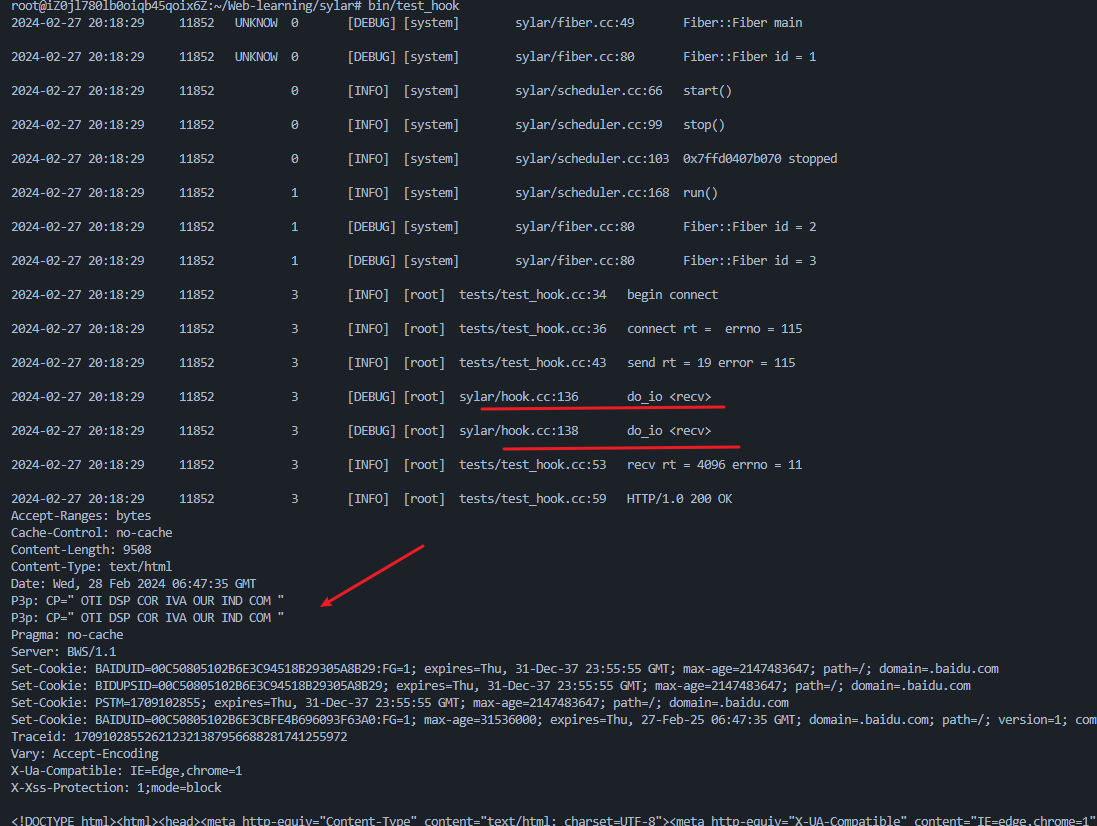
这篇关于sylar高性能服务器-日志(P43-P48)内容记录的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





